一种离地高度可调节的播种平台设计
2021-08-23谷天龙郁泽同葛佳辉徐恒伟奚小波
谷天龙,郁泽同,周 龙,葛佳辉,徐恒伟,奚小波
(扬州大学机械工程学院,江苏 扬州 225127)
0 引 言
传统式小麦播种机在播种作业中大多采用管式输送排种[1],由于小麦种植密度高,种子脱离排种器后还将经过一段管道进而落入土地,在这一过程当中,小麦种子处于不可控状态,极易发生碰撞、滚动、弹跳,导致均匀种子流受到破坏,致使播种的准确性、离散度较差,影响种子出苗及后续生长[2-3]。为此本文采用无管式贴地播种,使种子可以直接落入土地,减少了落种的不确定性因素,有利于精确排种。为进一步研究排种装置的播种性能,设计了升降调节装置,使排种口距离地面的高度在5~20 cm 可调节,有利于研究排种高度对播种性能的影响。
1 总体结构与工作原理
目前,国内外许多专家学者测试了许多模拟播种试验方法,经过大量的试验研究与对比。其中最受学者看重的是利用在帆布等类似布料上涂抹一些粘胶材料的帆布法,用来模拟小麦播种时,播种机械播种作业时小麦落种状况。本文设计的离地高度可调节的播种平台如图1 所示,其主要由排种装置、升降装置和模拟平台组成。传送带的转动模拟排种装置在土地上播种。脉冲电机驱动定轴齿轮旋转,两齿轮啮合同步传动,使得与齿条固链的机架实现升降运动,完成离地高度可控的播种。通过调速电机调节皮带传动速度来模拟播种机具的行进速度,通过排种器的转速来模拟调节播种量,通过调节排种口离传送带的距离来实现离地高度的调节。

图1 播种平台的总体结构
2 升降机构的设计
2.1 传动机构
4 条齿条分别固定于机架四角,4 个小齿轮分别与之啮合。齿轮1 齿轮2 啮合,齿轮3 齿轮4 啮合。齿轮轴孔内开有键槽,两根轴上对应位置设有平键,齿轮和轴以键传动。齿轮4 与万向节一端相连,万向节另一端接伺服电机。齿轮3 在此机构中起减速作用。以图2 为例,当电机逆时针转时,排种箱上升,反之下降。
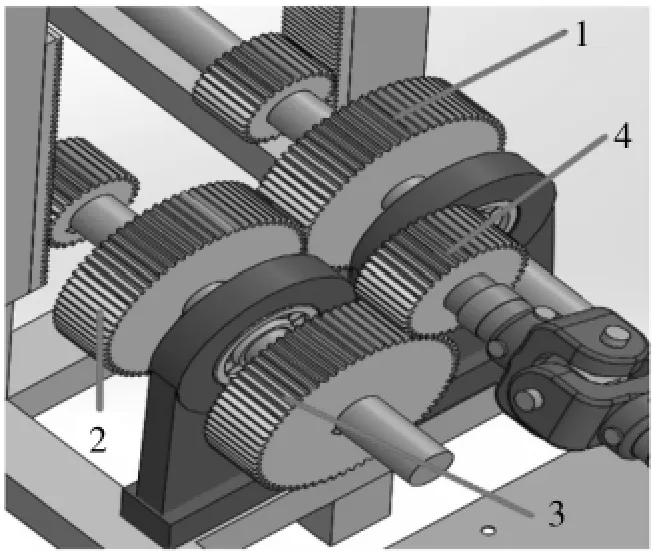
图2 升降机构
2.2 电机选型
本文所设计的可调节播种平台,使用交流伺服电机。交流伺服电机具有体积小、反应快、过载能力大、变压范围大、频率可调等特点,且可通过后端编码器反馈构成直流伺服。本设备要求每个频率旋转一定的角度,需要一定的灵敏度和精准度,所以选择交流伺服电机。
(1)电机选择首先要考虑机器运行速度,最高运行行程的电机转速应控制在其额定转速之内:

式中:nnom为电机的额定转速,r/min;n 为快速行程时的伺服电机转速,r/min;Vmax为直线运行速度,m/min;u 为传动比;Pn为丝杠导程,mm。
(2)保证拥有足够的角加速度使系统反应灵敏和满足系统的稳定性要求,负载惯量JL要限制在2.5倍的电机惯量JM之内,即:

