无动力助行机构及储能装置的性能分析
2021-08-20陈力宁孙雨桐王飞涵陈世豪齐迎春
陈力宁 孙雨桐 王飞涵 陈世豪 齐迎春
摘要:首先对助行机构的研究现状、研究方向、适用人群进行阐述;然后在分析人体行走过程和助行原理的基础上提出一款无动力助行机构,介绍了该无动力助行机构的组成;随后对人体行走时的步态进行捕捉,获取步态数据;最后,使用ADAMS软件进行建模仿真,测试储能机构拉伸弹簧在行走时起到的辅助作用,并对拉伸弹簧进行应力分析。
关键词:无动力助行机构;人体参数捕捉实验;ADAMS建模仿真
0 引言
医学上把辅助人体支撑体重、保持平衡和行走的工具统称为“助行器”。助行器根据助力装置的不同主要分为有动力助行器以及无动力助行器两大类。有动力助行器以电力、液压、气压为动力来源。目前,有动力助行器存在质量重、成本高、使用不方便等问题;此外,能源及续航问题也是影响有动力助行器发展的重要因素[1-4]。而无动力助行器具有无能耗、成本低、使用便捷等优势,可广泛应用于工业制造、医疗康复、辅助行走等多个领域,弥补了助行器长期以来存在的不足,更符合可持续发展的理念。
在适用人群方面,国内对于助行器的研究方向集中在助行机器人、穿戴式助行机器人、穿戴式外骨骼机器人等领域,并且均为主动式助行器,尚未出现适用于中年人(成年人)行走的无动力助行器的研究。基于此,本文提出了一种无动力助行器,其用弹簧存储一部分重力所做的功,从而实现能量转化,减少人体行走时的能量消耗。
1 助行原理
人体的行走是一个多周期循环的往复过程,下面对人体的行走过程进行分析。人体以双腿直立作为初始状态,以先左脚跨步为例,当开始行走时,双腿微屈,同时重心右移,左腿迈步,然后重心左移,右腿迈步,再接着重心左移,重新回到初始状态,完成一个周期的行走动作。分析这一过程可知,人的行走可以分为3个阶段:起步阶段、周期步行阶段和止步阶段[5]。完整的步行周期图如图1所示。
人体行走时,腿部抬起、放下过程中存在动能和势能的转化以及腰部与大腿、大腿与小腿间相对位置的变化。抬腿时,由人体提供能量,大腿抬升到一定高度后停止,此时势能最大,动能最小;随后腿部在重力和人体前倾趋势影响下前移下落,此时势能转化为动能;如果在躯干、大腿、小腿的适当位置分别安装储能、释能装置,用来存储腿部落下过程中的一部分能量,并在抬腿过程中释放这部分能量,则可减少抬腿时人体需提供的能量,从而达到助行的目的。
2 结构设计
本文所述无动力助行机构由可调节式腰带、腰部助力组件、大腿柔性可调型腿缚组成;可调节式腰带能通过腰带上魔术贴的不同位置来调节腰部尺寸大小;在腰带的两端分别安装一个助力组件,助力组件由拉伸弹簧构成;拉伸弹簧的一端固定在腰带处,另一端固定在大腿绑带处。
3 性能分析
对人体行走运动进行数据捕捉实验,测量人体行走时髋关节的角度变化。分别在人的腰部、大腿、小腿、膝部以及踝部选择5个点进行标定,在固定路程中多次行走,用摄像机进行记录。在实验过程中,利用一个等比例的刻度尺测量数值,得到各个标记点在各个时间段内相对于地面的高度。实验过程中在人体所取的5个标记点以及刻度尺的具体数值如图2所示。
在数据处理时,用鼠标进行取点,利用取得的点在Excel软件中生成曲线,得到了如图3所示的人体在行走时髋关节的角度变化曲线。
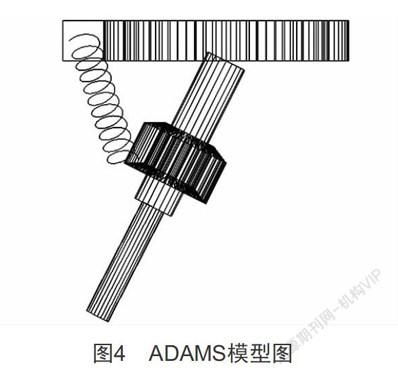
应用该曲线作为初始数据,在ADAMS软件中用圆环做简易的腰带模拟,并将腰带固定在地面上,用两个圆柱体模型模拟人体的大腿与小腿,在大腿上固定一个无质量的旋转体作为大腿腿缚。腰带与大腿之间用球副连接,大腿与小腿之间用球副连接。在腰带与大腿、大腿与小腿之间添加力矩,以图2为依据,编写力矩的运动函数,模拟人体行走。实验中大腿和小腿的质量分别为8.16 kg和2.33 kg[6],重力加速度为9.81 kg/m2。ADAMS仿真建模图如图4所示。
