基于法矢跟踪的人工膝关节测量方法研究
2021-08-18朱琳琳杨旭东张效栋
李 琛,朱琳琳,杨旭东,刘 磊,张效栋
天津大学精密测试技术及仪器国家重点实验室,天津大学微纳制造实验室,天津 300072
1 引 言
全球关节病患者每年对全膝关节置换手术的需求日益增加,全膝关节置换术是使用人工膝关节去替换患者病变的膝关节,从而改善病情。人工膝关节是根据患者自身关节形状采用钛合金、氧化锆陶瓷等生物材料仿制加工而成[1],其面型偏差会直接影响患者的治疗效果,因此在实际生产应用中需要对人工膝关节面型进行高精度评价。人工膝关节几何尺寸较大、面型复杂,由两个不规则的扇环面和连接部分组成,在矢状面上的面型倾角变化超过120°,冠状面上面型倾角变化在16°左右[2-4],并且不同患者的膝关节面型存在较大差异,没有统一的数学模型,难以用数学方程进行描述。人工膝关节面型的复杂性和未知性导致其在加工完成后缺少一种有效的测量方法,无法正确评价面型制造质量,限制了人工膝关节的制造发展。因此,急需一种测量方法能够实现人工膝关节面型轮廓准确测量与评价。
目前适用于人工膝关节面型测量的商用仪器有普雷茨特公司基于Redlux 彩色共焦测头研制的非接触式CMM,可以实现对人工膝关节表面的高精度测量,但是该测量设备机械结构复杂、造价昂贵[5]。此外,人工膝关节面型复杂非回转对称,且表面没有辅助定位的几何结构特征导致其在测量坐标系中空间位姿难以确定,因此人工膝关节面型测量可归类为复杂未知曲面测量问题。针对该类测量问题,现有的测量方法主要分为两类:第一类采用激光器与CCD 相结合,基于光线追踪理论实现未知曲面测量,例如Kudo,Binkele 等[6-7]学者设计的未知非球面测量系统,测量过程中根据入射光斑和出射光斑在CCD 上的相对位置来解算采样点的空间法矢方向,从而实时调整系统使其沿着采样点法矢方向进行采样。受CCD 靶面尺寸的限制,该方法只能测量矢状面和冠状面上倾角变化在10°以内的未知曲面,其测量误差在亚微米级别;第二类通过在测量系统中耦合多传感器采用轮廓认知方法实现未知曲面测量,例如卢科青等[8-9]人采用多传感器融合的探路采样方法,在三坐标测量系统的接触式测头两侧各安装一个点激光测头形成复合测头,利用激光测头对待测件三维轮廓进行认知,随后控制接触式测头对认知区域进行精准采样实现对未知曲面的测量,该方法算法实现简单,测量精度较高,但是该测量系统缺乏转动自由度,测量范围受限于复合测头的角度特性,可实现对矢状面和冠状面内倾角变化均20°以内的未知曲面自适应采样。综上可知,现有复杂未知曲面测量方法均难以适用于人工膝关节这种矢状面和冠状面上倾角变化大的面型测量,传统直角坐标形式的测量方法受限传感器的工作距离及角度特性,无法通过单次连续测量获取完整的表面三维数据,需要进行多次改变待测件的测量位姿,对其表面进行分区域测量,通过数据拼接手段将表面不同区域的数据进行整合得到完整的表面信息,但是人工膝关节表面形状特征不明显会引入较大的拼接误差,极大地影响测量精度[10-11]。点扫描测量是灵活性、自由度最高的一种测量方法,任何复杂的曲面均可由点进行表征构成[13-14],因此多自由度CMM 坐标点扫描测量方法是当下较成熟的表面轮廓测量手段。测量过程中,根据采样点的空间坐标和法矢方向,实时调整传感器与待测件的相对位姿,使采样区域满足传感器的角度特性和工作距离,从而消除传感器测量盲区实现复杂面型的完整测量。现有点传感器可根据工作原理分为光学非接触点传感器和接触式位移传感器,其中光学非接触点传感器其角度特性有限,例如法国STL 公司OP系列彩色共聚焦测头的最大角度特性为±25°,并且光学传感器多依赖于光纤传输信号,对外界环境波动敏感,应用于多自由度测量系统时易受外界系统振动等条件影响,导致测量数据存在较多的噪声点,对测量精度有较大影响[12-14],而接触式位移传感器,例如直线位移传感器(linear displacement sensor,LVDT),具有信号抗噪性良好、角度特性大等优势,可以较好地适用于多自由度CMM。因此,采用多自由度运动机构搭载LVDT 实现人工膝关节面型自适应测量是极具研究价值的。
针对上述人工膝关节表面轮廓测量难题,本文重点提出了基于法矢跟踪的表面轮廓测量方法,并设计搭建基于LVDT 回转扫描测量系统,为人工膝关节面型测量评价提供了一套切实可行的测量方法。该方法通过对已测点进行高次曲线拟合,根据拟合曲线的特性参数预测曲面型变化趋势,自适应调整LVDT 的空间位姿和采样间隔,使LVDT 近似沿着采样点法矢方向进行采样,实现对人工膝关节表面的自适应回转测量,并通过实验验证了该方法的可行性。
2 人工膝关节法矢跟踪测量方法
本文研究过程如图1 所示,搭建了基于LVDT 回转扫描测量系统,该系统有四个方向的自由度:载物台有X、Y方向的平动自由度,LVDT 有Z方向平动和B方向转动自由度。基于等截面线法对人工膝关节进行测量路径规划[15-16],用一组等间距平行于XOZ平面组截待测曲面,通过对各截面线的测量即可获取待测件表面三维点云。各截面线的测量采用了法矢跟踪测量方法,该方法通过对已测点进行曲线拟合求取斜率、曲率等特性参数,根据这些参数预测待测区域法矢方向,调整LVDT 采样位姿,使其近似沿着采样点法矢方向采样,实现对大斜率变化截面线的自适应回转测量。然后基于相邻点夹角的去噪算法对点云中噪声点进行剔除,将处理后的点云与理论模型进行匹配,得到人工膝关节面型制造误差,从而实现对人工膝关节面型的高精度测量与评价。

