基于滑模控制的ATO精确停车控制模型简析
2021-08-20王红红
王红红
通号国际控股有限公司系统技术处,中国·北京 100070
1 引言
在 ATO 精确停车算法的研究中,模糊控制、专家控制系统和滑模控制等算法各自均可以实现一定的停车目的,但最终效果都不是很理想。这主要是因为在制动过程中,影响车辆运动状态的轮胎力表现出很强的非线性特性并导致系统的非线性,而变结构控制正是用来实现线性和非线性系统鲁棒控制的方法,其中滑模控制在这种情况下具有理想的鲁棒性,因为它和系统的摄动性与外干扰无关。因此,通过滑模控制算法来实现精确停车逐渐成为趋势。
论文将通过对在 ATO 发展过程中相继出现的几种控制算法的优缺点进行比较和分析,逐步建立一种基于滑模控制算法、结合 PID 校正器和史密斯预估器来实现 ATO 精确停车的控制模型。
2 ATO 控制算法的优劣对比
PID 校正器[1]是将设定值与输出值的偏差按比例、积分和微分进行控制的一种线性调节器。这种控制方法要事先设定模型的准确参数,然而列车设备包括制动系统等容易出现磨损和老化,这使得模型参数呈现动态变化[2]。因为它依赖于工厂模型,所以它对真实参数的变化和扰动是敏感的,如对电动和负载的惯性变化。
模糊控制[3]是用机器来模拟经验丰富的司机进行驾驶,通过质变或模糊知识来达到良好的控制结果。但对延时大的系统,模糊控制有一定的缺点,这时可通过引进预测控制[4]来解决,它通过估计下一时刻的安全度、舒适度、运行速度、停车精度、运行时间、节能等指标,选择决定要实施的控制量。
专家控制系统[5]是一种模拟人类专家解决领域问题的计算机程序系统。该系统比较适合于过程复杂、影响因素较多的控制过程。它具有全面性、时空无限制性、稳定性和廉价性等优点。不足之处在于知识获取主要依靠人工移植,且只能在相当窄的专业知识领域内解专门性的问题,推理能力也较弱。
滑模控制[6]是不连续的,这表现了时变系统结构的开关特性。这与传统控制方式本质不同。这种控制能够在与系统参数和扰动无关的条件下,可使系统做一些小的放大和自上而下的高频变动。滑模控制[7]具有鲁棒性好、性能稳定的特点,但普遍存在震颤现象。
以上几种控制算法均可以在一定情况下各自达到所需的控制目的,滑模控制与制动系统最相似,若以一定方式结合其它控制模型将其应用于ATO 控制,停车精度和舒适度将会得到大大改善。
3 ATO 停车模型的建立
初始模型:在理想情况下,参考加速度直接作用于车上,如图1所示。

图1 初始模型
上述模型有以下几个问题需要考虑:
①对列车默认反应不稳定;
②对运行阻力或默认坡度不稳定;
③只有参考加速度控制误差。
所以,该模型需要增加一个校正器。
模型 1:前馈+ PI 校正器(见图2)。
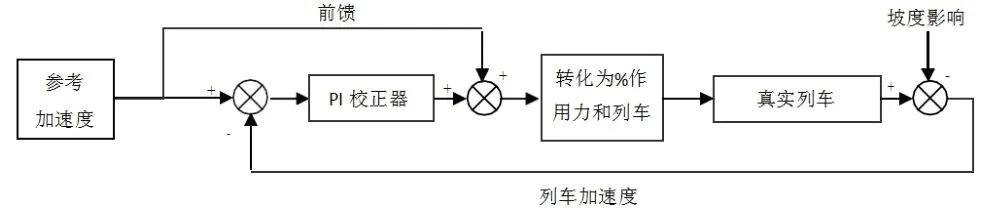
图2 模型 1
增加前馈可以使控制更加准确。
在增加了前馈和PI 校正器后还有以下问题:
①对列车容量限制和行为不稳定;
②可能导致不稳定命令。
所以还需要增加一个列车追踪模型。
模型2:追踪+前馈+ PI 校正器(见图3)。
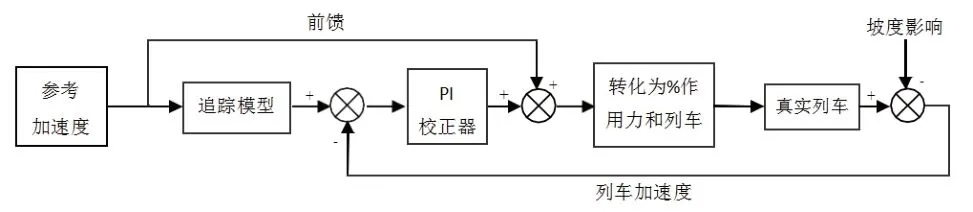
图3 模型2
在增加了追踪模型后,还有以下问题:
①校正会干扰转换阶段(通过转换延时);
②在转换时校正将受限;
③低速调整不稳定。
所以还需增加鲁棒控制。
模型3: 史密斯预估器+前馈+PI 校正器(见图4)。
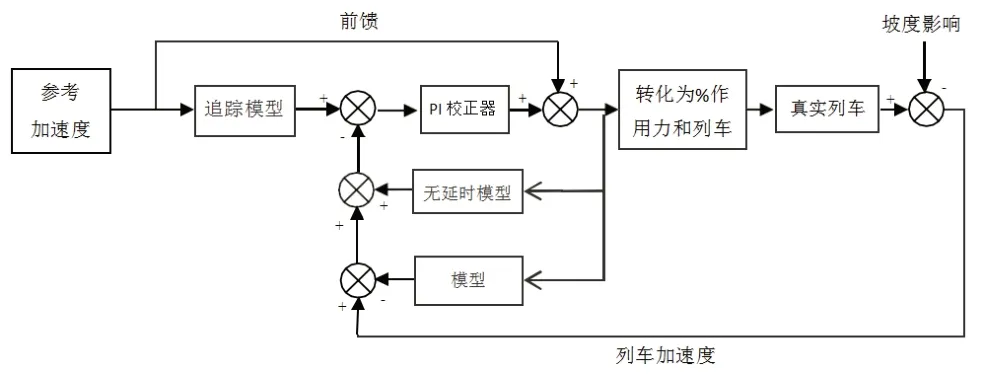
图4 模型3
鲁棒控制:史密斯预估器的引入将很好地补偿了系统的纯滞后特性,提高了系统的稳定性和动态性能。
在调整参数时,PI 校正增益可以更多一些,以获得更好的鲁棒性[8]。
4 结语
论文在对比了常见的几种 ATO 控制算法后,根据ATO控制的特点和要求,由简至繁,由浅到深,逐步建立了一种基于滑模控制算法的 ATO 控制模型,并通过加入 PI 校正器、前馈、史密斯预估器不断调整控制效果,最终实现精确停车的目的。该模型是概念型的,后续将通过 MutLab 模拟仿真作进一步研究。