高动态目标快速捕获的实现方法
2021-08-11刘增茂吴海洲冀云成
刘增茂,吴海洲,冀云成,李 伟
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.西安卫星测控中心,海南 三亚 572011;3.中国人民解放军93160部队,河北 石家庄 050081)
0 引言
探月三期返回器返回地面是最复杂、最重要和最紧张的阶段,在一定程度上决定探月三期任务的成功与否。返回器从绕地轨道返回地面,一般要经历4个阶段:制动段、过渡椭圆段、再入段和着陆段。其中再入段是关键中的关键,同时也是测控最为困难的。探月三期返回器以“打水漂”的方式安全返回地球,造成了返回器轨道的不确定性,给地面天线捕获目标造成极大困难。另外,因返回器进入大气层时会产生黑障现象,造成返回器的信号中断,使测控捕获跟踪和测量难度大大增加[1]。
针对探月三期返回器高速再入测控任务特点:返回器具有轨道不确定性和信号传输有黑障现象。返回器信号起伏变化较大,甚至有闪烁,信号电平较弱,多普勒变化动态极大,角动态很大,造成目标捕获困难[1-3]。对于大动态目标的捕获需要天线具有宽波束特性;而微弱信号的接收需要天线具有高增益、窄波束。
对于传统纯机械跟踪天线,一般为单波束天线,要实现大范围的目标搜索,一方面,由于受机械轴(方位轴和俯仰轴)转速的限制扫描时间较长,另一方面,由于运动惯性天线扫描方向调转也需要一定时间,而且反复调转天线扫描方向对轴承齿轮造成不可逆的损伤,影响天线使用寿命;纯电扫描方案优点是波束指向迅速可以捷变,无动态滞后,可做到“指哪打哪”,因此要实现全空域快速目标搜索,采用全电扫描体制是最优技术方案,但全空域电扫需要阵列数量规模巨大,建设成本特别高,对于实现20°×20°空域范围的要求,其工程性价比不高,没有采用。
本文提出了一种采用机械+电扫跟踪的多波束综合体制方案,电扫描范围±10°,机械跟踪范围方位±355°,俯仰1°~179°,满足全空域卫星测控使用要求。利用4个电波束以较低成本解决了20°×20°空域扫描问题。实现快速目标捕获方案,解决了返回器再入段的快速捕获测控技术难题,设备在执行嫦娥返回器试验任务中表现突出,性能优异。
1 高动态快速目标捕获原理
利用机械+相控阵多波束阵列天线实现高动态快速目标捕获系统组成框图如图1所示。系统由机械+相控阵多波束阵列天线、多通道下变频器、中频开关矩阵、多通道信号检测模块、目标捕获模块、快速跟踪模块、波束控制软件以及传统的天伺、信道、基带、时频和监控等设备组成。本节主要介绍高动态快速捕获原理。
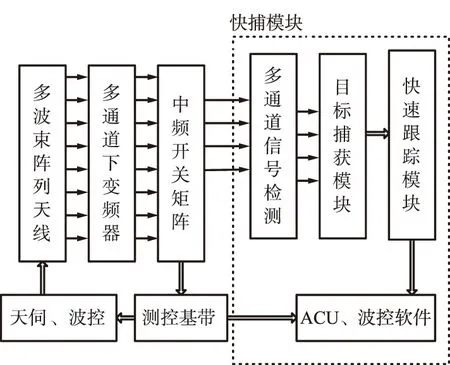
图1 基于多波束相控阵的目标快速捕获原理框图Fig.1 Principle block diagram of fast target acquisition based on multi beam phased array
