一种变尺度S型核分式低次幂自适应滤波算法*
2021-08-14火元莲王丹凤龙小强连培君齐永锋
火元莲 王丹凤 龙小强 连培君 齐永锋
1) (西北师范大学物理与电子工程学院, 兰州 730000)
2) (西北师范大学计算机科学与工程学院, 兰州 730000)
为了进一步提高非线性自适应滤波算法在非高斯冲激噪声以及有色噪声环境下的鲁棒性, 提出了一种基于S型函数的变尺度核分式低次幂自适应滤波算法, 该算法利用S型函数的非线性饱和特性和低阶范数准则来克服训练数据被非高斯冲激噪声破坏时性能下降的问题, 并将S型函数与核分式低次幂算法的代价函数相结合后, 通过引入的变尺度因子来平衡和进一步提高算法的收敛速度与稳态误差性能.仿真结果表明在不同噪声环境的系统识别中, 所提算法相比其他核自适应滤波算法的性能更优.
1 引 言
自适应滤波[1]在自适应控制、回声消除、系统识别、信道均衡等领域有着重要作用, 也是近几十年大量研究的热点.科学研究是为了更好地认识客观世界, 而客观世界中各种物理量变化的表达概念就是波、信号等, 例如: 混沌是在相对论和量子力学之后的第三次关于物理基础科学的革命, 其代表非线性动力学研究, 自适应滤波技术在混沌系统识别[2]中应用而生.柴金华和陈飞[3]研究了一种准平行光干涉滤波型相控技术, 利用滤波相关知识来解决相位差矫正问题.机器学习的发展也进一步推进了自适应滤波算法的研究, 其利用参数的自适应调整使得学习过程更加精确以及灵活.事实上, 传统的自适应滤波算法通常被理解为一个线性结构,例如广受欢迎的最小化均方误差[4]算法和归一化最小均方误差[5]算法.然而实际应用中空间环境是不确定的, 这一定程度上限制了传统滤波算法的性能.为了有效解决算法的适用性问题, 选择合适的代价函数也就成为自适应滤波算法设计的关键.它可以发现受非高斯噪声以及有色噪声污染的数据系统的期望结构.基于二阶统计量的均方误差(mean squared error, MSE)准则因其低计算复杂度和凸性被广泛用作代价函数, 然而这种准则下的自适应滤波算法仅仅适用于高斯噪声环境.非高斯噪声背景下的信号检测, 通常的做法是先对接收信号进行非线性处理, 以抑制接收信号中的大幅值样本, 然后再进行匹配滤波处理[6].因此一旦环境发生改变, 基于MSE准则的自适应滤波算法性能将严重下降, 而且实际应用中大部分为非高斯环境,其中包括冲激和有色噪声信号.基于以上分析, 为解决基于均方误差准则算法存在的问题, 在过去的十几年里大量的鲁棒性估计模型被提出[7-12], 如基于梯度的最小平均四阶[11]算法、递归最小p范数[13]算法和最小平均p功率[14]算法等.然而到目前为止, 以上提及的鲁棒性自适应滤波算法仍为线性自适应滤波算法, 这些自适应滤波算法的应用仍然主要集中在线性参数滤波器上, 当面对像非线性系统识别[15]和非线性时间序列预测[16]等实际的非线性问题时此类线性自适应滤波算法性能出现严重下降.
针对该问题, 核方法因其具有凸性且较强的非线性建模能力被关注[17], 例如像支持向量机、高斯过程以及正则化网络等[18].近年来核自适应滤波算法(kernel adaptive filtering, KAF)作为一种高效的在线学习算法被广泛研究, 简单来说KAF是线性滤波在希尔伯特空间的实现, 其将非线性问题在输入空间中作为空间变换的凸优化问题解决.传统的自适应滤波算法可被直接内核化变为相应的KAF算法, 如核最小均方误差(kernel least mean square, KLMS) 算法[19]、核仿射投影算法[20]和核递归最小二乘算法[21]等.然而这些非线性自适应滤波算法也都是在假设高斯噪声环境下产生的, 同样不具备抗冲激性以及有色噪声环境下的鲁棒性.α稳定分布是一种典型的非高斯分布噪声, 具有显著的尖峰脉冲特性, 其概率密度函数的衰减过程比高斯分布慢, 表现为较长的拖尾[22], Dai等[23]充分考虑了涉及α稳定噪声分布的长尾分布噪声环境,提出了核仿射投影p范数(kernel affine projection p-norm, KAPP)算法, 该算法代价函数为误差绝对值的p次幂, 当p = 2时算法变为KAP算法,当p = 1时算法变为核最小平均p功率(kernel least mean square p-power, KLMP)算法[24].文献[24]提出的KLMP算法, 主要研究在低概率大幅度的非高斯重尾冲激噪声环境中核自适应滤波算法的性能.之后Dong等[25]在KLMP算法的启发下, 提出了基于分数低阶统计误差准则的抗冲激噪声核分式低次幂自适应滤波(kernel fractional lower power, KFLP)算法, 然而低阶统计量最大的缺点是相比于KLMS算法, 其收敛速度严重下降.
为了进一步提高非线性自适应滤波算法在非高斯噪声以及有色噪声环境下的鲁棒性, 在文献[26]的启发下, 本文构造了一种新的代价函数框架.将核分式低次幂算法的代价函数与Sigmoid函数框架相结合, 并且加入一个比例因子λ, 将该比例因子作为低次幂误差的调节量使算法能够兼顾收敛速度与稳态误差性能.同时考虑到合适的比例因子对算法性能的影响, 提出了基于S型函数的变尺度核分式低次幂自适应滤波(variable scaling factor sigmoid kernel fractional lower power adaptive filtering algorithm, VS-SKFLP)算法来进一步提高了算法的收敛速度与稳态误差, 并讨论分析了算法的稳定性能.由于S型函数的非线性饱和特性可以平滑掉脉冲干扰引起的扰动, 再结合含有比例因子的低阶统计量使所提算法具有良好的性能, 在非线性系统识别和不同有色噪声环境下的仿真结果表明, 本文算法比核最大相关熵算法(kernel maximum correntropy criterion, KMCC)、KLMS算法、和KFLP等其他核自适应算法的性能更优.
2 VS-SKFLP算法原理
假定存在一非线性系统识别问题, 该未知系统必然存在被噪声干扰的数据, 其中噪声干扰包括非高斯冲激噪声和有色噪声.在这种情况下利用误差信号高阶统计量的核自适应滤波算法会遭受性能下降, 因此本文提出一种新的鲁棒性代价函数框架.首先定义一个Sigmoid函数模型:

式中, J (e(i)) 是一个核自适应滤波算法的代价函数, 它是关于误差的函数.从(1)式可以看出当算法的误差值接近于0时该代价函数 Si的值达到最小值; 当算法遭遇非高斯冲激噪声干扰时, 误差突然剧增使代价函数 Si的值接近于1, 这表明该函数模型与一般自适应滤波算法代价函数结构特性一致.据此, 基于该函数模型框架再利用低阶误差准则来推导本文算法, 首先定义一个代价函数形式:

由(2)式可以看出, 接下来本文算法的关键是将J(e(i))的表达式推导出来.给定一个以输入向量u为中心的Mercer[24]核 κ (u,·) 作为再生核, 通常使用的再生核包括多项式核和高斯核, 因为高斯核具有类似于径向基网络的无限逼近性, 所以本文算法采用高斯核作为再生核, 其定义为κ(u,u′)=exp(-h‖u-u′‖2).利用核方法将输入信号通过再生核变换到高维空间, 并且根据Mercer定理任意再生核可以扩展为

u=[u(n),u(n-1),···,u(n-L+1)]T
因此, 输入向量通过非线性映射φ从输入空间U变到希尔伯特空间, 得到映射后的信号φ(u)=[φ(u(n)),φ(u(n-1)),···,φ(u(n-L+1))]T, 根据(3)式得到φ(u(n))Tφ(u(n)′)=κ(u,u′) , 为方便表达令 φ (u(n))=φ(i).基于文献[25]的代价函数:

其中 d (i) 为期望信号, w (i) 为滤波器权重, p为代价函数的幂次, 将(4)式代入(2)式, 就得到了本文算法的代价函数为

将代价函数对权重向量w求导:
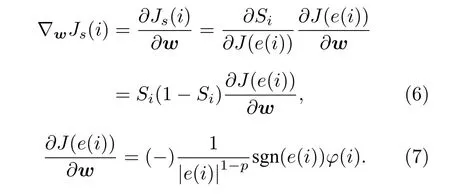
根据负随机梯度下降法更新滤波器权重向量得到本文算法的权重更新公式为
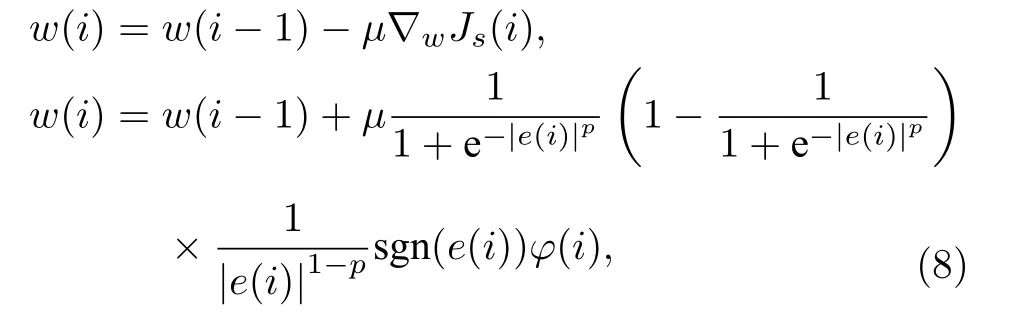
注意到映射φ是一个隐藏函数, 只在算法迭代中体现, μ是算法的步长因子.
因采用低阶统计误差准则使算法收敛性降低,为了进一步提高算法的收敛性, 对SKFLP算法再进行改进.考虑到利用Sigmoid函数的非线性饱和特性和低阶统计误差可以提高算法的鲁棒性, 那么也可以通过调整Sigmoid函数的陡度来提高算法的收敛性.基于此思想在(5)式中引入一个尺度因子 λ >0 , 该尺度因子用来控制 Si的陡峭程度, 那么(5)式变为



图1 不同代价函数曲线Fig.1.Different cost function curves.

图2 不同λ值对代价函数的影响Fig.2.Effect of different λ values on the cost function.
根据以上分析知变尺度因子类似于变步长策略, 保证算法的收敛性能以及稳态误差能够同时提升.因此引入一种类似于文献[27]中变步长方法的变尺度因子策略, 来代替尺度因子的手动设置.可得
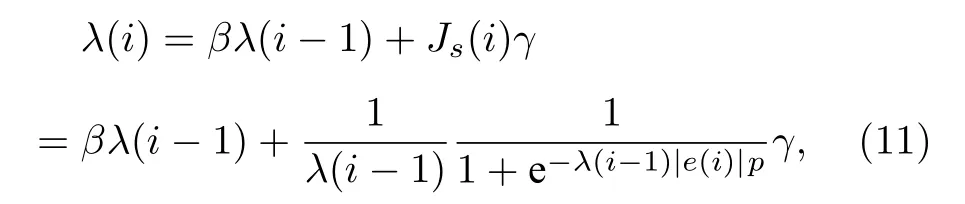
其中 0 <β<1 , γ >0 , β和γ是共同调节 λ (i) 的常数.将变尺度因子表达式代入(10)式便得到了VSSKFLP算法的权重更新公式:
为了说明参数β和γ对算法性能的影响以及后续仿真中的取值原则, 图3(a)和图3(b)所示为在固定 γ =0.001 、改变β以及固定 β =0.1 、改变γ的情况下VS-SKFLP算法学习曲线.从图3(a)可以观察到以下情况: 当 β =0.1 时, 相比于更小的β取值具有较快的收敛速度, 而相比于更大的β取值具有更低的稳态误差.从图3(b)可以看出,并非所有取值都能达到好的学习效果, 当γ取值太大时会使收敛速度过慢, 而取值太小时性能极其不稳定, 只有当 γ =0.001 时算法性能达到最优.所以在本文中取 β =0.1 , γ =0.001.

