斜拉索表观检测机器人的开发
2021-08-15季云峰王晓菲
季云峰,王晓菲
(1.同济大学桥梁工程系,上海市 200092;2.宁波交投公路营运管理有限公司,浙江 宁波 315000)
0 引言
近三十年来,斜拉桥因其优美的外形、强大的跨越能力,逐步成为大跨径桥梁中的最重要形式之一。斜拉索作为斜拉桥结构的关键部件,其在运营状态下的可靠性是至关重要的。在长期环境因素下,斜拉索护套会出现不同程度的缺陷,比如老化、开裂、坑洞等,从而影响内部斜拉索钢丝的耐久性甚至力学性能,给斜拉桥的安全运营带来不利。因此,有必要对斜拉索进行定期的检测,以确保桥梁的结构安全。
目前,斜拉索检测技术主要分为表观缺陷检测与内部状况检测。表观缺陷检测主要通过检测拉索护套表面的缺陷情况来推测拉索的受力性能。内部状况检测通常使用无损检测技术,例如:射线法、磁通量法等。传统拉索检测包括:人工目测法、搭设支架法、卷扬机探伤法,以及吊篮检测维护四类。这四种方法效率低,成本高,存在安全隐患,其结果也具有较大的主观性,只能作为辅助检测手段。现开发了能够自动沿拉索爬升并完成斜拉索表观检测任务的智能检测机器人。该机器人能够很好地解决斜拉索表观检测中存在的主观、效率、安全等局限性,促进了桥梁智能化检测技术的发展。
1 研究现状与发展趋势
近年来,国内外在斜拉索表观检测机器人技术的开发上已经做了一定的探索,并累积了不少经验,其中部分也已经应用到工程实例中,取得了一定的效果。
上海交通大学的Jun Luo 等[1]研发了可进行表观检测的爬索机器人,但该装置自重较大,安装繁琐,速度较慢,效率较低。袁建明等[2]基于漏磁法开发了斜拉索检测机器人,可对拉索的内部锈蚀、断丝病害进行检测,但其仍存在自重大,速度慢的问题。江苏法尔胜公司[3]开发的爬索机器人,可在复杂的拉索表面运行,其结构简单,运行稳定,已应用于实际工程。Xinke Li 等[4]开发了一种基于视觉检测技术的拉索机器人,实现拉索表观缺陷图像的识别,但其构造较为复杂。
总的来说,斜拉索表观检测机器人的研究已经取得了一定的进展,其特征趋势也向着轻型化、便捷安装、行进快速、缺陷自动识别的方向发展。
2 斜拉索表观检测机器人的研究与开发
现以斜拉索表观缺陷检测为研究对象,开发了能够自动沿拉索爬升并高质量完成斜拉索表观检测任务的智能检测机器人,具备了自重轻、速度快、续航长、效率高、安全度高等主要优点,具有较大的工程实用价值。
2.1 总体设计
斜拉索表观检测机器人主要可分为驱动系统与图像系统,同时包含了障碍检测模块,无线传输通信模块等,如图1 所示。
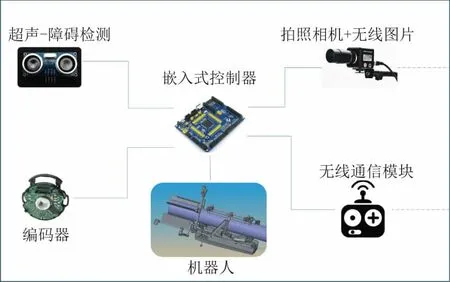
图1 斜拉索表观检测机器人系统架构图示
驱动系统具有较强的驱动能力,使机器人能克服自重在不同倾斜角度的斜拉索上自主爬升。同时,驱动系统能够克服一定程度的拉索振动和表面雨水的影响。图像系统的功能是稳定地采集斜拉索的表观状况,并对斜拉索表观典型缺陷进行自动化识别。此外,为保证检测机器人在实际运用中的正常运行,配备了障碍检测系统、回收系统、里程定位系统、无线传输系统等,以提高装置的实用性。