利用4个接收波束并行完成20°×20°空域内的目标捕获[2],其捕获过程如下:
① 天线机械轴控制单元(ACU)根据轨根或引导数据控制天线指向预定空域。
② 快捕工作流程如图2所示,利用4个接收波束实现覆盖20°×20°空域扫描。每个接收波束通过多次快速指向完成10°×10°空域的扫描,同时完成多通道信号检测,利用快速FFT搜索目标信号[3-4],将记录检测到信号的强度和位置送给目标捕获模块。
③ 目标捕获模块对4个接收波束的检测结果进行综合处理完成目标的判决和捕获。并对目标的空域位置信息送波束控制快速跟踪模块实现电波束跟踪,快速跟踪模块同时引导ACU实现天线机械轴随动逐渐接近目标[5]。
④ 当天线机械轴的指向进入目标主波束内之后,ACU完成天线机械轴闭环跟踪。如果天线机械伺服无法完成闭环自动跟踪,则波束控制软件重新进入多波束扫描搜索目标程序;若天线机械伺服闭环自跟成功,目标快速捕获过程完成,系统进入传统的测控流程。
快捕工作流程图如图2所示。

图2 系统快捕工作流程Fig.2 System fast acquisition workflow
2 高动态快速目标捕获方案设计
2.1 多波束覆盖特性设计
本项目接收阵列天线采用18×18正方形布阵实现。


式中,λ为波长;N为阵元数量;d为阵元间距。
由此方向图公式可以看出,阵列天线波束的半功率点宽度与阵元数(阵列天线孔径)成反比,也就是说,阵元数越少,对应阵列天线孔径越小,波束半功率点宽度越宽。因此改变波束宽度,只需改变参与波束形成的阵元数目,波控分系统根据所需波束宽度计算参与波束形成的阵元,屏蔽不参与波束合成的阵元。屏蔽阵元可通过设置加权值为零实现(或关断场放或设置移相器最大衰减)。当然阵元数的减少可以展宽天线波束宽度,同时也降低了系统G/T值,降低了系统接收灵敏度。
为了不降低系统系统G/T值和接收灵敏度,全部18×18阵元参与波束形成,利用四通道独立可控的射频数控移相器形成4个独立波束,接收半功率波束宽度为1.5°,扫描10°范围可采用7次步进1.5°的天线指向完成。
利用4个电波束同时分空域完成20°×20°空域覆盖。即每个波束通过7×7次点位扫描覆盖10°×10°空域,在每个点位波束驻留数毫秒,此时间内完成信号检测。利用4个波束完成20°×20°空域扫描的示意图如图3所示,完成一次覆盖扫描约500 ms。
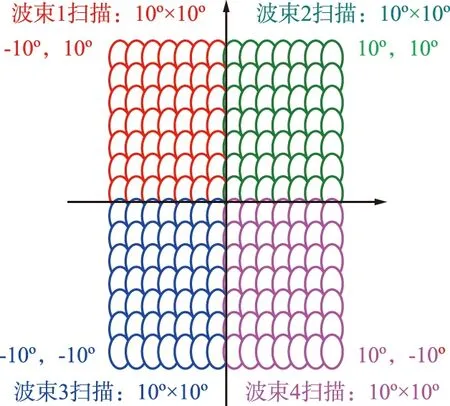
图3 利用4个电波束覆盖20°×20°空域示意Fig.3 Schematic diagram of using four beams to cover 20°×20° airspace
2.2 多通道信号检测
在波束驻留时间内需要完成信号的检测并记录信号的能量值。信号检测采用FFT分析方法[6-8],2路并行FFT分析的原理框图如图4所示。
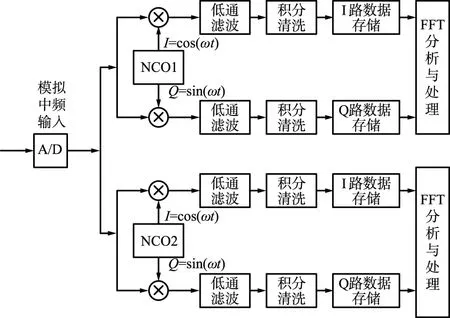