图3 不同参数β, γ下VS-SKFLP算法的学习曲线 (a) β取不同值; (b) γ取不同值Fig.3.Learning curves of VS-SKFLP algorithm with different parameters of β (a) and γ (b).
3 VS-SKFLP算法的性能分析
利用能量守恒关系, 来分析评价算法的收敛性能.假设存在一非线性系统模型:

其中 wo表示该未知非线性系统的冲激响应, v (i) 为干扰噪声.那么算法的输出误差可以表示为

将(13)式代入(14)式, 即:

其 中 ea(i) 为先 验 误差, w ˜(i-1)=wo-w(i-1) 为权重偏差.将(10)式两边同时减去 wo得到偏差的迭代表达式:

利用相等关系:

得到:

对(18)式两边二范数平方求期望得到能量关系:

解得
为了保证μ > 0, 则存在

因此算法收敛的理论充分条件由(22)式确定.但在实际应用中由于计算复杂, 一般以仿真值为准.
4 模拟仿真与结果分析
为了验证本文所提VS-SKFLP算法的优良性能, 将其与KFLP, KLMS, KMCC算法等其他核自适应滤波算法在被非高斯噪声干扰的非线性系统识别环境下进行比较.实验仿真条件为: 给定一个n时刻随机输入序列 { u(1),u(2),···,u(N)} , 该组数据经过由线性模型和非线性模型组合而成的非线性系统, 并被非线性信道噪声干扰, 其中线性模型为 H (z)=1+0.2z-1, 输出为x(n)=u(n)+0.2u(n-1) , 非线性模型为 g (n)=x(n)-0.6x(n)2,因此该非线性系统的期望输出模型为d(n)=x(n)-0.6x(n)2+v(n) , 其中 v (n) 为额外噪声.本文采用非高斯噪声干扰和有色噪声干扰两种不同的额外噪声来对算法进行分析, 其中非高斯噪声采用高斯噪声与冲激噪声相结合的形式产生.一般的冲激噪声可以被表示为伯努利-高斯过程[24], 由q(n)=a(n)c(n) 表 示, c (n) 是一个伯努利过程,a(n)是一个零均值的高斯白噪声过程, 且设定高斯核函数的核宽参数 h =0.2.归一化均方误差性能曲线被用来评价算法性能, 为了使各算法在最理想的情况下进行比较, 给出了不同算法的参数选择, 如表1所列, 且各参数的选择都是经过交叉验证所得.