2.2 主要技术参数
该项目开发的斜拉索表观检测机器人具备了轻型化、便捷安装和拆卸、行进速度快等特点。主要技术参数如下:(1)平台尺寸:800 mm×260 mm×420 mm;(2)本体重量:12 kg;(3)负载能力:10 kg;(4)适用缆索斜度:0°~90°;(5)适用缆索直径范围:90~160 mm;(6)驱动方式:电机驱动;(7)最大爬升速度:18 m/min;(8)满电量有效运行距离:≥1 000 m;(9)遥控器可控距离:≥1 000 m;(10)最大跨越障碍能力10 mm;(11)图像最高分辨能力0.2 mm。
2.3 驱动系统
该装置驱动系统采用前后双轮驱动方式,2 个驱动轮和2 个辅助轮的设计可适应不同直径和不同螺旋线分布的拉索检测场景。相机支架采用碳纤维杆结构,重量轻、强度高。大面积可调遮光板能遮挡直射相机的光线,使相机成像较为清淅。机器人侧面支架上增加导向轮,使机器人在斜拉索上运行时更不易跑偏,跑偏时也能保证正常爬行。同时,该系统将机器人平台的重心放在索体下方,确保机器人运行的姿态稳定性。驱动系统的基本构造见图2 所示。
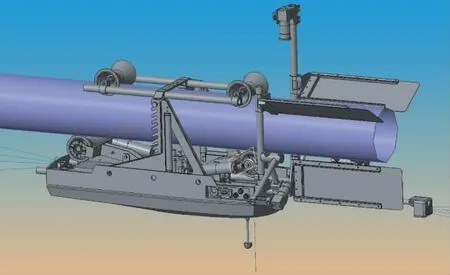
图2 驱动系统基本构造图
2.4 图像系统
图像系统包括图像采集系统和图像处理系统。图像采集系统由直流电源、数据处理单元、数据存储单元、工业相机、遮光组件、辅助支架构成。整个图像采集系统均布在拉索径向表面,并且可根据拉索的直径大小调整相机位置。图像处理系统能够自动存储采集系统的照片,并对图像进行缺陷的自动化识别。图3 为图像采集系统架构与图像处理系统的软件界面。
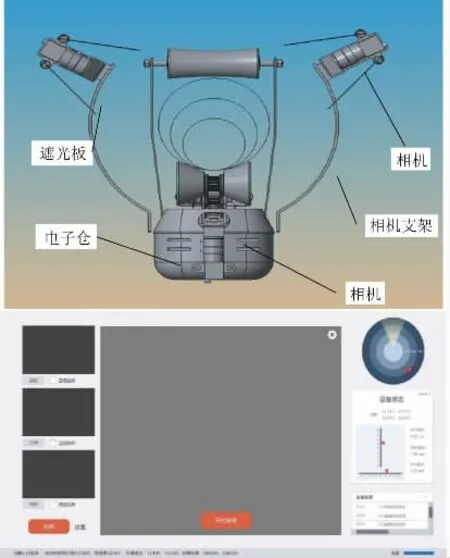
图3 图像采集与分析系统图示
图像处理系统中对于斜拉索表观缺陷的识别包括以下几个步骤:光照补偿、异常提取、剔除护套边缘、剔除护套螺旋线和缺陷提取。现分别对其介绍如下。
2.4.1 光照补偿
图像处理中的光照补偿方式是直方图均衡法。通过改变所采集图像的直方图来改变图像中各像素的灰度,增强动态范围偏小的图像的对比度,便于后续的处理。
2.4.2 异常提取
将光照补偿后的图像,通过高斯滤波、边缘检测,再进行图像二值化处理得到异常区域。
首先,斜拉索表观病害信息一般在图像里都是高频信息,采集到的图像经过光照补偿处理后仍存在一定的噪声。这里采用高斯滤波器对于图像先进行平滑处理。处理后的图像就会过滤掉因采集原因带来的高频毛刺等干扰信息,并且保留因下拉索而缺陷的信息。
其次,用Sobel 算子对图像进行边缘检测,提取斜拉索图像特征区域。
最后,对边缘检测后图像进行二值化处理。边缘检测结果表示灰度值低的边缘信息弱、灰度值高的地方边缘信息强。故需滤掉边缘检测出较弱的响应,从而提取出图像的异常区域。
2.4.3 剔除护套边缘
图像处理系统在识别出异常区域后,采用Hough直线检测算法来一步剔除护套两侧的边缘线。
2.4.4 剔除护套螺旋线
