全电子联锁道岔模块复位控制系统的设计与实现
2021-08-17谢智多孙瑞
谢智多,孙瑞
某城市轨道交通线路全电子联锁系统,在运营使用过程中有时会发生因道岔模块死机故障导致道岔无法正常操动的问题。当发生故障时,通常需对道岔模块进行手动复位操作,才能使道岔操动恢复正常。通过分析发现,瞬间检测不良可能是导致道岔模块死机的主要原因,但当前暂无有效的解决办法。由于地铁运营列车间隔时间短,道岔模块故障会对列车运行造成很大影响。为了最大限度地减小此类故障对运营的影响,地铁公司在各车站配备信号值班人员进行24 h值守,这不仅造成运营成本增加,也给信号设备维护人员带来很大的工作压力。因此,设计一套在道岔模块出现死机故障时能够及时快速发现、精准定位报警、远程控制复位的故障应急处理系统,是地铁公司的迫切需求[1-3]。
1 系统结构设计
道岔模块复位控制系统由中心服务器、控制终端、车站控制单元、通信单元及网络设备组成。系统结构见图1。
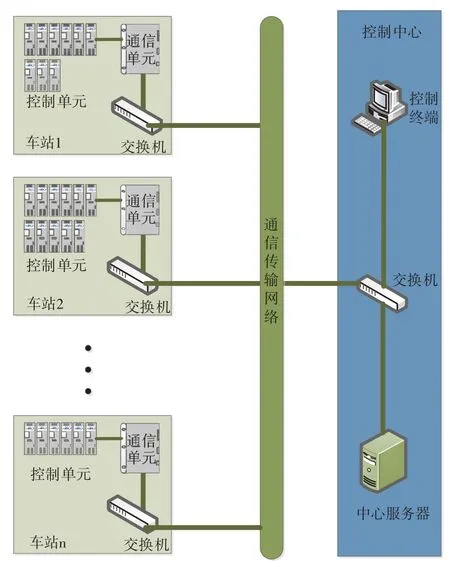
图1 道岔模块复位控制系统结构
道岔模块复位控制系统在每个车站设置1个通信单元,负责与中心服务器进行通信,接收复位控制命令并上传道岔模块状态信息;对应每个道岔模块设置1个控制单元,负责与车站通信单元通信,接收控制命令并上传道岔模块状态信息;中心服务器负责与各站通信单元通信,收集各站信息并下达控制命令;控制终端负责提供人机交互界面,并与中心服务器进行数据交互。
