水利施工构件随动式视觉检测装置设计
2021-08-20曾杰华梁健
曾杰华 梁健
摘要:对现有水利施工构件的检测方式进行深入研究,针对其只能抽检,无法实现所有工件全检的缺点,研发出一种随动式视觉检测装置,详述了其设计方案、关键结构及技术原理。装置配置有回转式物料输送及翻转系统,可实现物料稳定输送及自动翻转;配置随动式自动定位视觉检测系统,其上的视觉采集装置可同步跟随物料以相同速度一起前进,实现摄像头相对物料保持静止,并对其实施360°无死角的全方位视觉扫描检测,以便于检测工件的所有细节,避免出现漏检的情况。这样就可以精确检测施工构件的外观参数,以判断其是否合格。
关键词:水利;构件;随动式;视觉检测;设计原理
中图分类号:TP274文献标志码:A文章编号:1009-9492(2021)11-0240-03
Design of Follow-up Visual Inspection Device for Hydraulic Construction Components
Zeng Jiehua1,Liang Jian2
(1. Guangdong Yuantian Engineering Co., Ltd., Guangzhou 511338, China;2. Guangdong Water Conservancy and Electric Power Vocational and Technical College, Guangzhou 510925, China)
Abstract: The existing inspection methods of water conservancy construction components were deeply studied. In view of the disadvantagethat it can only spot check and can not realize the full inspection of all workpieces, a follow-up visual inspection device was developed, and itsdesign scheme, key structure and technical principle were described in detail. The device was equipped with a rotary material conveying andturnover system, which could realize stable material conveying and automatic turnover. It was equipped with a follow-up automatic positioningvisual detection system, on which the visual acquisition device could synchronously follow the material at the same speed, so as to keep thecamera stationary relative to the material, and implement 360° omni-directional visual