斜拉索表观异常区域中包含了表面正常的、防风雨振的螺旋线信息,处理系统采用模板匹配算法来剔除上述信息。将典型螺旋线的目标图片作为模板,在采集到的斜拉索图片中进行遍历匹配,提取匹配响应较强区域,作为螺旋线区域,即可将其在图像中剔除。
2.4.5 缺陷提取
采集的图像经过以上步骤的处理后,计算保留下来的像素区域大小,若大于一定阈值,则认为原始图像中存在缺陷区域,作出提示并保留最终的缺陷识别后图像结果。
图像处理系统对于识别出的表观缺陷,可以计算出其病害数量、病害长度及病害面积,最终生成一个病害统计表。具体计算流程如下:(1)进行图像膨胀处理;(2)计算连通域,根据阈值过滤掉面积较小的连通域,并统计病害实例个数;(3)进行轮廓提取,用有序的轮廓点来表示病害形状;(4)根据轮廓点信息进行长度面积计算;(5)生成检测任务的病害统计表。
2.5 实桥测试
为了测试斜拉索表观检测机器人的现场作业性能,在宁波象山港大桥和清水浦大桥共选取了3 根代表性的斜拉索进行了实桥测试。3 根斜拉索基本情况分别为:1# 斜拉索——象山港大桥A21 斜拉索,长度345 m 倾斜角26.7°;2#斜拉索——象山港大桥A1 斜拉索,长度101 m,倾斜角78.8°;3# 斜拉索——清水浦大桥MCW17 斜拉索,长度223 m,倾斜角23.8°。
在3 根斜拉索现场测试过程中,智能检测机器人工作状态稳定,能够自动爬升和下降,爬升和下降过程中无较大幅度的晃动和打滑现象(甚至在小雨环境下),行走速度15~18 m/min,下降速度较爬升速度略快,机器人行走速度随着斜拉索角度的增大略有降低,且整个测试过程图像采集平稳。缺陷识别结果如下所列。
(1)对于1#斜拉索,1#相机在141.06 m 处,识别出凹槽形态病害;在243.56 m 处,识别出起皮形态病害,形态范围都较准确。3#相机在3.44 m 处,识别出深度划痕形态病害。
(2)对于2# 斜拉索,3# 相机在14.25 m 处,识别出坑洞形态病害;在2.14 m 处,识别出凹槽形态病害。1#相机在2.29 m 处,识别出腐蚀形态病害。
(3)对于3# 斜拉索,1# 相机在3.34 m 处,识别出凹槽形态病害。3# 相机在6.71 m 处,识别出深划痕形态病害。2#相机在30.66 m 处,识别出坑洞形态病害。
以3# 斜拉索缺陷识别结果为例,表1 列出了斜拉索检测机器人检测出的凹槽、划痕、坑洞缺陷识别过程与结果。
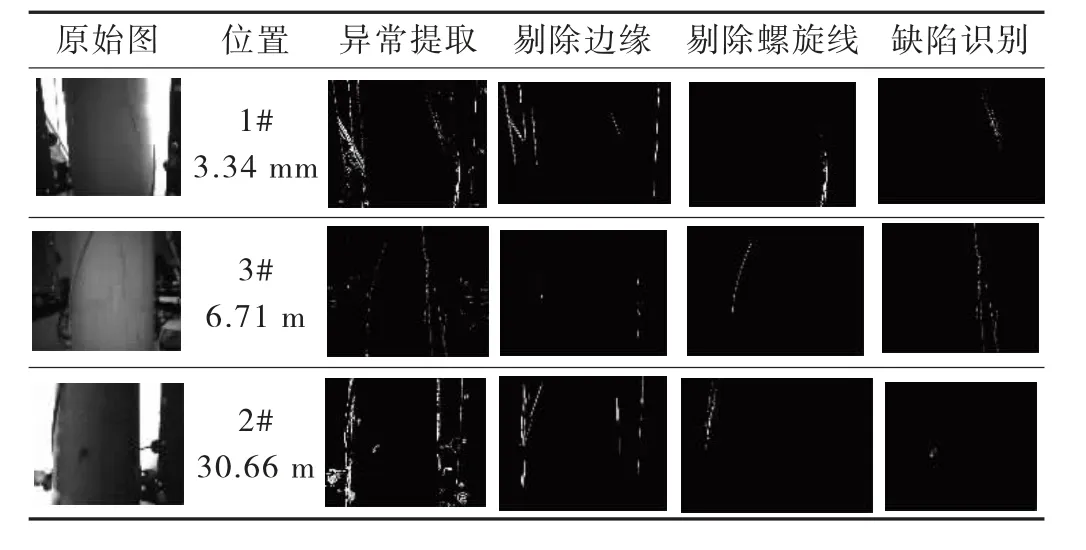
表1 3# 斜拉索典型表观缺陷识别结果表
实桥测试的结果表明:检测机器人沿着在不同倾角和不同表面干湿状态的斜拉索快速而平稳地爬升和下降,在接近桥塔表面后自动返回,在接近桥面时自动停止;机器人的图像系统能够稳定地、完整地采集斜拉索表面的典型缺陷,并能够自动识别缺陷和其几何特性。
3 结语
本文以斜拉索表观检测为研究对象,开发了能够自动沿拉索爬升并完成斜拉索表观检测任务的智能检测机器人,具备了小型化、快速自爬行、高质量图像采集、缺陷自动化识别等优点,具有较大的工程应用价值。