1.1 控制单元设计
1)设计方案。当道岔模块死机时,对应通道的故障指示灯点亮,因此可以通过实时监测故障指示灯状态,判断道岔模块是否出现死机故障[4]。当道岔模块故障时,通过控制单元的复位执行电路对道岔模块进行复位操作,等同于人为按压复位按钮。
为了提高故障指示灯状态采集的准确性,对每个通道的故障灯状态进行双路采集。由于每个道岔模块设有2条通道,因此每个控制单元设计4路故障指示灯状态采集电路。
为了满足信号产品对安全性能的要求,复位执行电路采用双脉冲控制电路加无触点开关的方式执行复位操作。通过对脉冲控制电路进行周期性自检,可及时发现复位执行电路的故障,并报送给复位控制系统的中心服务器[5-6]。
控制单元将采集到的故障指示灯及自身的工作状态信息通过CAN总线发送给通信单元,通信单元通过以太网将信息传送给中心服务器,各控制终端可以通过中心服务器获取这些信息并进行展示。操作人员可根据报警提示确认是否需要进行复位操作,当选择复位操作时,系统下达控制命令给相应的控制单元,执行远程复位道岔模块的操作。
2)硬件原理。对故障指示灯状态的采集,可通过光电耦合器件和施密特触发电路,采集故障指示灯端电压,对波形进行整形处理后输出状态信号,这种方式对原电路的正常工作产生较小的影响[7]。
故障指示灯状态监测采用双路并联采样方式,这种采集方式可以保证当一路取样电路故障时不影响整体的采集功能[8]。同时,通过双路并联采集电路的相互校验,完成采样电路自检的功能。故障指示灯状态采集电路原理见图2。