表1 各算法参数设置Table 1.Parameter setting of each algorithm.
4.1 本文算法与其他核自适应滤波算法性能比较
将本文算法VS-SKFLP与对比算法用于未知系统的追踪, 并就收敛性和抗冲激干扰性能进行如下比较.
1)在高斯分布噪声下的性能对比.将本文算法VS-SKFLP与传统的KLMS, KMCC, KFLP,SP-KFLP算法在高斯噪声环境下进行比较.实验中假设加性高斯白噪声(AWGN)的均值为0、方差为0.02, 五种算法的NMSE曲线如图4所示.从图4可以看出, 在高斯噪声环境下, 除KMCC算法外本文算法与其他算法均可以达到良好的收敛效果, 但本文VS-SKFLP算法的收敛速度比其他几种算法快, 说明本文算法具有更优的收敛性能.
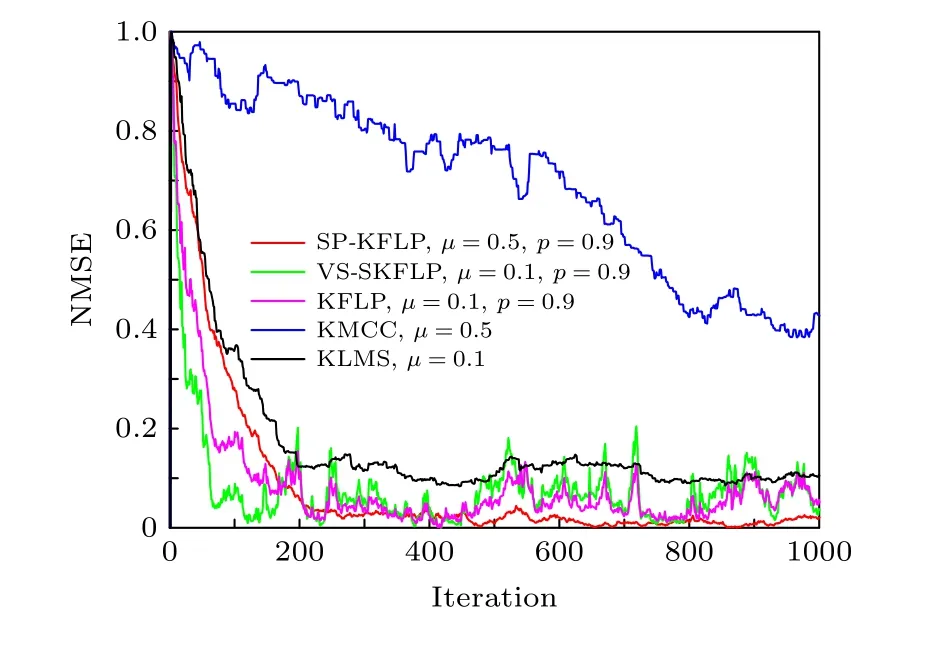
图4 高斯噪声环境下五种算法的性能比较Fig.4.Performance comparison of five algorithms in Gaussian noise environment.
2)在非高斯冲激噪声中的性能比较.将本文的VS-SKFLP与KFLP, SP-KFLP共三种算法在非高斯冲激噪声环境下进行比较.实验中假设存在3%的冲激噪声, 即 pq=0.03.其他参数同上面实验的选择, 实验结果如图5所示.从图5可以看出,KLMS算法的脉冲噪声抑制能力相对较差, 而本文算法和KFLP算法均具有很强的脉冲噪声抑制能力, 但本文VS-SKFLP算法的收敛速度比KFLP算法快.
3)高斯白噪声环境(即 pq=0 )且在第600次迭代时产生一个冲激噪声的情况下, 本文的VSSKFLP算法和其他两种算法SP-KFLP, KFLP的性能对比.参数选择同上面实验, 结果如图6所示.从图6不难看出, 收敛性能基本和图5的结论一致, 另外当冲激噪声产生时, KLMS算法不具有抗冲激噪声的性能, 而本文算法相比于其他算法收敛速度最快, 并且能有效避免冲激噪声干扰.
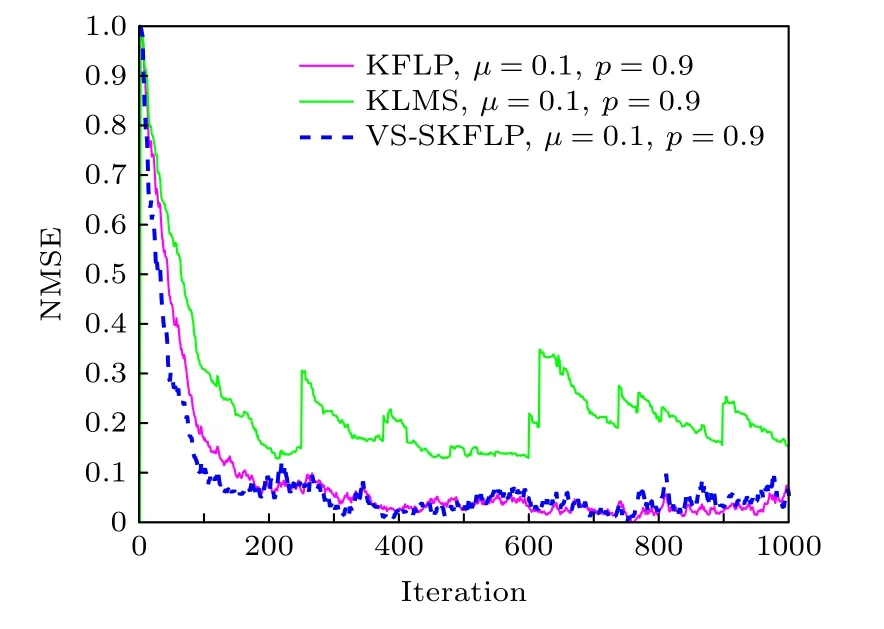
图5 非高斯干扰下的KFLP, KLMS与VS-SKFLP算法性能比较Fig.5.Performance comparison of KFLP, KLMS and VSSKFLP algorithms under non-Gaussian interference.