scanning detection without dead angle, so as to facilitatethe detection of all details of the workpiece and avoid missing inspection. In this way, the appearance parameters of construction componentscan be accurately detected to judge whether they are qualified or not.
Key words: hydraulic; component; follow-up; visual inspection; design principle
0 引言
水利水電建筑等常规的建筑施工中,经常需要用到很多不同材质、形状各异的标准化构件,如:钢构件、水泥构件、塑料构件等。这些标准化构件在安装使用前必须检测其相关参数是否达标,如外观缺陷、尺寸参数、防火涂层、防锈处理等等。因为需要检测的零件多且检测工艺繁琐,很多时候都只能在批量的零件中抽检,无法实现对所有零件实施检测,这样就会造成有缺陷的零件无法被检测出来,从而影响施工工程的质量。
视觉检测就是用摄像头代替人眼来进行检测,它是指通过机器的摄像头将被检测物体的外形转换成模拟信号,传送给专用的图像处理系统,然后该系统再把图像中像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。采用该方式在对工件的尺寸或外观等方面进行检测,相对传统的人工检测具有快速、准确、高效等优点。
针对以上问题,本文设计了一种用于在检测时能够对所有的标准化构件都进行的外观缺陷、尺寸参数、防火涂层、防锈处理进行精密检测的随动式视觉检测装置。通过机器的摄像头对目标进行随动式视觉检测,相对传统的人工检测具有快速、准确、高效等优点,可以对每一个工件都进行详细的检测[1]。
1 设计方案制定
1.1 总体设计
本项目的设计思路是在视觉检测时通过回转平台把检测摄像头与工件一起做回转运动,使其两者在做同时同向运动中保持相对不动或可控的相对运动,实现摄像头对所有被送到输送带上的工件进行运动中的静止检测或扫描检测。摄像头完成检测后又能回到初始位置对下一个工件进行检测,这样就能使检测系统能够对连续输送的工件进行检测,又能保证检测时摄像头相对工件是静止的或做可控的相对运动[2]。这样就能达到既集中静止检测及动态检测的优点,又剔除其缺点的目的。同时通过配置专门设计的翻转装置,配合专用的多角度摄像头,可以对工件的每一个表面的外观进行详细检测,以保证高速、高效、高精度的检测效果[3]。
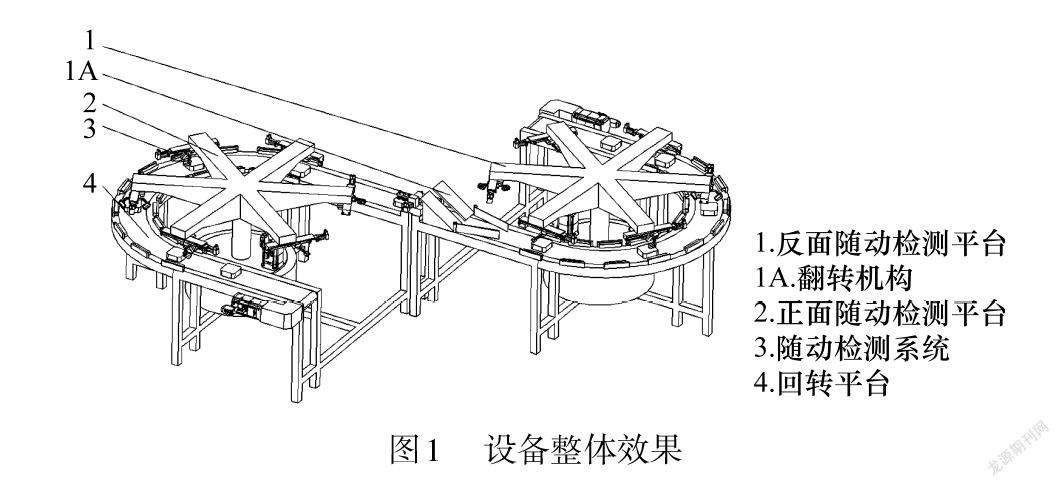
如图1所示,整套检测装置由反面随动检测平台1、翻转机构1A 、正面随动检测平台2、随动检测系统3和回转平台4组成。正、反面随动检测平台的结构一样,主要用于视觉检测系统的安装,通过均匀分布的检测臂跟随工件移动,同时进行检测[4]。工作时通过回转平台上的传感器传来的信号控制伺服电机的转速及角度,使检测系统对工件进行随动视觉检测。
1.2 翻转机构设计
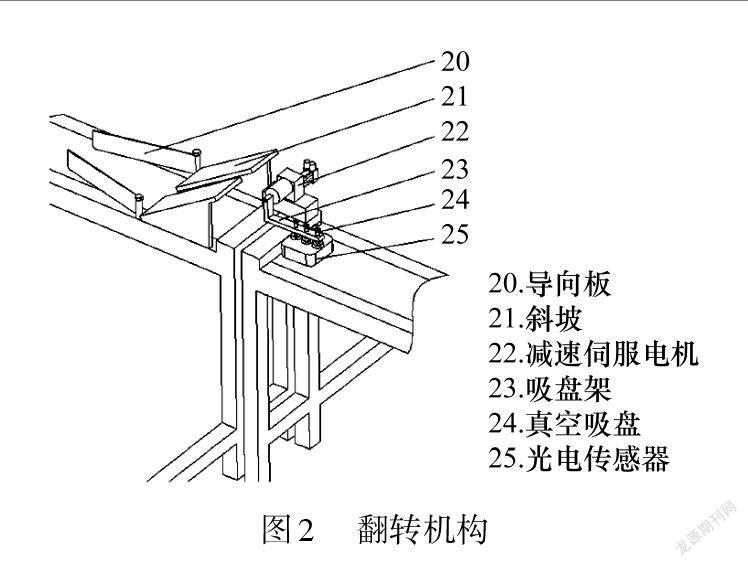