图1 人工膝关节测量过程示意图Fig.1 Measurement process of artificial knee joint
3 基于法矢跟踪的面型测量方法
3.1 测量系统结构设计
人工膝关节面型回转扫描测量系统结构如图2 所示,综合考虑人工膝关节面型倾角变化和LVDT 角度特性,测量系统包含四个方向的自由度:X,Y,Z三个方向的平动自由度和B方向转动自由度。LVDT 通过夹具固定在转台上,并使其轴线通过转台回转轴线,定义两轴线的交点为控制点O。

图2 测量系统结构Fig.2 Measurement system structure
以控制点O起始位置为原点(0,0,0)构建测量坐标系,测量过程中通过各轴的位移量可得控制点O空间坐标(x,y,z)。根据LVDT 安装位置关系如图3 所示,可得采样点P坐标(x0,y0,z0)的计算式:

图3 采样点计算模型Fig.3 Calculation model of sampling points

式中:D为LVDT 示数为0 时控制点到探头底部的距离,h为LVDT 测得高度值,θ为LVDT 轴线与X轴的夹角。
3.2 法矢跟踪算法
面型法矢跟踪算法流程如图4 所示,整个面型的测量分成了对若干条截面线的法矢跟踪测量,单条截面线的测量过程主要分为:截面线初步认知和自适应跟随测量两步。

图4 面型法矢跟踪算法流程图Fig.4 Flowchart of normal vector tracking measurement
测量之前需要调整LVDT 初始位姿使其轴线竖直向下垂直于XOY平面,并将人工膝关节固定在载物台上使其矢状面近似平行于XOZ平面。为保证截面线初步认知区域内采样点均满足LVDT 角度特性,需要在待测件顶部较平坦处选取起始采样点,如图5 所示。记录起始采样点处LVDT 控制点坐标(x0,y0,z0),控制LVDT 按照初设采样步长d0沿X负方向等间距采样m个点,将这m个点的集合定义为数据集W0,记每个采样点为pi,n(下标i表示所在数据集的序号,n表示点在数据集中位置)。由于截面线起伏较大,在测量过程中需要辅助自动调整算法[17-18],根据测得高度值判断LVDT 相对于待测件的运动趋势,实时调整LVDT轴线方向的高度,使测量过程中采样点位于LVDT 的量程范围内,通过对数据集W0的采样实现截面线的初步认知。

