基于偏最小二乘回归的潜艇航渡区威胁度量化*
2021-08-12何青海王小龙吴文龙
何青海 王小龙 吴文龙
(1.海军潜艇学院 青岛 266199)(2.92192部队 宁波 315122)
1 引言
指挥决策的及时性和准确性是衡量指挥决策能力的关键指标。及时性要求在最短的时间内能够为指挥员提供决策依据,而准确性则要求在综合各种决策建议的前提下,进行最优决策。为此,提出基于偏最小二乘回归的潜艇航渡区威胁度计算模型,通过回归模型量化专家知识,为融合专家知识到辅助决策系统提供一种新的思路,实现根据战场态势,快速量化对潜艇威胁,提升对潜艇指挥决策的效能。
在建模过程中,为了更完备准确地描述系统,尽可能不遗漏任何与系统有关的因素,因此分析人员往往倾向于全面选取问题相关因素,而定性分析很难确保因素之间相互绝对独立。因素集合内部存在较高程度的相关性时,自变量存在多重相关性,通常会扩大模型系数的估计误差,致使模型参数或权值随意变化,破坏模型的稳定性。偏最小二乘回归模型能够有效解决多重相关性带来的影响[1],而且在数据样本较少的情况下可实现对潜艇威胁度的量化,适用于解决战场威胁量化的问题。
2 问题分析
层次分析法[2~5]刻画了人类的一般认知过程,因此采用层次分析法对威胁潜艇安全、隐蔽的相关因素进行分析和提取,而相关因素集是问题分解后的离散形式,通过数据表达特定的问题,所以威胁量化属于典型的数据驱动问题。
2.1 相关概念
首先,从潜艇的安全性和隐蔽性的角度引入了威胁空间、威胁度的概念:
潜艇航渡区威胁空间(威胁空间):由各种搜反潜手段、海上人为活动、航行海区地理环境等,可能对潜艇保持安全、隐蔽造成损害的因素集合。因素集合中的子因素称之为威胁因素,且威胁因素之间可存在弱相关关系,威胁因素集合构成了威胁空间。
潜艇航渡区威胁度(威胁度)是量化指定的时间空间范围内,各威胁因素对潜艇构成威胁的程度。威胁度具备以下属性。
1)属于动态威胁量化指标,随战场态势变化动态调整;
2)威胁度侧重于表示对潜艇安全、隐蔽的威胁程度;
3)威胁度包含了自然环境造成的被动威胁。
2.2 基于栅格法的方案集划分