翻转机构如图2所示,用于把工件180°翻转,以便于反面随动检测平台对工件的背面进行检测。该机构由导向板20、斜坡21、减速伺服电机22、吸盘架23、真空吸盘24和光电传感器25组成[5]。工作时通过传感器25控制减速伺服电机22及真空吸盘24把输送到位的工件翻转180°,直接由正面随动检测平台送至反面随动检测平台,目的是把工件正面随动检测平台检测时朝下的那一面翻转朝上,便于反面随动检测平台对其进行检测[6]。当工件被输送带送至平台末端被挡板挡住,同时触发传感器25,传感器输出一个开关量信号控制减速伺服电机22带动吸盘架23,把真空吸盘24盖在工件 c表面上,同时吸盘吸气把工件整个提起,然后减速伺服电机22带动吸盘架23转动135°,把工件送至斜坡21上,减速伺服电机22上编码器检测主轴转动135°的同时输出一个开关量信号控制真空吸盘24放气,把工件松开,然后工件就会在45°斜坡的作用下向下滑动至反面随动检测平台的输送带上,被输送带带着往前输送,导向板20的作用是调整工件的姿态,使其摆正方向与输送带一起作逆时针运动。
1.3 随动检测平台
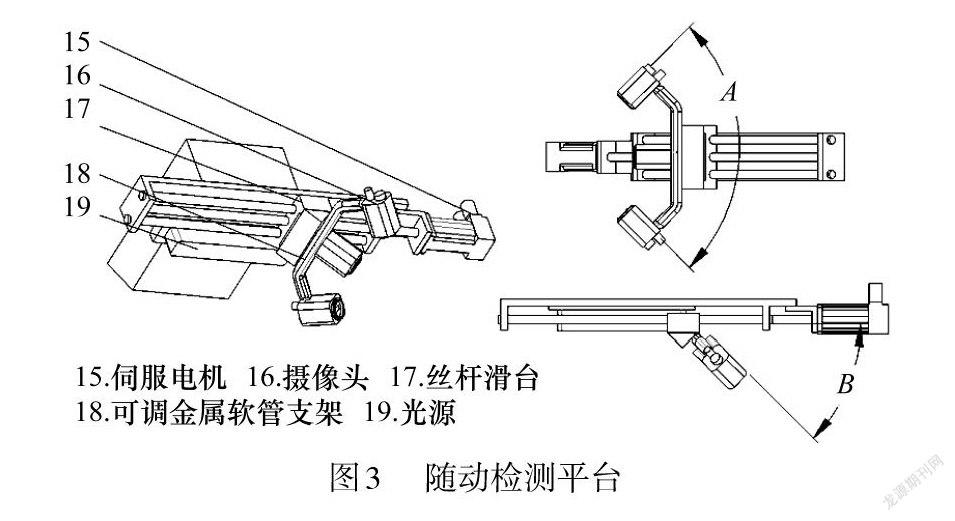
随动检测平台把视觉检测摄像头安装在丝杆滑台上,然后通过控制丝杆滑台的移动实现对工件的实时扫描检测。该系统由伺服电机15、摄像头16、丝杆滑台17、可调金属软管支架18、光源19组成。如图3所示,摄像头通过可调金属软管支架与丝杆滑台联接,摄像头之间的夹角 A 、摄像头与水平线的夹角 B 均可按需要在0°~180°之间调整,以满足不同的检测需要。检测时丝杆滑台当回转平台上的传感器7检测到工件到位时,随动检测平台把随动检测系统送至工件正上方,跟随工件一起往前移动,同时丝杆滑台带动摄像头对工件的上表面、左右侧面、前侧面进行扫描检测[7-8]。
1.4 回转随动平台
如图4所示,回转平台主要用于工件的输送。主要由工件4、光源5、输送皮带6、传感器7、伺服减速机8、机架9组成。本平台工作时主要通过输送带带动工件进行回转输送,每两个工件之间的距离相等,当工件触发传感器7时,传感器的信号记录工件相对传感器的位置,同时还标定工件相对将要对其进行检测的摄像头的相对位置,通过匹配伺服减速机8与随动检测平台伺服驱动电机13的转速,同时还驱动丝杆滑台调动摄像头做相应的匹配,使随动检测系统能够与工件以相同的角速度一起顺时针往前移动,同时控制摄像头对工件进行同步扫描检测[9]。
1.5 视觉检测系统
如图5所示,工作时:首先工件被一个一个间隔着的送到正面随动检测平台的输送皮带6上,工件相互之间的距离相等,该距离与随动检测平台上检测臂10末端相互間的距离一样,以保证随动检测系统运动时能针对每一个工件进行检测。接着工件会被输送带带着往前输送,做顺时针回转运动。第一个工件进入输送带并往前输送,当传感器7检测到该工件进入检测环节时,伺服驱动电机13通过变速箱14驱动主轴12带动检测臂10把随动检测系统11带到工件的正上方。因为工件相对摄像头的位置已经被标定,这时丝杆滑台控制摄像头运动对工件的其中 a 、b 、c 、d 四个面进行扫描检测,e、f两个表面待工件进入反面随动检测平台时检测[10]。从传感器检测工件到位开始,直到工件被输送带顺时针输送180°结束,丝杆滑台控制摄像头刚好对工件 a 、b 、c 、d 四个面扫描检测一次,然后丝杆滑台带着摄像头被检测臂10带着回转离开检测区域,在非检测区域回转时丝杆滑台控制摄像头回到原点位置,以便于进行下一次检测。