式中:Jj为各转动件的转动惯量,kg·m2;ωj为各转动件角速度,rad/min;mj为各移动件的质量,kg;Vj为各移动件的速度,m/min;ω 为伺服电机的角速度,rad/min。
(3)空载加速转矩应限定在变频驱动系统最大输出转矩的80%以内,即:

式中:TAmax为与电机配合的变频驱动系统的最大输出转矩,N·m;Tmax为空载时加速转矩,N·m;TF为快速行程时转换到电机轴上的载荷转矩,N·m;toc为快速行程时加减速时间常数,ms。
(4)在正常的工作状态下,切削负载转矩Tms不超过电机额定转矩TMs的80%,即:

式中:Tc为最大运行转矩,N·m;D 为最大负载比。
(5)连续过载时间tlon应限制在电机的规定过载时间tMon之内。
根据上述选型要求,本设备选择80-03520AS4型的伺服电动机。
3 台架试验设计
3.1 参数设定
由于离地高度h 对贴地播种的播种作业效果影响最大,因此选取该因素进行试验设计,通过试验得出不同离地高度下的落种准确性,研究离地高度与落种准确性关系并得出一定结论。
根据小麦播种作业标准,试验过程中取作业速度1.2 m/s,试验中即为传送带的传输速度为1.2 m/s,取排种转速20 r/min。考虑到由于高度过低可能会导致落种口与地面摩擦造成损伤,因此设置最低高度为5 cm,范围取 5~15 cm;划分区间为 5、7.5、10、12.5、15 cm。试验过程采用上述齿轮传动的方法进行排种高度调节。
为准确模拟贴地宽带播种效果,试验时,在传送带中央铺上薄的透明胶带,胶带宽5 cm、长200 cm,排种器播种后种子落下粘在胶带上,通过观测胶带上的落种情况分析播种性能,可反映实际播种分布情况。透明胶带能够通过粘性固定种子落下的位置,这样也便于后续小麦播种准确性和离散度的数据采集。
3.2 评价依据
播种性能指标与测定方法参考NY/T1768—2009 《免耕播种机质量评价技术规范》[4]与NY/T996—2006《小麦精少量播种机作业质量》[5]。选取播种准确性以及播种离散度作为播种性能指标。
播种准确性μ 用于描述种子落于种槽内的准确程度,即在台架试验中种子落于胶带上的含量,计算公式如下:

式中:m1为落在胶带上的种子和胶带的总质量,g;m2为落在胶带外种子的质量,g;m3为试验用胶带的质量,g。上述质量电子天平测得。μ 值越大,代表种子落在种槽内的准确程度越高,有利于精确播种。
播种离散度V 用于描述种子落在种槽内的分散程度,在落种胶带的100~200 cm 区间内连续取10段5 cm×5 cm 的种带,记录下每粒种子距离胶带边界的距离 yi,如图 3 所示,V 可表达成:

图3 离散度检测方法

3.3 试验结果分析
对离地高度h 在区间内取值,并重复进行3 次试验,结果取平均值,试验如表1 所示,并通过Origin 得出准确性、离散度与离地高度关系数据折线,如图4 所示。

表1 试验数据结果
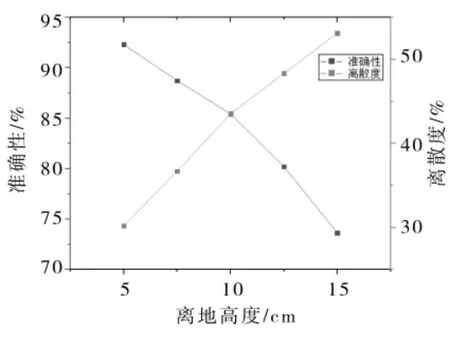
图4 μ、V 与h 关系数据折线
由图4 可知,小麦播种准确性μ 随着离地高度h 的增加而减小,离散度V 随着离地高度h 的增加而增大,并根据折线交叉图可知,两线相交点的离地高度h 值极为接近10 cm。所以取离地高度值为10 cm,保证落种准确性为85.44%,同时播种离散度为43.55%,此时的播种效果最佳。
4 结 语
本文所设计的离地高度可调节的播种平台能在一定程度上简化实验操作,获得较为准确的实验数据,有利于贴地控深播种的研究。试验结果显示,离地高度为10 cm 时播种机作业效果最佳,落种准确性为85.44%,同时播种离散度为43.55%。
