Neural Network Based Adaptive Tracking of Nonlinear Multi-Agent System
2021-08-16BoXianLinWeiHaoLiKaiYuQinXiChen
Bo-Xian Lin| Wei-Hao Li | Kai-Yu Qin | Xi Chen
Abstract—In this paper,the problems of robust consensus tracking control for the second-order multi-agent system with uncertain model parameters and nonlinear disturbances are considered.An adaptive control strategy is proposed to smooth the agent’s trajectory,and the neural network is constructed to estimate the system’s unknown components.The consensus conditions are demonstrated for tracking a leader with nonlinear dynamics under an adaptive control algorithm in the absence of model uncertainties.Then,the results are extended to the system with unknown time-varying disturbances by applying the neural network estimation to compensating for the uncertain parts of the agents’ models.Update laws are designed based on the Lyapunov function terms to ensure the effectiveness of robust control.Finally,the theoretical results are verified by numerical simulations,and a comparative experiment is conducted,showing that the trajectories generated by the proposed method exhibit less oscillation and converge faster.
1.Introduction
Recently,the cooperative control for multi-agent system has received compelling attention[1],it has broad applications in military surveillance[2],space exploration[3],underwater exploitation[4],disaster rescue[5],etc.One of the fundamental issues in cooperative control is consensus,and it means that all the agents approach the same state with a distributed control protocol.Kinds of literature have considered the consensus control of the multi-agent system with finite-time[6],measurement noise[7],switching topology[8]or controller saturation[9]methods.And in practice,such as satellite formation,unmanned aerial vehicle (UAV),swarm control or robotic manipulator control,the agent model will be complicated with nonlinear parts and unknown parameters.These factors bring difficulties to system analysis and stability,which is an urgent problem to be solved.
As a crucial issue,the adaptive control[10],sliding mode control (SMC)[11],uncertainty and disturbance estimator (UDE)[12],and other methods are used to solve the robustness problem of the nonlinear uncertain system.Reference [10] investigated the fault-tolerant tracking consensus problem with adaptive control.An adaptive fault-tolerant tracking consensus protocol is designed to make the tracking error converge asymptotically.Reference [11] studied the consensus tracking problem of the multi-agent system with the sliding mode control to reject the nonlinear disturbances and improve control precision.Reference [12]studied UDE-based control for multi-agent system trajectory tracking to improve robust performance.
However,the methods in the above works need accurate system models.To relieve the effect on a system with unknown dynamic parts by back compensation,one effective tool is neural network (NN)estimation.NN was used to estimate the unknown dynamic parts of the agent to realize the distributed tracking control in [13].Reference [14] extended the method to the trajectory tracking control of a fractionalorder agent.Reference [15] displayed a control strategy that uses back-stepping and surface control techniques for the high-order stochastic multi-agent system to reach consensus.Reference [16] proposed a serial-parallel estimation model with the radial basis function NN.Reference [17] utilized the radial basis function NN to estimate the uncertain interaction and the unknown non-linear dynamics.All the methods above do not directly apply to a second-order agent system with an adaptive controller,which brings extra order states to the dynamics.
To effectively solve the robust consensus tracking control problems of the system with nonlinear disturbances and uncertain model parameters,this paper presents another NN based cooperative control method with an adaptive controller that helps smooth the agent’s trajectory and facilitate the consensus process.The NN is constructed to estimate unknown system components.
The main contributions of this work are as follows:
1) An adaptive control algorithm for the consensus tracking of a leader with unknown dynamics is applied on second-order follower agents,and robustness is guaranteed via NN based estimation of the leader’s parameters.In contrast,the existing works[13]-[15]adopt control laws with direct state feedback.Moreover,compared with [13],the proposed adaptive controller delivers less oscillation and obtains a better convergence rate.
2) To cope with the model uncertainties,NN estimators and their update laws are well designed,and great efforts are made to fit them into the adaptive control law,since an extra order in the differential equation is introduced by the adaptive controller.
3) The proposed adaptive robust control for the multi-agent system can be extended to similar work that addresses cooperative control stability problems when disturbances or uncertainties are imposed on the system.
The rest of this paper is arranged as follows:Section 2 gives some basic knowledge of the graph theory and artificial NN used in this article.In Section 3,the problem of consensus tracking is formulated.In Section 4,we present the main result of the consensus tracking adaptive algorithm with the nonlinear disturbance and unknown leader agent’s information.A numerical example is given in Section 5 to verify the effectiveness of the control laws which we proposed in the main result.Section 6 concludes this paper.
2.Preliminaries
This Section introduces the mathematical preliminaries that will be used later in preparation for the problem statements in Section 3.
2.1.Graph Theories[18]
A graph G(V,E,A) is the communications topology of the multi-agent system withnvertices,V={1,2,…,n} is the set of nodes,and E ⊆V×V is the set of edges.An edge (si,sj)∈E is the connection betweensiandsjfori,j∈V,wheresiandsjare both the nodes of the graph,respectively.The weighted adjacent matrix A can be defined asai,j>0,if (si,sj)∈E,otherwiseai,j=0.The Laplacian matrix of the weighted undirected graph G is defined as L=[li,j]∈Rn×n,and L=D −A,where D=diag{d1,d2,…,dn} with