图5 截面线初始认知原理图Fig.5 Initial cognition of section curve
为了预测面型变化趋势实现对未知区域的自适应跟踪测量,需要获得截面线斜率、曲率等参数,因此对离散采样点进行曲线拟合,根据拟合曲线的数学表达式进而计算出相关特性参数。由于人工膝关节截面线变化连续无明显折点,因此选用多项式进行曲线拟合,多项式阶数越高拟合结果越精确,包含更多的高频信息,但是拟合算法计算量会极大增加,导致测量效率过低,经过多次实验对比,选用四次多项式进行曲线拟合。四次曲线不仅可以准确拟合截面线,还能滤掉截面线上高频信息对截面线斜率计算的干扰,提高跟随算法的适用性,基于最小二乘的k次多项式拟合公式:

式中:xi为第i个采样点x坐标,ai为多项式系数,yi为第i个采样点z坐标。

式中:f′(x)表示高次曲线f(x)的一阶导数,f′(x)表示高次曲线f(x)的二阶导数,R表示高次曲线f(x)横坐标取x时的曲率半径[19]。根据该公式可以求出拟合曲线在数据集W0中起点p0,0处切线l0的斜率k0和曲率半径R0,0,终点p0,m处切线lm的斜率km和曲率半径R0,m。由于曲面变化是连续的,在较小的测量区域内,截面线斜率和曲率变化微小,因此可以近似认为截面线是按照切线方向进行外延。为了保证后续测量过程中,LVDT 可以近似按照被测点法矢方向进行测量,需要调整LVDT 位姿使其轴线以垂直于lm,垂足为p0,m,如图6 所示。

图6 LVDT 位姿调整示意图Fig.6 Pose adjustment of LVDT
调整后的LVDT 轴线与Z轴夹角β和控制点坐标(xc,yc,zc)计算式:

为了防止在LVDT 调整过程中与物体发生碰撞,式(4)中D为LVDT 未接触待测物状态下控制点到LVDT 末端的距离,k为垂足点pi,m的切线斜率,(xi,m,yi,m,zi,m)为垂足点pi,m的坐标。LVDT 调整到位后,沿LVDT 轴向调整控制点,使垂足点pi,m位于LVDT 量程范围内。
采样步长会影响测量精度和效率,为了实现对面型的高效高精度测量,下一数据集的采样步长需要根据截面线曲率变化进行调整,在曲率较小处采样步长应适当增加提高测量效率,曲率较大处采样步长缩小增加采样密度,防止面型信息的丢失,数据集的采样步长计算式:

式中:q为步距调整阈值,Rm为数据集Wi-1第m个采样点处的曲率半径(i≥1),dmax为最大采样步长,d0为初始采样步长,di为第i个数据集的采样步长,R0,min为数据集W0内最小的曲率半径,其中q取值范围为正有理数,q的取值越大,采样步长分段越精细,获取的采样点数越多,截面线点云包含的结构信息越多,测量效率会有所降低,因此需要根据待测件表面结构特征复杂程度设置合适阈值。对于面型曲率变化大的曲面应增大q避免面型信息的遗漏,对于面型曲率变化较小的曲面应适当减小q值提升采样效率。根据p0,m处的曲率半径可以计算下一采样区域的采样步长,随后控制LVDT 沿着切线lm朝X负向等间隔采样m个点,获得一个新数据集W1。通过新数据集末端采样点的切线斜率和曲率半径可以继续调整采样间隔和LVDT 空间位姿,实现对下一区域的采样,直至沿X负向采样完成,并设负向采集的最后一个数据集为Wn。然后对数据集W0正向截面线进行自适应测量。调整LVDT 位姿使其轴线以垂直于l0,垂足为p0,0,控制点的坐标可以通过式(4)求得。如图7 所示,在调整过程中为了避免LVDT 与待测物碰撞产生划伤,需要先调整LVDT 控制点z坐标,然后调整LVDT 控制点x坐标,最后控制转轴B使其垂直于l0,垂足为p0,0。通过p0,0处的曲率,按照式(5)求取下一数据集的采样步长dn+1,控制LVDT 沿着p0,0处切线方向沿X正方向等间隔采样m个点,获得新数据集Wn+1。根据新的数据集末端采样点的斜率和曲率可以继续调整采样间隔和LVDT 空间位姿,实现对下一数据集的采样,直至沿X正向采样完成。