图2 故障指示灯状态采集电路原理
当接收到复位操作命令时,控制单元通过脉冲信号控制复位信号动态隔离电源输出,使动态隔离电源1、动态隔离电源2同时工作,无触点开关K1、K2同时闭合,复位信号线与地线连通,通过将复位管脚电平拉低实现复位操作。复位控制电路原理见图3。
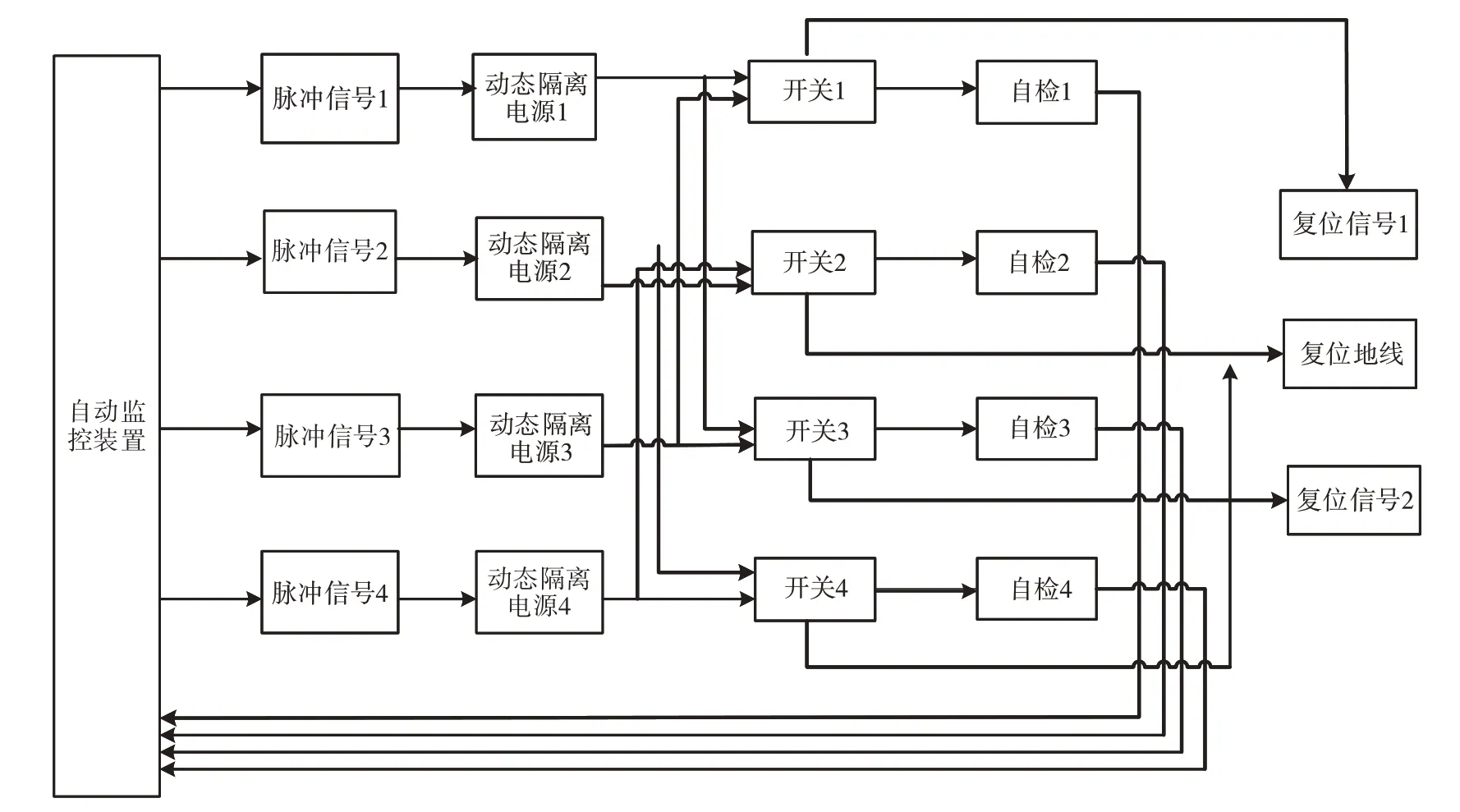
图3 复位控制电路原理
1.2 通信单元设计
通信单元由双CAN总线接口、以太网接口及MPU处理器等组成。
1)CAN总线。双CAN总线与复位控制单元组成CAN总线控制环,完成局部工业网功能,保证通信畅通和实时控制。
2)以太网接口。接收服务器下达的控制命令,通过CAN总线传达给相应的控制单元执行,并将执行的结果反馈给服务器。当无命令执行时,定时将所管理的控制单元的状态信息发送到中心服务器。
3)MPU处理器。将双CAN总线及网口实时紧密联系起来,完成信息的桥接及部分变量的暂存。
1.3 软件结构
根据道岔模块复位控制系统的特点,系统软件采用模块化设计,主要由终端软件、服务器软件和下位机软件3部分构成[9]。
1)终端软件。终端软件共设计7个模块:操作显示模块提供人机界面供操作人员使用,并将执行的结果进行展示;报警模块负责对道岔模块死机的信息进行记录和分析;用户管理模块负责处理用户管理、权限设置、密码设置、复位模式设置等操作;存储模块负责对报警信息及复位操作信息进