反面随动检测平台的结构及工作原理与正面随动检测平台一样,当该平台上的传感器检测工件到位后通过控制丝杆滑台上的摄像头对工件进行随动扫描检测。这时随动检测系统对工件的 b 、d 、e、f 四个面进行扫描检测,这样就实现了对一个工件的所有表面进行360°全方面连续在线视觉检测。
2 创新点
(1) 通过两个伺服电机的控制回转平台与随动检测平台相互配合,使移动中的丝杆滑台与工件在运动中保持相对静止,然后再通过控制丝杆螺母的配合使摄像头相对工件进行可控的相对运动,从而实现摄像头对所有被送到输送带上的工件进行运动中的静止检测或扫描检测。这样既能吸取静态检测效果好、精度高的好处,又能保证期具有动态测量速度快、效率高的优点[11]。
(2) 通过配置高效简单的真空吸盘翻转机构,快速地把工件翻转180°,从而实现了高速、高效的连续在线测量。
(3) 通过安装多组对称的摄像头在检测臂的两端,使其在回转过程中不断地检测与复位,实现连续不断地对送进输送皮带的工件进行在线检测,提高了检测的效率。3结束语
本文详细介绍了通过回转平台带动随动式视觉检测系统对施工构件进行检测的设计方案,该设计通过配置不同的传感器及控制逻辑,可以调整摄像头检测的状态,如同步静止检测、单向扫描式检测、来回扫描检测等;通过更换不同的检测装置还能对施工构件进行超声波探伤、金属检测、含水量检测等。其可塑性及互换性强,通过项目成果的进一步开发研究,本技术还可以拓展到其他的检测领域,对机械零件或产品外观等进行高速、连续、在线的检测,进一步为制造业生产线上的制造末端检测提供技术基础[12]。
参考文献:
[1]梁健.随动式视觉检测机构设计[J].机电工程技术,2017,46(7):68-69.
[2]梁健.一种随动回转式视觉检测装置:CN106197273A [P].2016-12-07.
[3]王耀南, 陈铁健,贺振东,等.智能制造装备视觉检测控制方法综述[J].控制理论与应用,2015,32(3):273-286.
[4]景慧昀.视觉显著性检测关键技术研究[D].哈尔滨:哈尔滨工业大学,2014.
[5]黄俊锋.用于工业机器人自动插线系统的视觉识别与定位关键技术研究[D].广州:华南理工大学,2020.
[6]李野.基于视觉随动技术的工业机器人应用研究[J].内燃机与配件,2020(18):197-198.
[7]熊中平,赵苏玲,王约发.钢管柱与混凝土组合构件节点连接施工新技术[J].工程与试验,2021,61(3):85-87.
[8]王玲玲,李曼,王永昌.火灾下膨胀型钢结构防火涂层的破损及其对钢构件升温过程的影响[J].建筑钢结构进展,2021,23(7):76-83.
[9]郑西点,杨雄飞,庄园.基于视觉引导的轮胎随动装配系统设计[J].工业技术创新,2021,8(3):21-26.
[10]师帅.轨道交通系统主动障碍物检测研究综述[J].机电工程技术,2021,50(6):212-216.
[11]刘永豪, 闫熙臣,范新杰,等.某建筑钢结构检测鉴定分析[J].建筑技术开发,2021,48(6):11-12.
[12]张兵, 蒋子良,黄华,等.电液双缸系统同步控制[J].液压与气动,2021(2):30-35.
第一作者简介:曾杰华(1980-),女,广东信宜人,大学本科,工程师,研究领域为水利机电技术。
(编辑:王智圣)
