AGVS在医药行业的应用
2021-08-16李建旭
文/ 李建旭
北方工业大学
一、引言
1. AGVS概述
自动导引车(AGV)作为物料搬运输送的主要设备,是一种将环境感知、动态决策和运动控制等技术融于一体的综合控制系统,是整个工业自动化和物流自动化的最重要组成部分之一。实现的主要功能是在计算机、传感器和无线局域网络的控制下,经电磁、激光等导向装置引导并沿程序设定路径运行,能够自主导航,自动路径规划和完成作业任务的无人驾驶自动车,它通过电池驱动,并且可以根据实际需要配备不同的举升机构或移载机构,以完成相应的移交载荷的操作任务,具有自动化程度高,调度管理简单便捷,性能安全可靠等优点,本质上它为现代制造业物流提供了一种高度柔性化和自动化的运输方式,并被广泛应用于烟草、医药和港口等各个行业领域。
2. AGV系统的总体结构
如图1所示,AGV系统由地面控制系统和车载控制系统两部分组成。
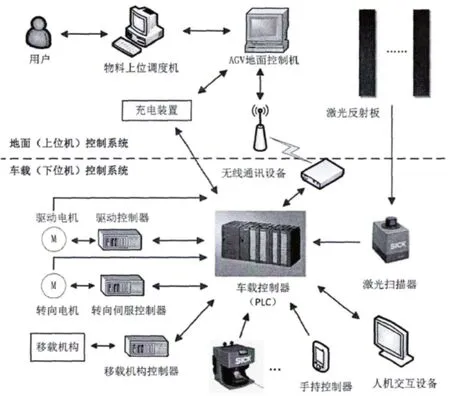
图1 AGV系统结构图
地面控制部分主要由物流系统管理机、AGV系统管理监控主机组成,其中AGV管理和监控计算机是AGV系统运行的核心,主要功能有:执行任务命令;为不同的运输任务分配最优的AGV小车;为每个运输任务安排运输路线;控制AGV系统中的多台AGV小车的交通;处理现场的一些输入、输出信号。
车载控制系统主要包括主控制系统、激光导引定位系统、后叉移载控制系统、自动充电系统、人机交互系统、安全保护系统、运动伺服控制系统等组成,负责对上位机控制系统的指令做出响应,控制车体的定位、行驶、货物装卸和故障诊断等操作,由以下系统组成。
二、 医药行业的AGVS具体实现
AGV是一种主要用于货物搬运的机器人,具有灵活高效的特点。在自动化物流系统中,AGV能够减少工人的劳动强度,缩减人员配备,大大改善工作条件和环境,并且不受场地、道路和空间的限制等优势,充分体现出自动性和柔性,实现高效、经济、灵活的无人化生产。