图7 LVDT 转正向测量调整过程图Fig.7 Motion path of LVDT
通过上述步骤完整获取待测截面线的轮廓数据,随后控制LVDT 回到测量时的初始采样位置,根据截面线间隔Δy,控制LVDT 在Y方向进行平移,开始对下一截面线的测量,重复上述过程直至完成所有截面线的测量。
4 面型测量实验
基于本文提出的膝关节面型法矢跟踪测量方法搭建了回转扫描测量系统,其中 LVDT 采用的是Solartron metrology 公司的轻接触力弹簧驱动探头,其测量精度为1 μm,角度特性为±45°,以适应人工膝关节冠状面方向上的角度变化。为了验证该系统的测量准确度和面型法矢跟踪算法的可行性,对半径为12.703 mm 的标准白瓷球表面进行了五次面型跟踪测量实验,测量区域是X方向,圆心角为160°,Y方向弦长约为7.85 mm 的球环,标准白瓷球相关参数如表1 所示。

表1 标准球参数表Table 1 The parameter table of the standard ball
测量过程中控制点运动轨迹和测得截面线点云如图8(a)所示。将测得点云与理论模型匹配得到测量误差分布如图8(b),可知测量系统存在一定的系统误差。随着轴系位移量增加,系统运动误差逐渐累积,导致测量系统在顶部较平坦区域测量误差较小,而在边界区域测量误差偏大。测得标准球面型标准偏差(RMSE)如表2 所示,可得系统的测量误差约为48.21 μm。

表2 标准球测量结果表Table 2 Measuring result of standard ball measuring results of standard ball

图8 标准球测量结果。(a)截面线数据;(b)测量误差分布Fig.8 Measuring results of standard ball.(a)Section curve data;(b)Measurement error distribution
为了验证本文提出的方法对人工膝关节测量的可行性,搭建回转扫描系统对3D 打印的人工膝关节模型件进行了测量实验,如图9 所示。

图9 人工膝关节测量系统实物图Fig.9 Measurement experiment of artificial knee joint
根据本文提出的法矢跟踪测量方法,人工膝关节的测量参数如表3 所示。测量过程中,控制点运动轨迹和测得截面线点云数据如图10 所示。