Assumption 1.Assume that the topology graph G is undirected.
In this paper,we investigate the leader-following tracking problems.The weighted adjacent matrix A and the Laplacian matrix L are both symmetric.B=diag{b1,b2,…,bn} is a diagonal matrix,and it has at least one nonzero entry.Theith node of G is informed in respect of the leader’s statebi>0,otherwisebi=0.
Lemma 1.Under Assumption 1,(L+B) is a positive matrix.
2.2.NN Theories
The radial basis function (RBF) is used as the “basis” of the hidden unit to form the hidden layer space,so the input vector is mapped directly to the hidden space without any weight connection.For a smooth functionf(x)∶Rn→Rm,there are ideal weight coefficientsθf,such that

whereϵf∈Rmis the approximation error to satisfy that ∥ϵf∥≤δ,δis a positive constant;ψf=[ψf,1,ψf,2,…,ψf,i,…,ψf,q]Tis the basis function vector,and

where x ∈Ωx⊂Rn,Ωxis a compact set,cirepresents the center of the receptive field,andηiis the width of the Gaussian function.
Every unknown smooth functionf(x)∶Rn→Rmcan be approximated by RBF in the following equation:
wheredenotes the adjustable weight coefficient.
3.Problem Statements
Consider an uncertain second-order multi-agent system,whose model dynamics can be described as

where I={1,2,…,n}.
For agenti,ri∈Ris the position andvi∈Ris the velocity,ui∈Ris the control input,andfi(ri,vi) is an uncertain smooth function in respect ofriandvi.We assumed that the multi-agent system has an informed agent,called the leader agent.The informed agent’s model dynamics can be described as

wherea0is a constant andβ(t) is a piecewise-continuous bounded function of time.There area0andβ(t) two unknown parameters in the informed agent’s dynamics which are completely unknown to other agents,while some agent can get the information ofr0(t) due to the communications in the agent group.
For the multi-agent system,we define the consensus tracking error as following:

whereai,jandbiare all defined in sub-section 2.1.
Definition 1.Consensus tracking control[19]
After designing the control inputui(t),if the system states variables of all the followers eventually converge to the same value,then the system is consensus tracking control:

For this multi-agent system,the main challenge of designing the consensus control law from two parts.Firstly,the dynamics of model (3) have an unknown nonlinear functionf(ri,vi) and the method of feedback linearization cannot be used to linear the model dynamics.Secondly,the leader agent’s dynamics are unknown because of the existence of parametera0and nonlinear functionβ(t).
NN is designed to estimate the value of unknown smooth functionsf(ri,vi) andβ(t):

4.Main Results
The following coordinate transformation is adopted to simplify the problem:

The adaptive controller which is designed to smooth the trajectory is:

whereξi∈Rnis the extra state which helps smooth the agent’s trajectory and facilitate the consensus process,m1,m2,m3,andm4are all positive constants.
Fig.1shows the structure of the consensus tracking control scheme,and the control input does not contain the velocity information.
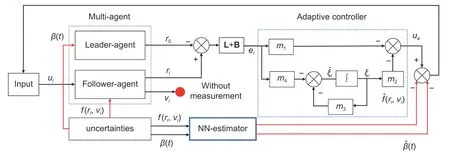
Fig.1.Structure of the consensus tracking control scheme.
To combine the approximate of NN and controller in (11),the control input is designed as