行存储;统计模块负责对报警信息及复位操作信息按照车站、道岔、日期、次数进行统计;查询模块负责实现条件检索功能,可以按照类别、时间、车站、道岔等条件进行查询;通信处理模块负责与中心服务器进行通信,收发相关命令及信息。
2)服务器软件。服务器软件共设计4个模块:操作显示模块提供人机界面供操作人员使用,并将执行的结果进行展示;存储模块负责对报警信息及复位操作信息进行存储;分析处理模块负责分析处理与业务相关的信息;通信处理模块负责与终端进行通信,并将信息发送给下位机,同时接收下位机回送信息。
3)下位机软件。下位机软件共设计3个模块:通信处理模块负责与中心服务器进行通信;执行模块负责命令执行,将要执行的命令传送给复位电路,实现复位操作;控制处理模块将上位机传送来的命令传送给执行模块去执行、或者按照服务器下放的权限,根据采集到的故障指示灯状态自动判断操作时机。
4)数据流程图。道岔模块复位控制系统软件数据流程见图4。
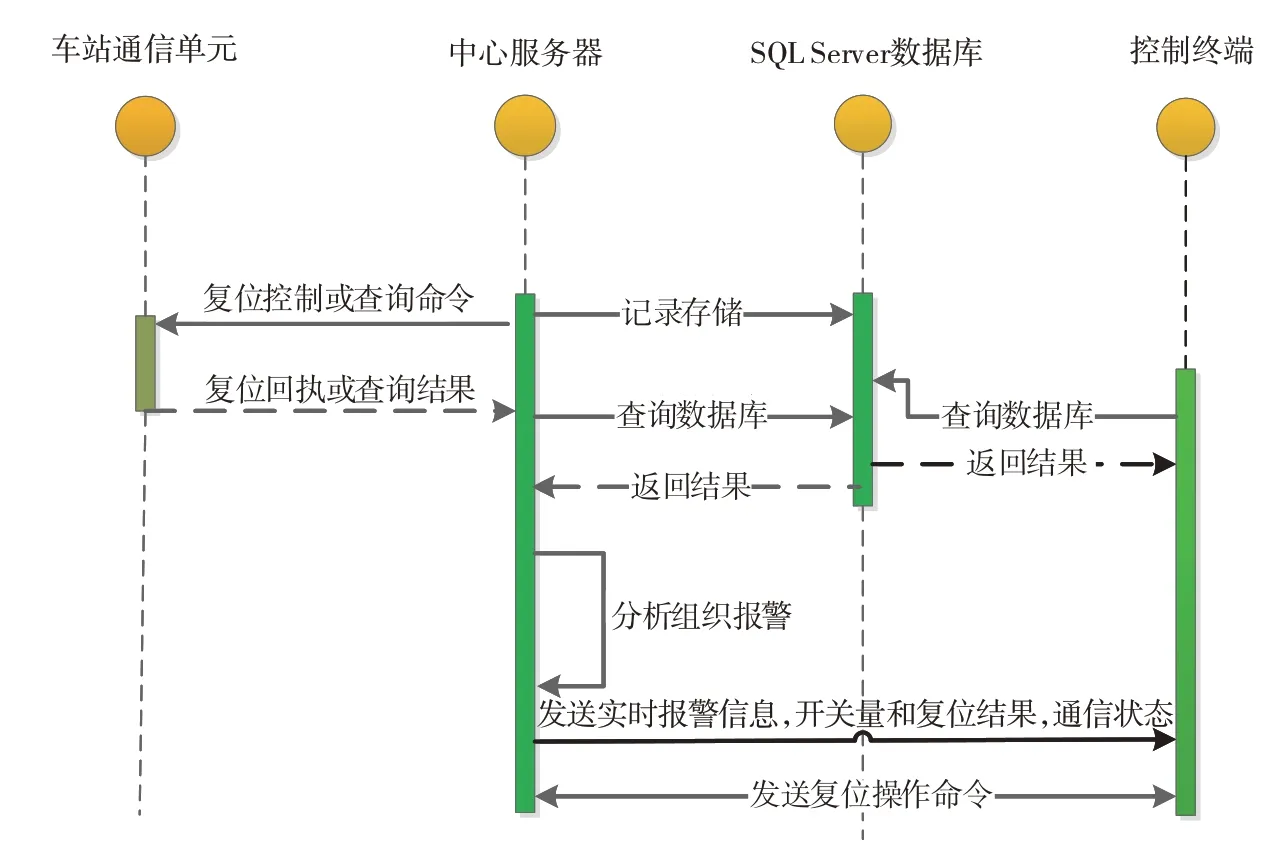
图4 系统软件数据流程
2 系统功能设计
1)故障自动报警功能。当控制单元检测到故障指示灯点亮时,自动将报警信息通过通信单元上传到中心服务器,由中心服务器分析处理后推送给各控制终端。
2)手动复位功能。信号设备维护人员通过控制终端查看报警信息,由具有控制权限的人员确认并发起复位操作命令,通过中心服务器处理后,经过通信单元下发到控制单元,并执行复位操作。