在医药行业,物料搬运是一项比较日常的工作,可以发生在制药车间、仓储环节、医药运输环节甚至是实验室内。利用AGV机器人可以将物料高效、精准地完成点对点的搬运作业,实现精细化、柔性化、信息化、缩短物流时间、降低成本等。
在制药车间,由于药品属于特殊商品,各个环节包括无菌、洁净度、人员、设备等方面都需要进行严格把关,因此车间级的生产过程很难进行实时的调度和安排。而专门的AGV机器人可以满足医药行业对特定生产环境的特殊要求,保证其在车间内实现对药物、疫苗、诊断设备、医疗设备等安全可靠的运输,减少运输过程中受微粒和微生物带来的影响,大大消除污染的风险。
在药品仓储环节,药品仓库需满足GMP等认证要求,因此医药行业仓库对于药品的存储要求非常高,而满足条件的机器人可以分担这方面的工作。
在医药运输环节,随着制药行业GMP要求越趋严格,无菌制剂的生产将从硬件和生产过程控制上升级,因此也面临厂房及生产设备重新进行技术改造的需求。在此过程中,AGV可以大量应用于成品、半成品输送,在完全自动无菌工艺系统中得到大量应用。代替传统的人工搬运托盘作业,可大大提高生产运输效率,减少人工投入。
三、系统设计的重点问题和软件系统界面的创新
1.充电模式优化
(1)硬件选择
硬件选用锂电池,主要是锂电池以下优点:
①灵活性
在体积和重量上,锂电池比一般动力电池都要小和轻,作为搬运工具,锂电池的清小能够减少它的负担和更加的灵活。
②免维护
锂电池具有免维护的特点,只须定期检查保养即可,减少了人工成本的投入,提高了自动化程度。
③可靠性
锂电池通过CAN总线与AGV车载控制系统进行通讯,并且可以详细的读取锂电池各个参数,以获取锂电池的实时状态,当电量消耗到设定值后,配合车载控制系统,实现AGV的自动充电控制,保证系统安全、可靠的运行。
(2)软件设计
在一般情况下,AGV小车的容量在低于一定的值才去充电站充电,但是在一段时间内AGV需要频繁运行,所以拟设定两个充电档值,当小车处于空闲状态时,虽然AGV小车电池容量没有达到必须充电的档值,AGV管理系统也可以调度AGV小车进行充电,当充电完毕或有任务时小车就可以投入运行,在最大程度上提高运输效率。AGV充电完全由AGV管理监控主机和地面智能充电站监控。