不同的海区对潜艇的威胁程度存在一定的差异,为了精确表示敌反潜活动、自然环境等威胁因素对潜艇威胁度在地理空间的分布,文中采用栅格法划分潜艇航渡区,得到相应的子海区,使得威胁度计算变得可行,并且可以控制威胁度量化的精度。其中,栅格法是指将指定的地理空间范围以指定二维正交方向向量为基准,按相同步长将海区划分成等面积的栅格节点,可以根据环境数据精度、指挥需求等条件指定栅格划分的粒度。
2.3 威胁因素集及量化方法
威胁因素是衡量战场威胁大小的准则。威胁因素有定性和定量之分,定性威胁因素的评价值需要依靠专家主观判断,定量威胁因素的评价值是通过相应的威胁隶属度函数计算得到。
2.3.1 威胁因素集
从潜艇航渡区域的海上搜反潜活动、海区地理环境的角度分析威胁潜艇安全、隐蔽的主要因素:威胁因素集U={γ1,γ2,γ3,γ4,γ5,γ6,γ7,γ8,γ9,γ 10,γ11,γ12}={确定敌情威胁、模糊敌情威胁、深度、风级、浪级、能见度、跃层、海流、昼夜、通航密度、障碍物密度、航道宽度},如图1所示。
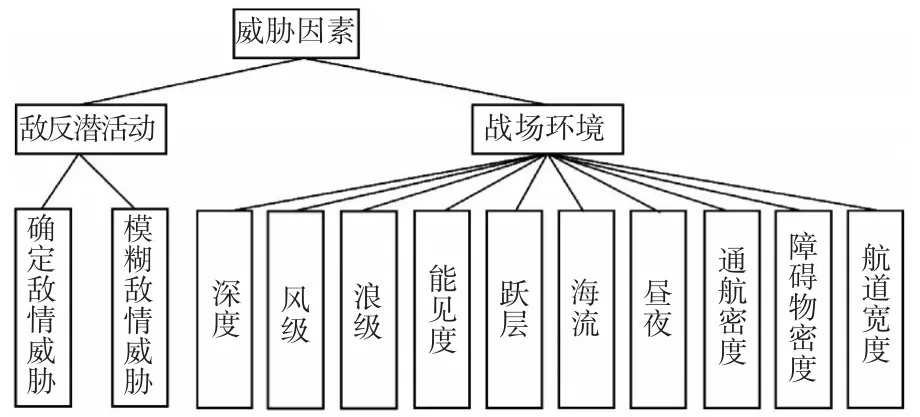
图1 威胁因素层次划分
2.3.2 威胁因素量化
根据威胁因素的性质,文中将模糊敌情威胁、风级、浪级、能见度、海流、障碍物密度设置为定性因素,将确定敌情威胁、深度威胁、跃层、昼夜、航道宽度属性设置为定量因素。其中,由于多数威胁因素对威胁度的影响并非是单纯的有利或不利,而是具有利多弊少或者是利少弊多特点。因此,对于利多弊少的威胁因素可以认为总体上利于减少威胁度,应属于效益型因素,反之,利少弊多的威胁因素属于成本型因素。从威胁增加的角度,将确定敌情威胁、模糊敌情威胁及障碍物密度归为成本型属性,将深度、风级、浪级、能见度、海区通航密度归为效益型属性,成本型因素和效益型因素量化标准是互反的。
1)定性因素量化方法
定性类型威胁因素以专家的定性分析结论为依据进行量化,考虑到专家主观决策的模糊性,将专家的语言评价转换成对应的三角模糊数,主观评价值对应的三角模糊数如表1所示。
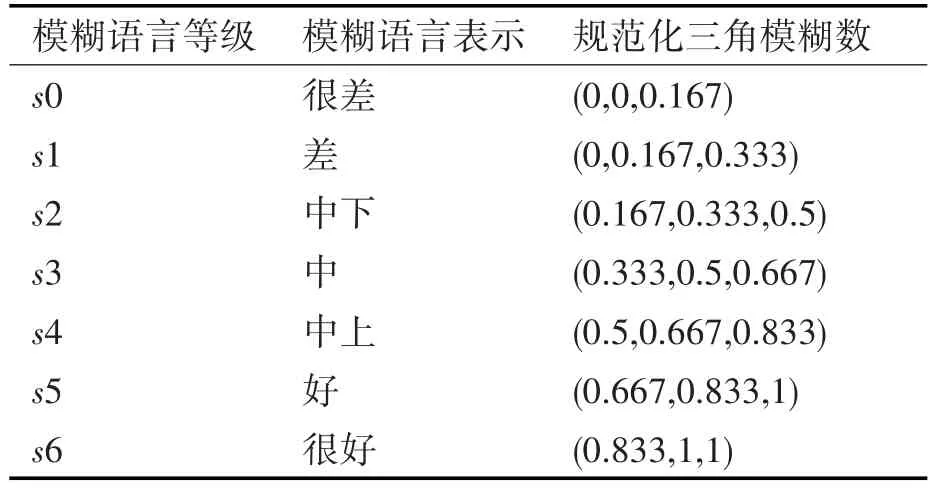
表1 语言评价集转化为三角模糊数
2)定量因素量化方法
(1)确定敌情威胁因素
潜艇越容易被反潜兵力发现,安全性和隐蔽性就越差,文中使用反潜兵力发现潜艇的最大概率作为确定敌情威胁的威胁隶属度,如式(1)所示。

