温室大棚智能采集节点装置设计
2021-08-14蒋兴加
蒋兴加
(广西机电职业技术学院电气工程系 广西 南宁 530007)
随着“互联网+”技术应用的日益普及,我国经济加速迈入数字经济时代,同时也催生着各产业中“物联网”的升级换代。根据温室大棚生产精细管控内在需求,在温室大棚中引入智能管控平台势在必行。智能采集节点装置作为“物联网”的基础层,可实现信息采集、控制决策执行、报警和通讯功能,为提升温室大棚生产系统的安全、高效、实用性提供有效支撑。
1 系统方案分析
为提升温室大棚管控和数据通讯性能,基于物联网架构,引入分布式计算机体系结构,温室大棚管控系统如图1所示。
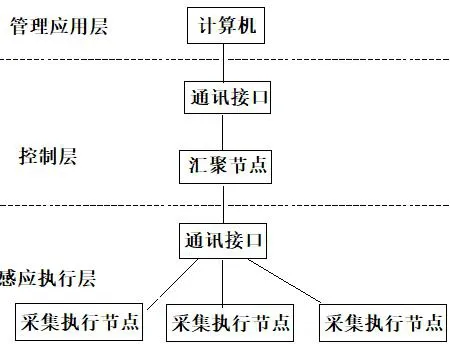
图1 温室大棚管控系统结构示意图
控制系统分为管理应用层、控制层和现场感应执行层[1],充分发挥了分布式系统集中管理、监视、操作和分散控制的优势。将计算机作为管理应用层具有资源丰富、功能完善等优点,便于系统的操作、管理、监视。设计管理应用层与控制层之间的通讯时,采用快速可靠的 TCP/IP方式。控制层的汇聚节点作为管理应用层和感应执行层的中转站,可实现数据的上传下达。感应执行层可实现现场数据的采集和控制动作的具体执行,提升系统的安全可靠性。设计汇聚节点和采集节点的数据通讯时选用LoRa无线通讯技术。该技术具有低功耗、远距离、成本低等优点,特别适合温室大棚系统。
2 采集节点装置硬件设计
温室大棚的主要作用是确保作物的高效、高品质生长,除了监控常规的水、肥、土壤等基本要素外,还需要对温度、湿度、光照、二氧化碳浓度等指标进行监控。根据采集和控制的功能要求,智能采集节点装置以微处理器为核心,实现温度、湿度、光照、二氧化碳浓度的检测,以及水、加热、光照、排气的控制。采集节点模块的硬件构成,如图2所示。
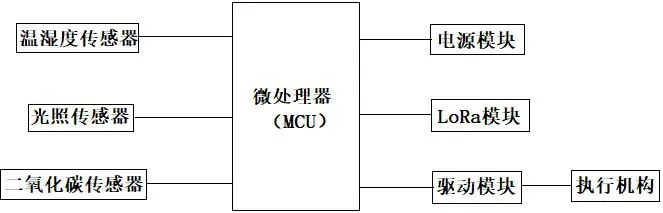
图2 采集节点模块方框示意图
该模块选用Microchip SAMD21微处理器,采用基于Arduino开源电子原型平台,具有跨平台、开发简便高效等特点。SAMD21微处理器主频为48 MHz,有256KB flash和32KB SRAM,有20个通用GPIO以及通讯接口,能满足采集节点的功能和性能要求。选用远洋科技开发的LoRa通讯模组为LoRa模块,具有体积小、功耗低、传输距离远和抗干扰能力强等特点,可方便快速、灵活地进行产品设计。
选用基于数字模块采集技术和温湿度传感技术开发的DHT11为空气温湿度传感器,具有品质卓越、超快响应、抗干扰能力强、性价比极高等优点。选用YL69[2]土壤湿度传感器,有数字比较输出和模拟信号输出两种方式,方便实用。选用HA2003光照传感器,利用先进光电模块,将光照强度转化为模拟信号输出。选用韩国SOHA生产的SH-300-DS型二氧化碳传感器,具有适应高湿度环境等特点,可输出模拟和数字两种信号。选用固态继电器驱动模块,实现开关或PWM控制输出,完成水、肥、光照、排气对应执行机构的控制。
3 采集节点装置软件开发
3.1 控制方案
采集节点装置的软件主程序开发流程如图3所示,先将系统进行初始化配置,然后不断采集数据,经MCU处理之后通过LoRa无线模块发送到汇聚节点,同时根据检测的数据结果,按照温室大棚生产条件,输出控制和报警信号,确保温室大棚各指标性能良好。
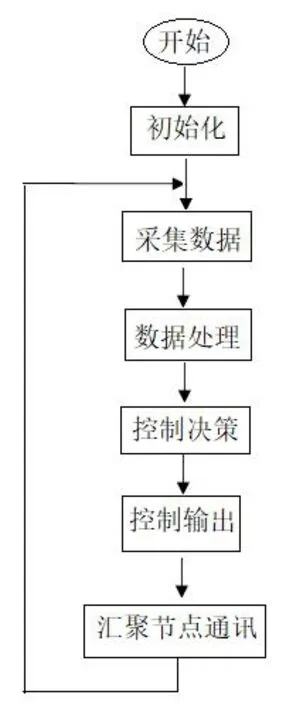
图3 主程序开发流程图
为提高系统抗干扰能力,将温度、湿度、光照、二氧化碳浓度采集的数据基于3次平均滤波处理,以提高数据精度。汇聚节点基于LoRa通讯协议控制多个采集节点。将数据传输方式设置为透明传输模式。在该模式下,只要模块的地址相同、信道相同、无线速率相同,就可高效地实现无线通讯。由于模糊控制具有适应性强、容错能力高、采用自然语言开发等特点[3]。为提升控制精度,将控制方案由传统的通、断两位控制改进为模糊控制算法(FCS)。