BMS(电池管理系统)与AGV控制系统的信息交互流程:
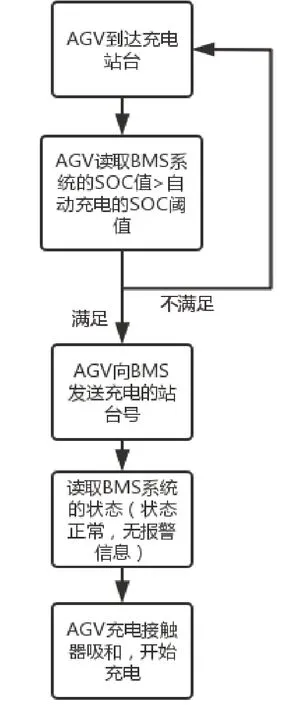
图2 BMS与AGV控制系统信息交互流程图
2.人车混行交通管理
基于医药工厂的实际情况看,大多数现场无法实现完全无人化,因此不可避免的会出现人车混行的现象。人车混行不仅对于AGV的运行效率造成影响,而且对于安全也提出了很大的挑战,因此建立一套合理的交通管理规则至关重要。目前,国内大部分使用AGV的药业公司工厂通过增加红绿灯等外接设备,并制定一定的规则,来解决人车混行带来的问题。下面以某药业公司工厂的实际交通管理应用为例进行说明。
图3为某药业公司工厂的布局简图,AGV主要是从图中的Packing Line区域搬运物料至Packing station区域,中间涉及到工厂工人与AGV交叉混行的路线,因此在1#、2#、3#、4#设计4条人行横道,以此减小交叉运行带来的安全风险、并且提高AGV的运行效率。
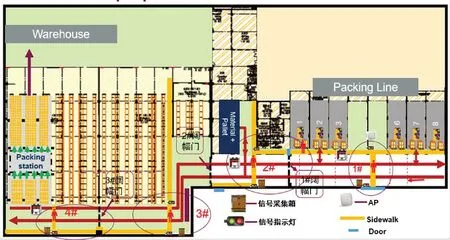
图3 现场布局图
(1)为提高AGV运行效率及流畅性,总体按照人避让车的原则进行设计
现场人行横道的长度是4米,人正常行走速度在4~5km/h,因此通过人行横道的时间在2.88s~3.6s,从安全及保证AGV运行效率的角度考虑,当AGV出现在距离人行横道小于3.6秒时,信号灯显示红灯,工作人员禁止行走人行横道,当AGV出现在距离人行横道大于3.6秒时,信号灯变为绿灯,工作人员可以通过人行横道。
(2)现场使用情况
当距离人行横道较远时,通过吸顶式灯,在人行横道地面上显示“Go通行”,如图4所示 ;人员可以正常通过,当AGV距离人行横道较近时,通过吸顶式灯,在人行横道地面上显示“Stop 禁止通行”,如图5所示。

图4 AGV距离人行横道较远时

图5 AGV距离人行横道较近时
3.自动门的设计