4 仿真结果分析
在ADAMS软件中进行运动模拟,分别测出弹簧的弹性系数k=0.25以及没有弹簧时腰带与大腿处的力矩曲线,如图5所示。
转矩的力矩曲线为负时,力矩主要克服重力;当转矩的力矩曲线为正时,力矩主要克服弹簧的拉力。
k=0.25、t=0时,弹簧处于原长,转矩的力矩为负,此时转矩克服重力;当大腿与小腿同时下落时,弹簧被拉伸存储能量,转矩的力矩从克服重力变化到克服弹簧拉力,曲线由负变为正;当大腿与小腿同时抬起时,转矩的力矩从克服弹簧拉力变化到克服重力,曲线由正变为负。弹簧加在腰带与大腿处的仿真模拟过程图如图6所示。
当腰带与大腿之间无弹簧连接时:t=0时,弹簧处于原长,转矩的力矩为负,此时转矩克服重力;当大腿与小腿同时下落时,转矩逐渐变小;当大腿与小腿同时抬起时,转矩逐渐变大。图7所示为大腿与小腿之间没有弹簧时的仿真模拟图。
大腿与小腿下落时,弹簧被拉伸,存储能量,由图5可知,在大腿与小腿同时抬起时,转矩的力矩大部分为正,克服弹簧拉力,而克服重力所需的力矩相比于没有弹簧时克服的重力明显减小,由此得出,弹簧在抬起大腿与小腿时起到了省力的作用。
5 弹簧的应力分析
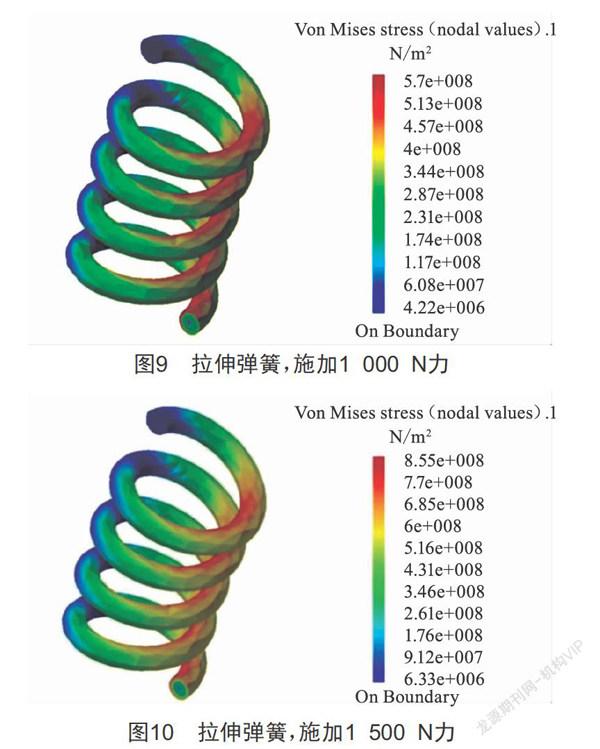
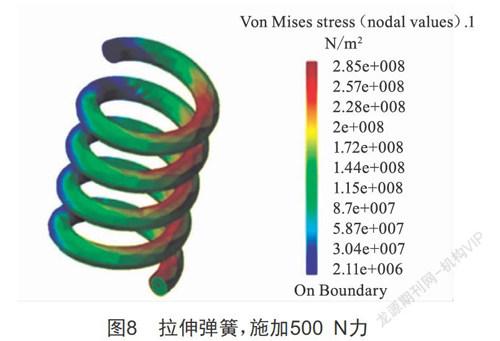
为了测定拉伸弹簧所能承受的应力以及拉伸弹簧的应力分布,在CATIA软件中建立一个新的恒定螺距的顺时针弹簧,螺距为15.00 mm,圈数为5,起始角度为135°,并对该弹簧进行应力分析。根据人体腿部的重量,分别添加500 N、1 000 N、1 500 N的力。
在弹簧的上端施加500 N的力,应力图如图8所示。
在弹簧的上端施加1 000 N的力,应力图如图9所示。
在弹簧的上端施加1 500 N的力,应力图如图10所示。
6 结语
本文设计的助行机构使用拉伸弹簧作为其储能装置,拉伸弹簧成本低,质量轻,便于穿戴,可为中年人(成年人)的日常生活行走提供辅助。本文为简化计算,将人体下肢简化为连杆模型进行仿真模拟,但人体的下肢运动机理十分复杂,故而应构建更加符合人体下肢运动学原理的物理模型,得到的数据及曲线才能够更加符合人体工程学的要求,使得助行的效果发挥到最大。
[参考文献]
[1] 李剑锋,李国通,张雷雨,等.穿戴式柔性下肢助力机器人发展现状及关键技术分析[J].自动化学报,2020,46(3):427-438.
[2] 石晓博,郭士杰,李军强,等.发展中的外骨骼机器人及其关键技术[J].机床与液压,2018,46(21):70-76.
[3] 艾莹,刘齐.机器人手腕概述[J].中外企业家,2018(19):121.
[4] GOPURA R A R C,KIGUCHI K.Mechanical designs of active upper-limb exoskeleton robots:State-of-the-
art and design difficulties[C]//Proceedings of the 2009 IEEE International Conference on Rehabi-
litation Robotics,2009:178-187.
[5] 邵杰.基于人体运动捕捉数据的仿人机器人步态规划和控制[D].北京:北京工業大学,2017.
[6] 田宏,石岫昆,石秀权,等.我国男性青年人体质量的分布[J].第四军医大学吉林军医学院学报,2001,23(3):127-128.
收稿日期:2021-04-02
作者简介:陈力宁(2000—),女,吉林长春人,研究方向:机械。