3)自动复位功能。在报警采集及复位操作被认定为可靠的情况下,由具有控制权限的人员在控制终端上设定自动复位功能,该功能可以在系统检测到报警后自动执行复位操作,同时将报警及复位操作信息记录下来,供运维人员查询。
4)用户管理功能。包括用户管理、密码设置、权限设置、复位模式设置等。
5)报警信息存储功能。系统对报警信息及复位操作信息进行存储,存储时间不小于1年。
6)统计功能。系统对报警信息及复位操作信息按照车站、道岔、日期、次数进行统计,并通过日、月、年报表的形式进行展示。
7)查询功能。系统支持条件检索功能,可以按照类别、时间、车站、道岔等条件进行查询。
3 管理流程设计
系统远程控制道岔模块复位操作管理流程[10]见图5。通过车站控制单元采集故障指示灯状态,采集信息实时上传中心服务器进行分析处理;当发现故障指示灯点亮时,向控制终端推送报警信息,由有操作权限的维护人员进行判断,如果是故障状态,则向车站下达复位操作命令,车站复位控制单元接收命令后执行复位操作。
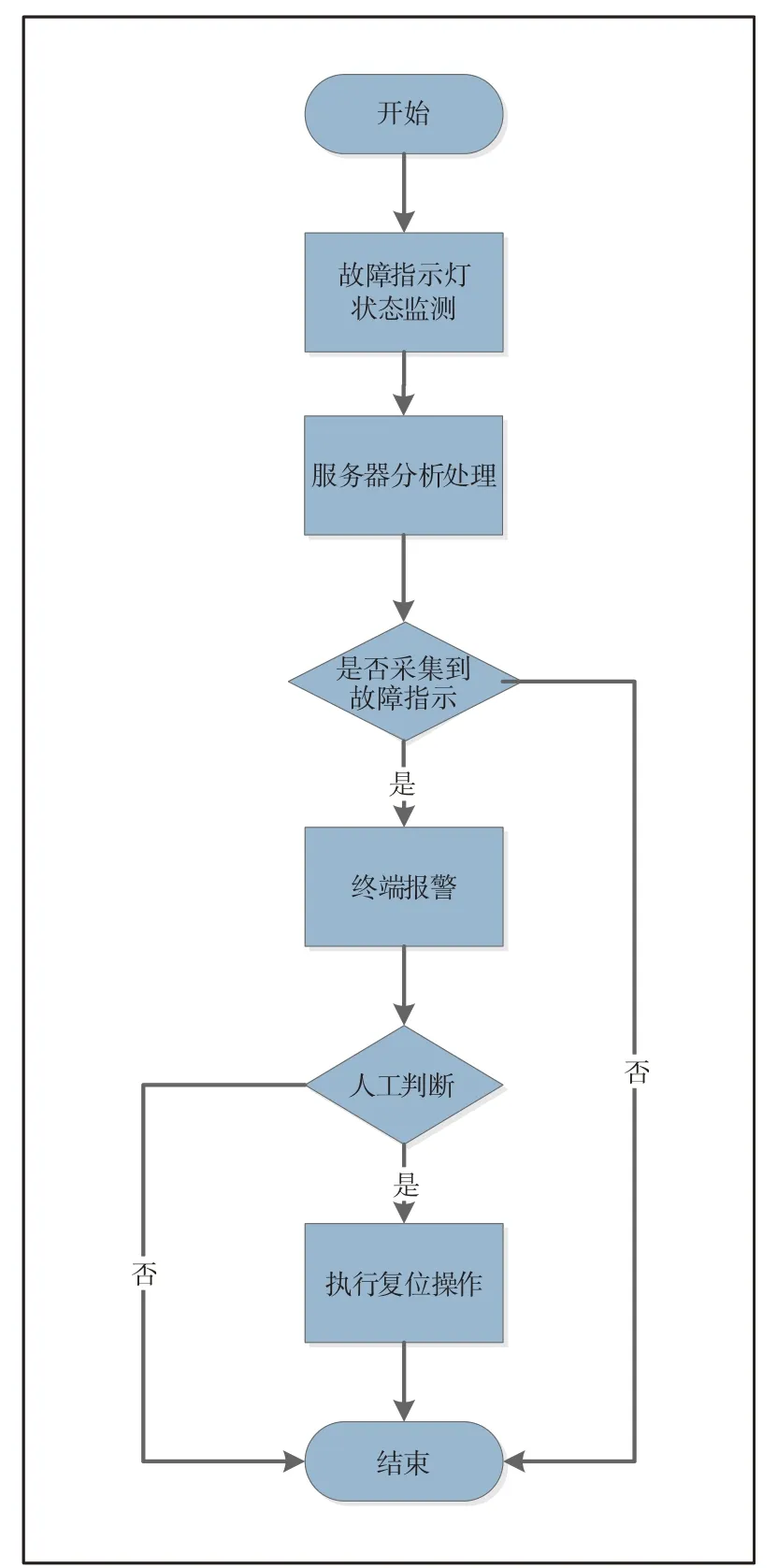
图5 复位操作流程图
4 结论
全电子联锁道岔模块复位控制系统是根据地铁运营公司对道岔模块死机故障快速复位的需求而设计的,该系统实现了道岔模块死机状态的准确识别、故障自动报警、手动复位、自动复位、报警存储、报警统计、报警查询等功能,能够满足道岔模块死机故障快速复位的需求,最大限度地缩短了运营过程中的故障处理时间。