考虑到医药行业的区域恒温恒湿的要求,一般都设计自动门。当AGV小车到达门口时,会通过MOXA向自动门发出开门申请信号,此时自动门上升,待自动门上升到达上到位时,给AGV小车通过信号,AGV小车通过自动门,待AGV小车完全通过自动门后,自动门下降。自动门的设计充分满足了恒温恒湿的要求。
4.操作终端的设计
AGV在医药工厂的应用,由于涉及到现场空间及生产流程的限制,不能实现所有的工作流程自动化,因此在一些工作环节涉及到人机交互,因此针对现场的实际生产情况,加入了研华的工业级操作终端,此操作终端通过无线网络与上位机进行通讯,根据现场情况配备10个操作终端分配给原材料区、包装区和成品区进行使用。通过操作终端一方面可以实时获取AGV系统的运行情况,另一方面现场的需求可以通过操作终端传达给AGV系统。
接下来对操作终端的设计进行介绍:
(1)成品区界面
货位颜色如图6所示。AGV系统在某货位卸货完成后,该货位将变为红色(冻结货位除外),且AGV系统不会向该货位继续卸货(同产线的多条任务卸货方式为:从左到右。从上到下)。AGV系统将该列全部卸货完成后,该货位颜色为红色。点击文本“未绑定”(如果某列绑定产线后,会文本“未绑定”会变为所绑定产线号,如:Line1,Line2...)后,会有弹窗确认该列已经空。确认后,该列所有货位(冻结货位除外)变为绿色,AGV将继续向该列依次卸货;

图6 成品区界面
(2)原材料区界面
操作方式与成品区域一样,具体见图7。非JIT区域,员工按照包装线要料明细所指定位置放料,放料完成后,点击相应货位即可触发该任务,任务触发方式为:相同货位多条任务,AGV系统按照任务创建时间依次执行。

图7 原材料区界面
(3)包装线界面
系统会根据配置文件所确定该PDA所属产线,生产产品清单(见图8)也是该产线所成产产品名称。下方5个按钮,其中“外纸箱”、“说明书”、“小纸盒”、“防揭换封口签”为要料按钮,点击后系统根据当前产线,当前产线所生产产品种类相应的任务。“成品入库”为5线临时入成品库货位;点击后,即可生成任务。
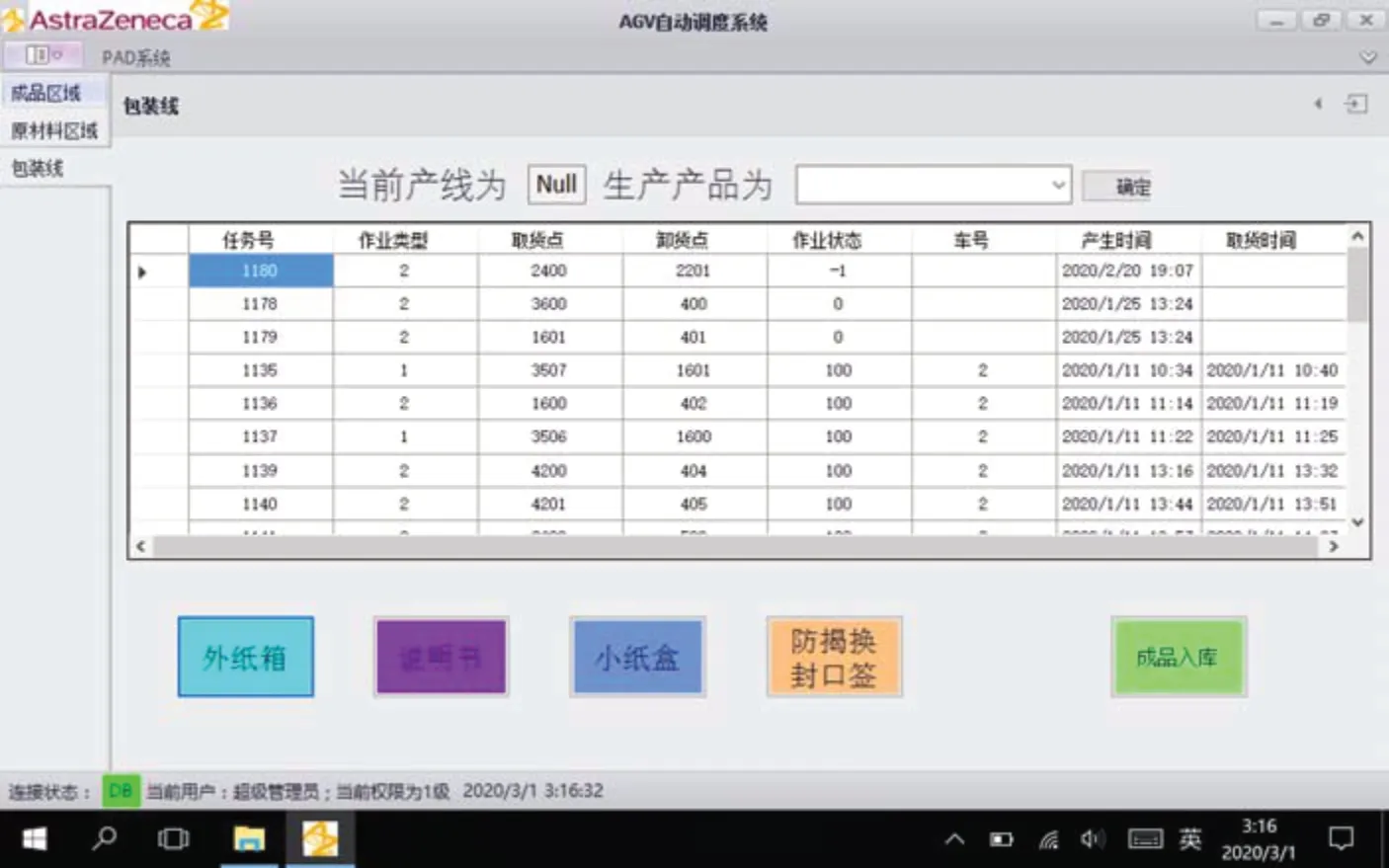