其中,P发现为确定敌情威胁的威胁隶属度,如式(2)所示。

如果有多个确定的威胁源,采用式(3),计算多威胁叠加后的威胁隶属度。

其中,pi为第i个确定威胁源的威胁隶属度。
(2)深度因素
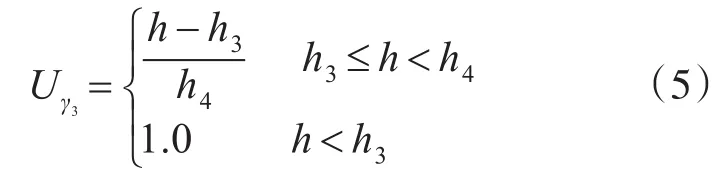
潜艇保持隐蔽性与海区深度有关,深度越大,潜艇的隐蔽性越容易得到保证。若假定潜艇受到的威胁同海区深度之间呈现近似线性关系,即海区深度越大,潜艇受到的威胁度越小。设潜艇吃水深度为h1,安全深度余量为h2,潜艇极限深度为h4,海区深度为h,h3为潜艇的最小可航行深度,并满足式(4)所示条件。

当海区深度满足潜艇可航行的条件时,h越大,γ3的威胁隶属度越小,如式(5)所示。
(3)跃层以及昼夜因素
跃层及昼夜因素并不存在明显的好与坏变化的界限,它与潜艇指挥员的具体运用方式与水平有关,因此若存在此项因素,则其威胁贡献度为0,反之为1。

(4)航道宽度因素
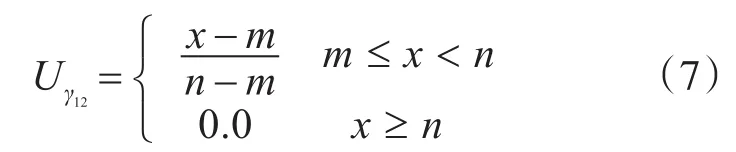
航道宽度是指具有必要水深的航道海底宽度。若船舶行驶的航道比较狭窄,则容易发生岸推、岸吸和浪损等现象,从而导致船舶碰撞、触岸、搁浅等事故,因此该因素直接影响潜艇的航行安全。同时在狭窄航道,敌安装水下监听系统等反潜设施的概率比较大,对潜艇安全、隐蔽通过存在一定的威胁。文中将最小可航的航道宽度设为m海里,假定当航道宽度大于n海里时,认为该航道对潜艇航行安全没有影响,其威胁隶属度如式(7)所示。
3)风险偏好因子
不同专家主观判断在风险偏好上存在一定的差异,即不同专家的相同定性评价对应的威胁度判断存在差异,为了体现这种差异对模型的影响,引入了风险偏好因子量化专家决策的风险偏好,将三角模糊数转换为实数形式,使得模型计算变得可行。
设ξ表示风险偏好因子,a=(al,am,au)表示对应于专家评价的三角模糊数,采用式(8)将三角模糊数转换为实数形式的威胁度,当ξ=0.5时,专家威胁度判断值为表1中三角模糊数的中间值am。

为了防止威胁度出现极值,造成计算得到威胁度与定性判断出现较大偏离,从而产生离群值,因此引入三角模糊数隶属度函数[3],用于计算威胁度与表1定义评价集的偏离度,如式(9)所示。
其中,ua为T的隶属度评价值。为了防止风险偏好因子出现较大偏差,引入风险因子调整函数,如式(10)所示。
其中,ξold,ξnew分别为调整前后的风险偏好因子,[γl,γu] 为三角模糊数隶属度阈值,γΔ为调节系数,通过调节系数动态调整相应的风险偏好因子,实现对出现较大偏差威胁度的调整。
3 偏最小二乘回归[6~12]
3.1 基本原理
偏最小二乘回归算法的目的是寻找自变量和因变量之间的统计关系,设自变量矩阵为X={x1,x2,…,xq}n×q,因变量矩阵为Y={y1,y2,…,yp}n×p,首先对X进行成份分解,如式(11)所示。