Moreover,sgn(x) is a sign function,it means

Substituting (12) into (10),it yields

Also,define

Therefore

where


Then the adaptive control laws which were adopted to adjustment the parameters are

Theorem 1.Consider the control input (12) for the multi-agent system (3),under Assumption 1,the adaptive consensus tracking control scheme in (12) and the update laws which are given by (16) to (18)guarantee the boundedness of all the signals in the closed-loop system and the achievement of asymptotical tracking in the sense of (6),when

hold.
Proof.
The following Lyapunov function is used to prove the stability of multi-agent system:

which is definitely positive under Theorem 1.Thus,the first-order partial derivative ofVwith respect to time (t) is

Using the facts that


5.Simulation Results
5.1.Numerical Simulation Case
In this part,numerical simulation cases are conducted to verify the theorems,respectively.Consider a group of three agents with the following dynamics:

Fig.2shows the communications topology of this multi-agent system,and we assume the leader agent’s dynamic is

Fig.2.Weighted connection among the agents.
The Laplacian matrix and weight matrix are defined as

The following Gaussian functions are used

whereη∗;kandμ∗;kare the width and center of their receptive fields,respectively.
The NN estimation range is chosen as

The selection of control parameters should satisfy (19).Then,the initial parameters are

Figs.3to8show the simulation results for the multi-agent system which has the disturbancef(r,v).According toFig.3,all three agents follow the leader agent’s trajectoryr0.Fig.4shows the NN estimation off(r,v),and the estimation error signal finally converges to a bounded set.Also inFig.5,the NN estimation error ofβ(t) finally converges to a bounded set.Fig.6illustrates that the tracking error finally approaches zero,which validates Assumption 3,and indicates that the multi-agent system can finally achieve consensus.The virtual variableξialso converges to zero inFig.7,which means the adaptive controller achieves a good control effect.Also,inFig.8we can get the control input is valid,which satisfies the input condition.

Fig.3.Trajectory of each agent.

Fig.4.NN estimation error of f (r,v).
5.2.Comparison Results
As mentioned in the part of the introduction,[13] focused on the second-order multi-agent system with model uncertainties and presents a distributed control approach to track a first-order leader,where NN is adopted to estimate the agents’ unknown dynamic parts.Inspired by it,we adopt the same NN estimation method and improve the consensus tracking performance.In this part,comparisons are made with the control algorithm proposed in [13],where the same set of parameters is used in this experiment.The simulation results are displayed inFig.9(the tracking trajectories) andFig.10(the tracking errors).Comparing with those in [13] (seeFig.11),the trajectories generated by our method show less oscillation and a better convergence rate.This is attributed to the adaptive controllerξithat plays a major role in making the difference,and is thus proved to be helpful for smoothing the agent’s trajectory and facilitating the consensus process.

Fig.5.NN estimation error of β(t).

Fig.6.Trajectory of tracking error.

Fig.7.Trajectory of virtual variable ξi.

Fig.8.Trajectory of control input.

Fig.9.Trajectory of each agent (comparison).

Fig.10.Trajectory of tracking error (comparison).

Fig.11.Trajectory of each agent and tracking error[13]:(a) state and (b) tracking error.
6.Conclusion
In this paper,we propose a consensus adaptive tracking control law for the multi-agent system with the nonlinear disturbance and model parameters uncertainty under the condition of unknown leader agent’s information.The consensus stability is proven by the Lyapunov method.According to the simulation result,the NN based adaptive control addresses the consensus of the nonlinear multi-agent system effectively.
In future work,we will use the NN estimation based adaptive method to solve the communications topology conversion problems of the multi-agent system.
Disclosures
The authors declare no conflicts of interest.
杂志排行

Journal of Electronic Science and Technology的其它文章
- Comparison of Khasi Speech Representations with Different Spectral Features and Hidden Markov States
- Big Data-Based Transformer Substation Fault Prediction Method
- Improved Active Islanding Detection Technique for Multi-Inverter Power System
- Progress and Prospects of Hydrogen Production:Opportunities and Challenges
- Perovskite Single Crystals:Synthesis,Properties,and Applications