图10 截面线测量数据Fig.10 Measurement data of section line

表3 人工膝关节测量参数表Table 3 Measurement parameter table of artificial knee joint
人工膝关节面型测量实验中,由于环境干扰和测量系统误差,测得截面线点云数据存在噪声点,如图11(a)所示。为了提高面型评价的准确度,需要先对点云进行去噪处理,去噪方法如下:设点集{pi},若第i个点pi与前后两点pi-1,pi+1连线的夹角t小于预设值t0,则判断pi为噪声点给予剔除,否则为合理采样点。t0取值过大,会导致去噪后的截面线趋于平滑,损失较多的表面结构信息;t0取值过小则会导致噪声剔出率降低,因此需要根据截面线点云轮廓特征调整选取合适的t0值[20-21]。在本实验中当t0=70°时,截面线去噪效果较好并且轮廓信息保存完整,去噪结果如图11(b)所示。
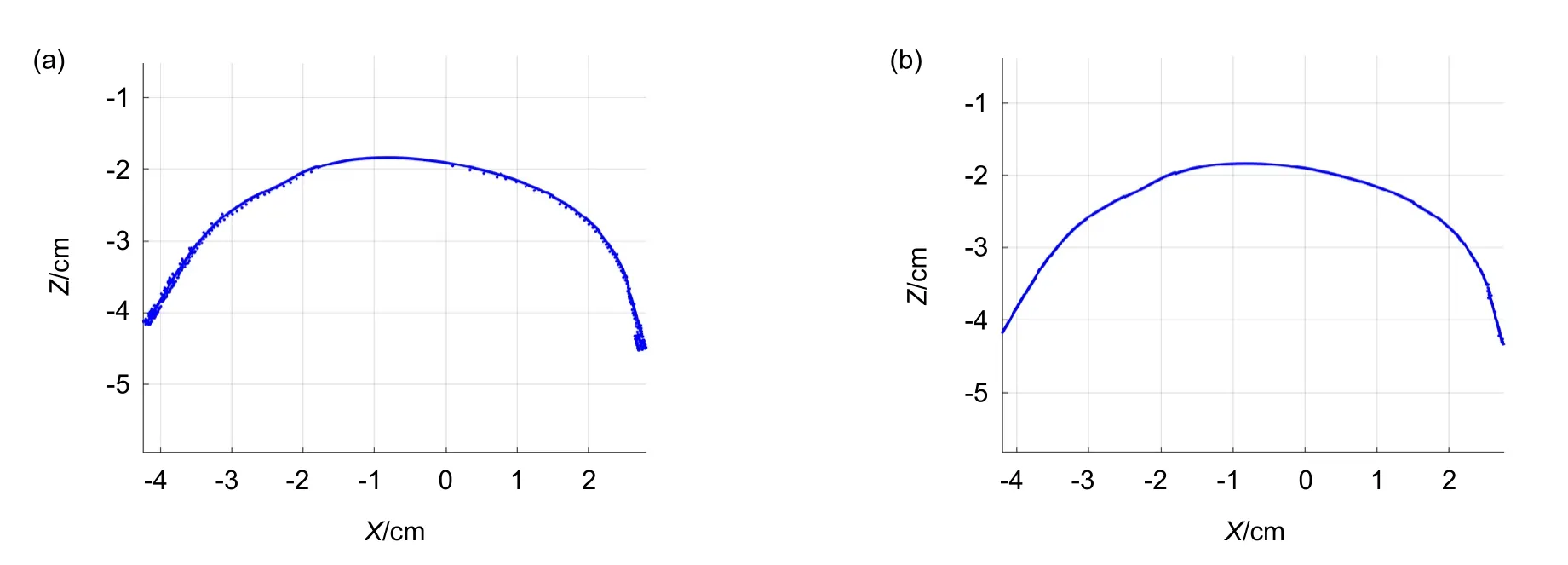
图11 截面线数据去噪处理。(a)原始数据;(b)去噪后数据Fig.11 Data processing of section line.(a)Origin data;(b)Data after denoising
测得人工膝关节表面点云的数据如图12(a)所示,由于人工膝关节表面空洞区域附近截面线不连续,测量过程中会发生测头位姿突变,存在卡住、撞坏测头的危险,因此只对膝关节表面主要受力区域的面型进行测量与评价,未测量空洞附近的表面区域。测得点云X方向上的尺寸约为68.33 mm,Y方向上的尺寸约为56.21 mm,Z方向上的尺寸约为58.79 mm。将测得三维点云与理论模型进行匹配,匹配结果如图12(b)所示,测量面型标准偏差RMSE=199.84 μm。根据误差分布可知该模型中部凹陷处、边缘等斜率大的区域制造误差较大。通过该实验验证了本文所提测量方法可以有效实现对人工膝关节这种未知、面型倾角变化复杂曲面的自适应回转测量,为人工膝关节制造提供了可靠的测评结果,能够指导制造工艺进一步提升,对膝关节医疗领域起到一定的推动作用。

图12 人工膝关节测量结果。(a)点云数据;(b)面型评价Fig.12 Measuring result of artificial knee joint.(a)Points cloud data;(b)Surface-shape error
5 总结
针对人工膝关节制造过程中的测量需求,本文重点提出了一种基于法矢跟踪的测量方法,实现对人工膝关节表面的自适应回转测量,为人工膝关节测量难题提供一种切实可行的解决方案。主要结论:
1)搭建了回转点扫描测量系统,实现人工膝关节模型件的自适应回转测量,并通过标准球的测量评价了系统测量误差。
2)提出了基于法矢跟踪的未知曲面测量算法,采用四次多项式对已测点进行曲线拟合,能够较准确地预测曲面法矢变化趋势,通过LVDT 位姿调整实现近法矢方向采样测量,并能根据测量表面采样区域的曲率变化,自适应改变采样间距,提高人工膝关节面型的测量精度和效率。
3)通过实验测量人工膝关节模型件,将处理后的测量数据与理论模型进行匹配,得到模型件的面型标准偏差RMSE=199.84 μm。
值得声明的是,本文目前尚未对测量系统进行误差建模和补偿,并且受限于系统硬件条件,因此实验测量结果包含较大的系统误差。该问题是后期的研究重点,我们将研究系统误差建模与补偿,继续改进优化测量方法来提高人工膝关节面型的测量精度,为人工膝关节制造产业的测量应用不断努力。