计算自变量矩阵Y关于T的回归,如式(12)所示。

其中,T∈Rn×a为得分矩阵(score matrix),P∈Rq×a为负荷矩阵(loading matrix),Q∈Rp×a为回归系数矩阵,E∈Rn×q、F∈Rn×p为残差矩阵。
在满足精度要求基础上,计算T、X的回归系数矩阵W,如式(13)所示。

由式(11)、(12)、(13)得到X,Y的回归模型,如式(14)所示。

3.2 具体实现步骤
步骤1:数据标准化处理,包括数据中心化和方差归一化处理。数据中心化如式(15)和(16)所示:
其中,Xi、Yi为第i次迭代对应的自变量、因变量矩阵,mean()、std_var()分别表示计算数据集属性维度上的均值和标准差。
步骤2:计算自变量和因变量矩阵的第一对主成份t1和u1,要求t1和u1方差最大的同时,满足二者之间有最大相关性条件,使得t1和u1在保留了数据主要信息的同时,二者之间有较强的可解释性,将上述条件表示为式(17)所示形式。

其中,X0w1=t1,Y0c1=u1。
由式(17)可得:

其中,λ1,u1分别为最大特征值,w1,c1为最大特征值对应的特征向量。
步骤3:建立回归模型,计算主成份与自变量、因变量之间的回归系数矩阵和残差矩阵。
其中,p1、q1为回归系数矩阵,X1、Y1为残差矩阵。
由式(19)、(20)得到回归系数矩阵。


步骤4:判断残差是否满足精度要求,若不满足,则用残差矩阵代替原数据矩阵,采用迭代计算的方式,直到残差满足精度要求。
步骤5:建立因变量矩阵与自变量矩阵间的回归,经过r次步骤1至步骤4的迭代计算,得到结果形式如式(23)、(24)所示。

