种蛋智能筛选系统的设计
2021-08-13胡思旋于亚萍
胡思旋,刘 源,李 峰,于亚萍
(天津农学院工程技术学院,天津 300384)
1 系统的工作原理
系统是由控制器、称重模块、传送带控制模块、图像采集模块、机械臂控制模块组成。控制器控制压力传感器检测禽蛋质量,控制机械手去除不合格的禽蛋,将合格禽蛋放置传送带,完成初步筛选;控制器控制传送带至摄像头,采集禽蛋图像,传送到PC机,利用Matlab软件对禽蛋图像进行分析和处理,判断其新鲜度,不合格和合格分别以0或1表示。利用Matlab的Tmtool工具与Arduino取得连接,将0或1发送到Arduino的串口缓冲区,再将数据发送至Arduino控制器,控制机械臂完成相应动作实现禽蛋分拣。实现对禽蛋孵化前的优质种蛋的选择。
2 系统的硬件设计
2.1 控制器
控制器采用Arduino UNO,基于ATmega328P单片机的开发板。具备14路数字输入/输出引脚(其中6路可用于PWM输出)和6路模拟输入。工作电压为5 V,驱动电流最大为50 mA。
2.2 称重模块
2.2.1 称重电路
称重电路由压力传感器、24位A/D转换器芯片HX711模块、Arduino芯片组成。压力传感器采用电阻应变片式压力传感器。可将被测件上质量的变化转换成为电压传送给A/D转换器。HX711模块具有高精度、速度快、抗干扰性强的特点,将电压转化成数字量后,传送给Arduino单片机。单片机与标准种蛋质量相比较,控制机械手抓取动作。
2.2.2 称重机械手
称重机械手用来抓放禽蛋,完成禽蛋质量筛选。由主动爪机构、从动爪机构、基座、2个sg90舵机组成。抓握动作由舵机带动主动爪,再通过齿轮传动带动从动爪完成。舵机顺时针转动机械手完成“抓”的动作,反之完成“放”的动作。筛选动作由舵机带动基座完成。在质量范围内的鸡蛋将会由舵机带动基座,机械手将鸡蛋放到蛋槽里进入传送带,进行第2步筛选。
2.3 图像采集模块
图像采集模块由摄像装置、Arduino控制器组成,控制器负责定位控制、图像的获取、图像向上位机的传输。摄像装置由USB高清免驱800万像素自动对焦像头、暗箱、灯箱组成[1]。暗箱提供不透光的拍摄环境,摄像头负责拍摄鸡蛋照片,灯箱由箱体、光源、灯泡支撑架、底座构成,负责照射待拍照的鸡蛋。
2.4 传送带控制模块
2.4.1 传送带机械结构
选蛋系统的机械结构见图1。传送带的搭建由挡板、支撑板、转轴、皮带、电机构成。两侧的挡板负责固定转轴与电机。支撑板负责稳定传送带并给皮带提供一定的支撑力。

图1 系统机械结构Fig.1 The system mechanical structure
2.4.2 电机控制