图8 包装线界面
5.安全防护系统设计
为了提高系统的安全等级,该AGV安全防护系统的设计按照CE的标准进行设计,在元器件的使用中加入了安全PLC,其接收信息并进行逻辑控制,作用于车体的安全开关,最大限度保证AGV运行的安全稳定。
(1)安全控制器的设计
安全PLC的设备器件如图9所示,安全设备部件主要包括CPU、GCAN、XTIO、MOC、安全编码器、安全激光传感器、急停按钮、接触器和货叉尖触须急停开关等。

图9 SICK安全控制器件
对于整个安全控制系统的调试,可以采用SICK的专用软件进行编辑调试。如图10所示是安全控制器的控制流程,通过安全驱动编码器获得舵轮的速度,通过CAN通讯模块从车载控制器获得转向的角度信息,通过速度和角度信息,激光安全传感器进行区域切换,结合激光安全传感器在当前区域是否有障碍物进入停止区、AGV手自动操作模式和AGV当前的舵轮速度,确定激光安全传感器是否有急停报警。当复位按钮、急停按钮、激光安全传感器和货叉急停开关都处于正常状态时,动力回路接触器闭合,急停继电器断电,AGV处于正常供电状态,反之动力回路接触器断开,急停继电器上电,AGV处于正常断电状态。
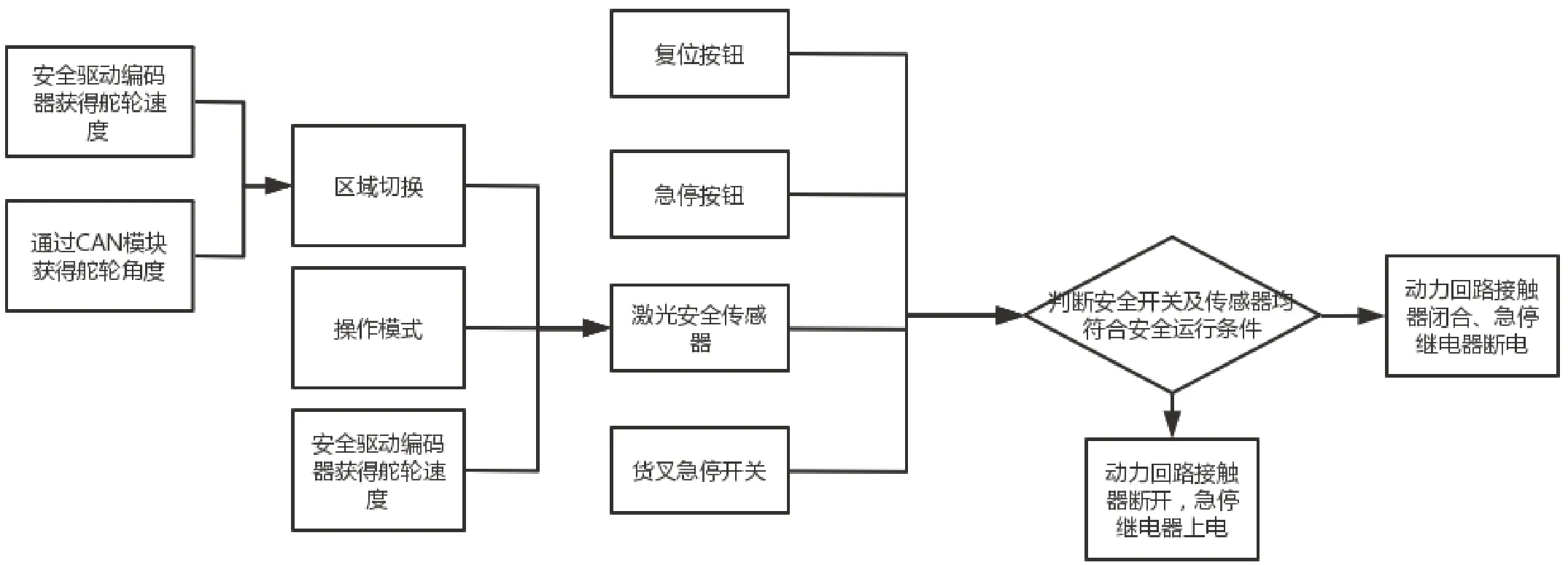
图10 安全控制系统的控制流程图
(2)激光安全传感器的使用
从安全的角度出发,此AGV在车体右上角和左下角分别安装S300传感器,安装方式为倒置斜装,可以实现车体周围360度覆盖,调试安全激光传感器就是对传感器的各个区域进行规划,并对I/O口进行配置使用,以此达到在不同情境下,通过安全PLC发送指令控制S300传感器进行区域的切换。
①如图11所示,S300传感器最多支持5个I/O口进行分配,具体为3个输出口、2个输入口,输出部分主要包括S300表面污染警告、S300表面污染错误、复位需求、危险区域警告、区域1警告和区域2警告,输入主要包括外部设备进入相应区域和S300自复位功能。
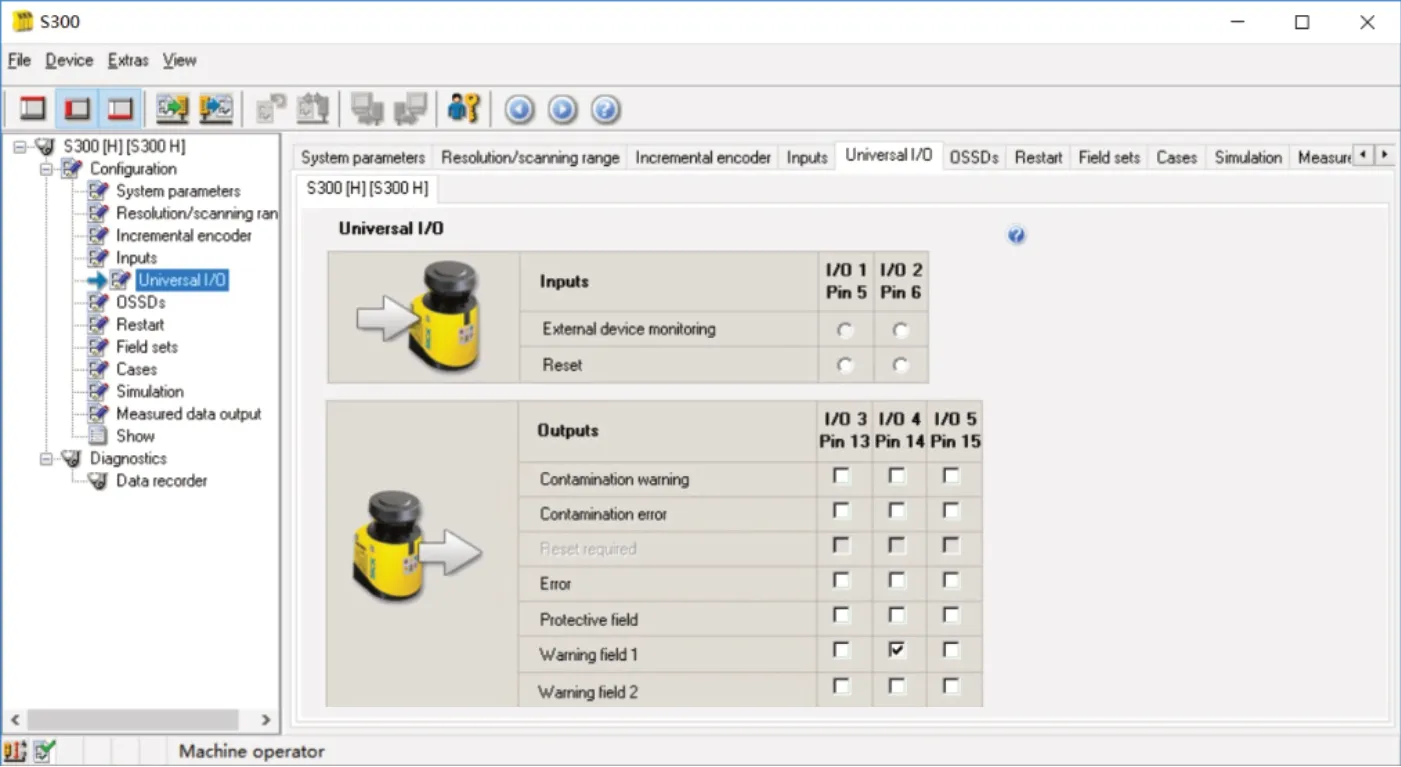