图6 在第600次迭代过程中加入冲激噪声时各算法性能对比Fig.6.Performance comparison of various algorithms when impulse noise is added during the 600th iteration.
4.2 不同有色噪声环境下算法性能比较
为进一步验证本文算法的鲁棒性, 给出了非线性系统被不同有色噪声干扰下的VS-SKFLP算法的追踪性能.所谓有色噪声是指序列没有一个时刻是不相关的, 与高斯白噪声相比其幅度谱基本一致, 即幅度大小表现相同但频谱却相差较大.如图7为常见的几种有色噪声, 其中包括红噪声、蓝噪声、粉噪声和Violet噪声, 将这四种有色噪声作为系统的额外噪声 v (n) 对算法进行验证, 结果如图8所示.

图7 几种常见的有色噪声Fig.7.Several common colored noises.
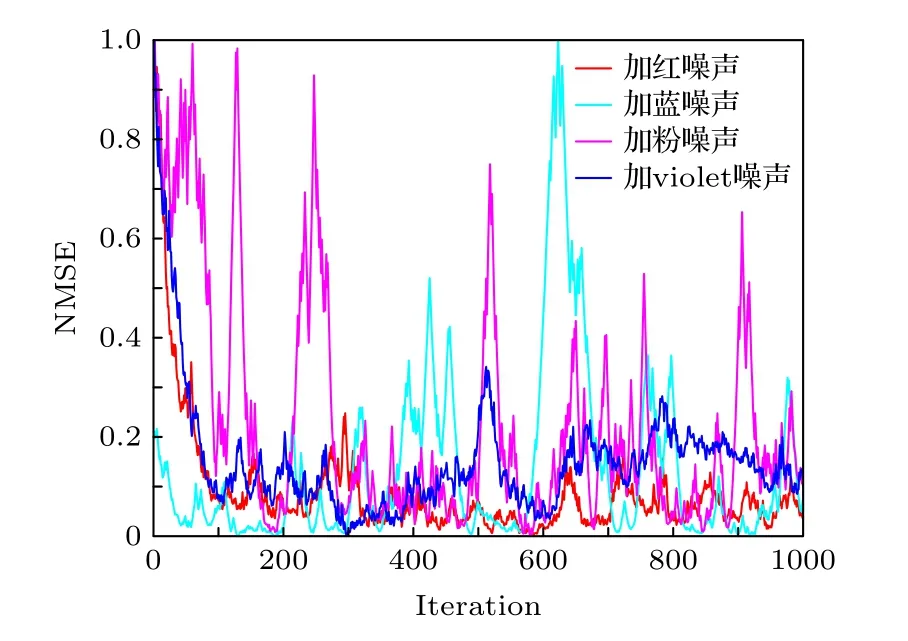
图8 不同有色噪声环境下算法性能比较Fig.8.Performance comparison of algorithms in different colored noise environments.
从图8可以看出, 本文算法对红噪声和Violet噪声具有一定的鲁棒性, 这表明本文算法在一定程度上是可以抵制有色噪声的.但是当噪声为蓝噪声和粉噪声时算法性能严重下降, 后续工作有待进一步的改进.
5 结 论
基于低阶统计准则和Sigmoid函数的非线性饱和特性, 本文通过将核分式低次幂算法的代价函数嵌入S型函数来构造了一种新的代价函数框架,并通过引入的变尺度因子, 进一步有效地提高了核自适应滤波算法在非高斯环境下的非线性系统追踪性能.仿真结果表明, 与KLMS, KMCC, KFLP,SP-KFLP等其他核自适应算法相比, 本文算法不论是在非高斯冲激噪声下还是有色噪声干扰下都具有良好的收敛性能和低稳态误差, 并且在有色噪声环境下具有一定的鲁棒性.当然对于算法在粉噪声和蓝噪声环境下性能下降的问题, 有待进一步的研究与改进.