系统采用42步进电机17HS4401S和驱动器TB6600完成控制。传送带的定位是由电机脉冲数来决定,高电平与低电平的时间和为一个脉冲,本次使用的42步进电机每给一个脉冲转动1.8°,转轴转动1周需要200个脉冲,本次控制精度只需设置调为4细分,即步距角为0.45°,根据实测显示电机每转动1°传送带前进0.5 mm,当蛋托与摄像头垂直时,需要传送带前进200 mm,电机转动400°即890个脉冲。
2.5 机械臂控制模块
机械臂采用6自由度机械臂可编程拼装机械手臂stm32ArduinoUNOR3,由6个舵机控制6个自由度的转动,采用Arduino舵机控制器,在线运行模式。当Matlab通过串行口将0或1信息发送到Arduino的硬串口时,单片机控制机械臂完成相应动作实现禽蛋的分拣。
3 软件设计
3.1 主程序设计
主程序设计流程见图2。称重控制程序完成,禽蛋质量的采集与标准质量比较,完成禽蛋分拣。传送带控制程序完成,传送带电机的定位控制。当禽蛋到照射位置时,向单片机发出定位信号,触发摄像头动作,调图像采集与处理程序。
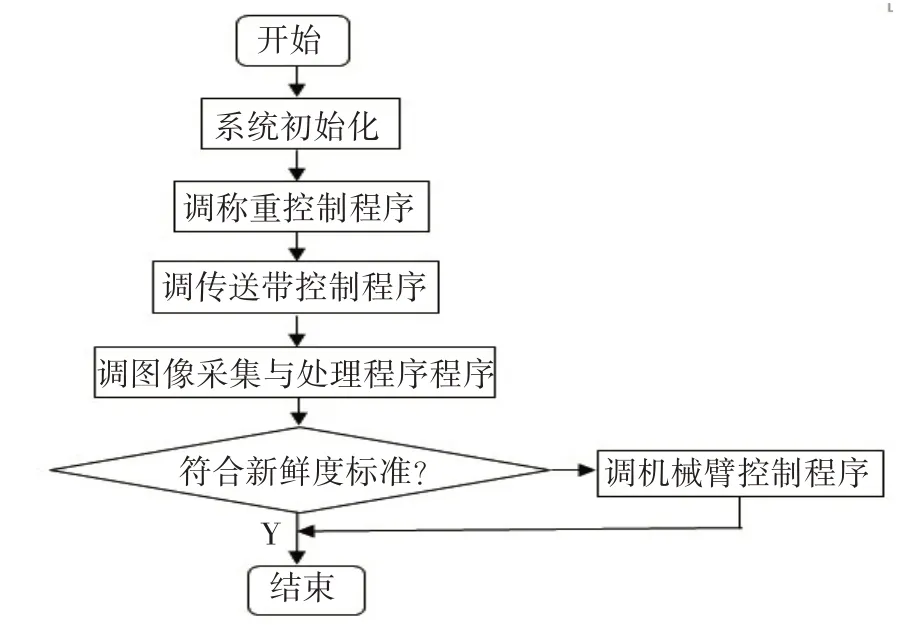
图2 主程序设计流程Fig.2 Theflow chart of main program design
3.2 上位机与Arduino之间的通信
用Matlab软件对鸡蛋图像分析后,将得到的新鲜度结果以0或1的形式输出。利用Matlab的Tmtool工具与Arduino串口通信,将0或1发送到Arduino的串口缓冲区,然后向机械手发出执行命令。
3.3 机械臂控制程序
当接收到Arduino发出的分拣执行命令后,启动不同的舵机,执行动作指令。当收到0,将禽蛋剔除;若是1,将禽蛋放入孵化环境进行孵化,实现鸡蛋的筛选。
4 系统测试
4.1 调试条件
系统调试是在Windows10系统下,运用ArduinoIDE软件串口监视器以及Matlab软件,Arduino、USB高清免驱800万像素自动对焦摄像头和各种执行部件到位下完成的。
4.2 调试方法
随机选取30枚鸡蛋作为实验样本,要求蛋壳表面无污物,外表光滑且没有裂纹。实验样品随机分为5组,每组6个,将每个样品标以序号区分,统一放置在相同环境中贮藏[2]。
启动系统,自动完成2级筛选。其中,图像处理新鲜度筛选采用,用Matlab软件对采集到禽蛋图进行预处理、提取鸡蛋特征值、气室特征值,并对特征参数进行计算等处理。
禽蛋新鲜度相关的3个特征参数为气室面积比、气室高度比、气室直径,建立图像提取参数与实测参数的一元哈夫值回归模型[3]。该一元回归模型的相关系数为0.96,拟合优度为0.92,气室面积比与哈夫值存在明显的相关性,气室面积比越小,鸡蛋的哈夫值越大,证明鸡蛋越新鲜。不新鲜禽蛋用0表示,新鲜为1。
5 结语
系统运行后,禽蛋的质量和新鲜度特征参数及检测结果均能在上位机界面显示。禽蛋的分拣准确率能达到98.7%,系统运行正常。该系统操作简单,易于推广。为禽蛋孵化过程全自动化打下基础。