3.2 模糊控制算法
模糊控制算法(FCS)是指从输入的连续精确量中,利用模糊推理,求出相应输出清晰值的控制算法。选用适用于实时控制的Mamdani推理方法,模糊控制算法步骤为:输入精确量的模糊化处理;模糊规则及模糊控制规则表的确定;模糊输出控制量的清晰化。由于一维模糊控制具有简便、高效、实用特性,因此将智能采集节点有关指标的控制方案设计思路确定为基于一维模糊控制。
3.2.1 清晰量模糊化
(1)语言变量和语言变量值。一维模糊控制器输入语言变量为误差信号e,输出语言为光照、排气、灌溉所需的控制量。为兼顾控制精度和效率,模糊语言的子集均由“正大”(PB)、“正中”(PM)、“正小”(PS)、“零”(Z)、“负大”(NB)、“负中”(NM)、“负小”(NS)7个模糊词集组成。
(2)语言变量隶属函数的设定。由于三角形隶属函数具有高分辨率、高灵敏度的控制特性,适合系统控制高性能的需要。采用三角隶属函数的模糊控制,其三角隶属函数变量的隶属度计算如式(1)所示:式中的a、b、c为模糊变量集的论域范围,由三角隶属函数曲线确定。

(3)清晰量转换为模糊量。误差e和控制量都需从基本论域通过量化转换到离散论域,即连续的隶属函数转换为离散点的隶属值,采用赋值表的形式揭示清晰量和模糊量的转换关系。
3.2.2 模糊控制规则
Mamdani推理的CRI法,其控制规则形式为:If E=AiThen U=Cj,其中i=1,2,…m,j=1,2,….n,规则由专家和现场经验确定,得到模糊关系R。模糊控制规则利用模糊控制响应表(FCT)揭示输入与输出之间的关系,再根据已知的输入模糊量Ai,通过模糊关系R,求出对应的控制量。
3.2.3 模糊控制规则响应表(FCT)
FCS有多种实现形式,主要有合成推理的查表法、合成推理的解析公式法、合成推理的关系矩阵法。由于查表法能大大提高模糊控制的实时效果,又能节省内存,因此选用查表法为模糊控制算法,将基于专家知识和实际工程经验的运行规律作为模糊控制规则。
3.2.4 模糊量清晰化
将从模糊控制器FCT表所得的模糊量清晰化,可得到精确输出值。清晰化方法有重心法(centroid)、最大隶属度法(Mom)、中位值法(bisector)。选用简单实用的Mom法进行反模糊化处理。
3.3 程序开发
将模糊输入、输出变量的模糊关系、模糊规则和控制响应表事先离线存放于微处理器的存储器中。选用查表法为模糊算法不仅能提升系统实时性,还能降低系统对硬件的要求。模糊查表算法流程如图4所示。

图4 模糊查表算法流程图
程序基于ArduinoIDE平台及wiring语言开发,核心子程序主要包括系统初始化、参数采集、数据处理、模糊控制算法(FCS)和LoRa通讯代码。初始化子程序主要用于设置通讯参数、指标给定值、参数采集、模糊控制表;参数采集子程序主要完成周期性获取温度、湿度、光照、二氧化碳浓度的实际值;数据处理子程序主要完成采集参数的抗干扰处理和模糊化处理;模糊控制算法子程序主要完成模糊决策、指导执行机构相应动作及报警;LoRa通讯子程序主要完成采集节点与汇聚节点的双向数据传输,为系统监控提供桥梁。
4 结论
为提升传统温室大棚的管控和通讯性能,笔者基于物联网架构,设计开发了智能采集节点装置,该装置通过对温度、湿度、光照、二氧化碳浓度数据的采集,进行抗干扰处理,提高了所采集数据的精度。将执行机构的通、断两位控制改进为模糊控制后,具有良好的抗干扰性和优越的动、静态性能。将有线通讯调整为LoRa无线通讯,减少了布线并提了高效率。试验结果表明,该装置有效提升了工作对象的性能,有较好的自适应性和实用价值。