其中,Xr,Yr为r次迭代后残差,t为式(25)所示形式。

其中,tk为第k次迭代的得分矩阵,形式如果式(26)所示。

其中,wi为第i次迭代对应的Xi-1自变量矩阵的主子空间,满足式(27)所示形式。

结合式(24)、(26)得X0,Y0的线性回归模型:
由式(29)可知,W*Q为X0和Y0的回归系数矩阵。
4 算例
上级命令某潜艇赴指定作战区域执行任务,从潜艇航渡区中任意选择6个栅格节点计算其对应的威胁度,为了简化篇幅,直接给出了各威胁因素对应的威胁隶属度值。表2为上述栅格节点在各因素下的评价值构成的威胁因素评价矩阵,设样本x1~x6对应的威胁度为{0.59,0.23,0.65,0.6,0.85,0.05}。其中,威胁度在[0,1]范围内取值。
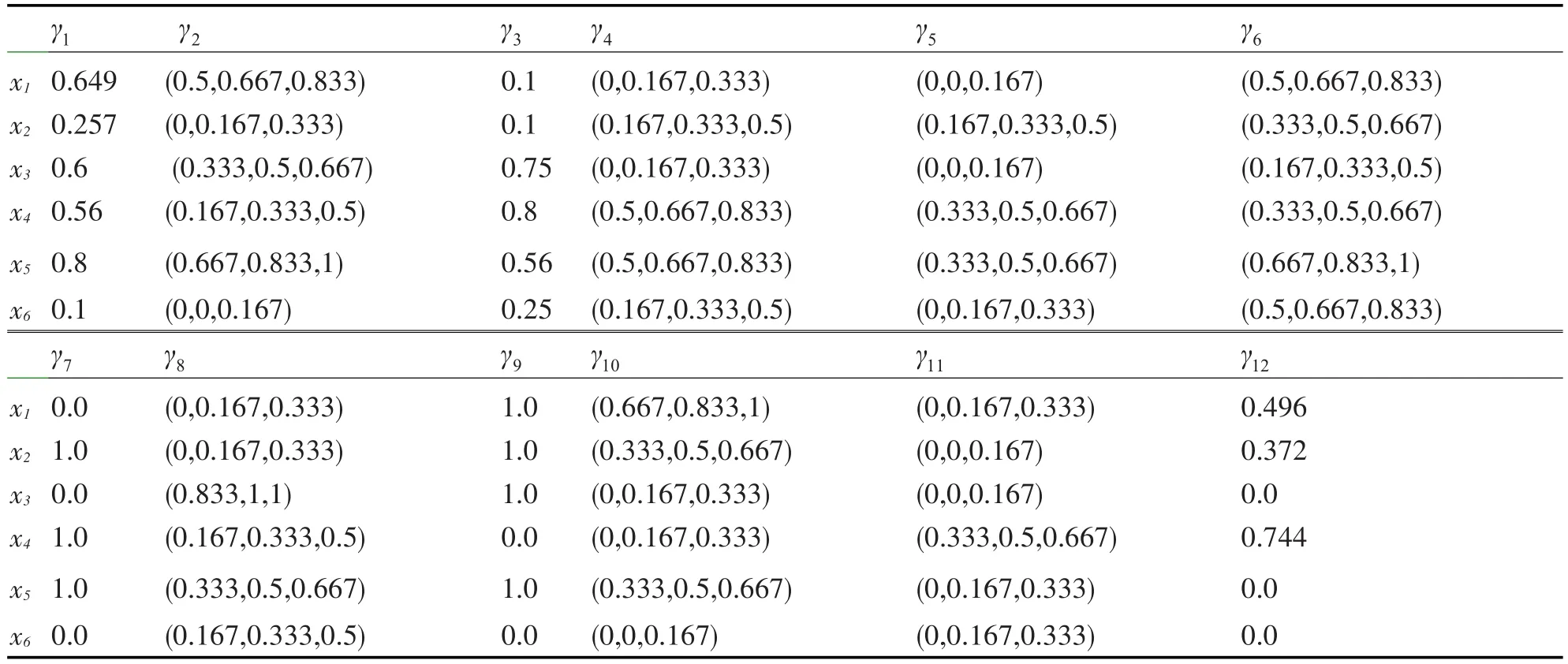
表2 威胁因素评价矩阵
步骤1:将威胁因素评价矩阵中三角模糊数转换为实数,构成可用于模型计算的实数矩阵,设风险偏好因子ξ=0.6,得到实数矩阵如表3所示。

表3 威胁因素评价矩阵
步骤2:采用偏最小二乘回归模型,计算回归系数矩阵,结果如表4所示。
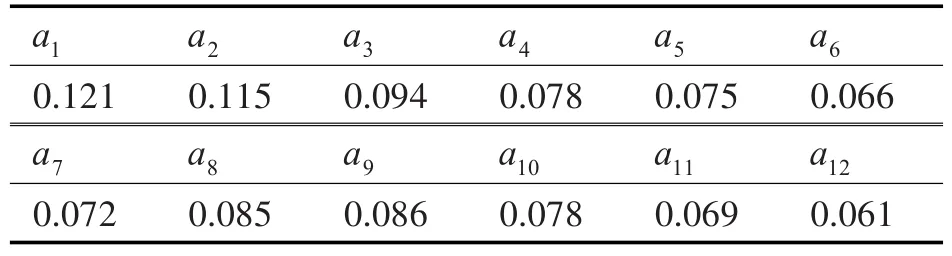
表4 回归系数矩阵
表4中所示回归系数矩阵实际上体现了各威胁因素之间的重要程度,从结果可以看出,确定敌情威胁、模糊敌情威胁以及深度威胁因素的重要程度明显大于其他威胁因素,其中确定敌情威胁的重要程度最大,其余a4~a12威胁因素重要程度则比较接近,由此可知计算得到的回归系数能够刻画上述假定数据所描述的威胁分布特征,能够以量化的形式融合专家决策知识。
5 结语
快速、精确量化战场态势对潜艇安全、隐蔽的威胁程度,是辅助决策系统的重要功能,是提升指挥决策的重要途径,因此提出了基于最小二乘回归的潜艇航渡区威胁度量化模型,最后通过算例初步验证了模型的有效性。由于该威胁度量化模型属于数据驱动模型,需要构建可靠、样本类型分布均衡的模型训练数据,这是下一步研究工作的重点。