图11 安全传感器S300的I/O口配置图
②对预警区域和危险区域进行划分,其中灰色区域为预警区,障碍物进入此范围AGV开始进行减速,红色区域为警告区,障碍物进入此区域,AGV开始进行紧急停车。因此对此区域进行设计时,既要保证AGV能够及时停车,同时AGV的预警区和警告区又不能过大,避免无谓的停车,造成AGV的效率降低。
因此,以AGV在直行高速运行时的场景为例,需要结合两种情况进行讨论:
AGV前方有固定障碍物,该障碍物逐步进入减速区、停止区
AGV正常运行,前方突然进入障碍物
测试AGV在直行高速运行情景下,制动距离为L_1,则警告区从传感器位置开始,正前方距离L_警告区>L_1,同时假设AGV高速运行情景下的速度为v_h,在进入警告区时,希望AGV的速度达到v_2,AGV在预警区的减速度为a_2,且AGV的减速度恒定,根据牛顿运动定律,可以得出从速度v_h降到v_2,经过的位移为:

因此警告区外沿至停止区的外沿距离L_预警区≥L_2,因此在进行区域范围设计时,应满足以下条件:

根据上面的分析,并结合AGV的使用场景对S300传感器进行扫描区域的划分和分配,如图12所示。
图12 安全传感器S300的区域设计图
四、总结
根据项目现场的实际工作情况,对充电系统进行了合理的设计,既保证了充电的及时性,又有效地利用了车辆空闲的时间,提高了系统工作效率;采用红绿灯交通管理系统,既避免了人车混行带来的安全风险,又保证了AGV的正常运行;自动门的设计,很好的保证了现场部分区域恒温恒湿的需求;操作终端的加入能够更加便利的获取AGV系统的运行状态,并且方便呼叫AGV执行任务;安全系统采用CE的标准进行设计,加入了安全PLC,控制车体的安全开关和安全传感器等,在对安全PLC进行逻辑控制设计的基础上,对S300安全扫描区域进行设计,使AGV在任意位置实现360度安全防护,在保证安全的同时又加入尽可能的保证运行效率。医药行业AGV项目通过对AGVS的研究和技术创新,设计了一套符合现场实际情况的AGV系统,既满足了现场的实际需要,又提高了系统的工作效率。