图4 信号FFT检测原理框图Fig.4 Principle block diagram of signal FFT detection
为提高信号捕获概率,需要满足FFT分析后的信噪比大于15 dB,由下式确定FFT分析的分辨率:
式中,ds为FFT分析后的信噪比,这里取15;S/φ为输入信号信噪比,这里取42 dBHz;kn为FFT分辨率。
由计算可得kn=501 Hz,因此FFT分析数据采样时间为2 ms,如果取FFT分析的采样点数为2 048点,那么FFT分析的范围为2 048×501=1 026 048 Hz,即±0.513 MHz。因此分析±1 MHz的范围需要2路并行的FFT分析。
A/D采样钟为56 MHz,采样得到的频率范围为(14±1)MHz。信号处理过程采用多路并行处理方法[9],通过设置本地NCO的频率实现按频率分段处理。
假设接收到的信号为:
式中,ω为中心频率;fd为多普勒频率;k为多普勒一次变化率,二次变化率对捕获影响很小,故暂不考虑。
本地载波信号为:
I=cos(ωt),Q=sin(ωt)。
经过混频后信号为:
经过滤波后,
如果k为0,对其做FFT分析就可以分析出峰值,计算出fd。但是当k不为0时,输入信号有较大的多普勒变化率,就不能直接分析了,需要进行扫频补偿[10]。补偿处理是一个与本地扫频信号混频过程。多普勒补偿原理框图如图5所示。
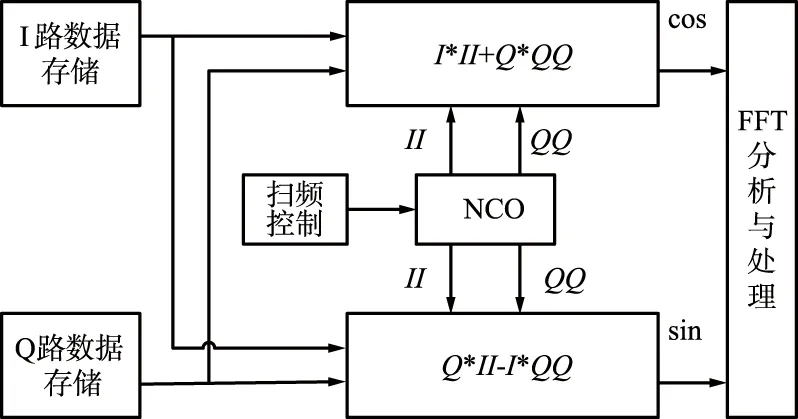
图5 多普勒补偿原理框图Fig.5 Principle block diagram of Doppler compensation
本地NCO输出:
如果扫频NCO的输出随扫存储数据,混频后得到:
cos(fdt),
sin(fdt),
由此可得到多普勒的频率和信号能量值。
2.3 目标捕获模块
4个电波束各自完成10°×10°空域的一次扫描后,得到4个扫描区域内的最强信号对应的空间角度位置,目标捕获模块在这4个信号中找出最强信号判断其信号强度是否达到了设定的检测电平门限[11],该检测门限最小值根据系统接收灵敏度进行换算(或经标校实际测试)得到,也可以根据任务的链路电平的实际情况经核算得到,通过波控计算机界面完成设置。如果信号强度未达到门限,认为未检测到目标,系统则重新进行目标快捕工作模式;如果信号强度达到了门限电平,则将其中一个波束指向这一角度,为确定捕获的信号确实是目标需要再次进行信号电平检测,此次检测的信号强度如果低于门限电平,认为此处不是目标信号,系统则仍然工作在目标快捕模式;如果此次检测的信号电平仍高于门限电平,则认为成功捕获目标,至此完成目标的快速捕获,通过快速跟踪模块实现目标的闭环自动跟踪[12]。
在电波束环路模型下,仿真结果如图6所示。仿真结果表明,即使目标运动角速度达到21°/s时,目标位置与天线指向之间的角度差不超过半个波束覆盖空域(10°)。
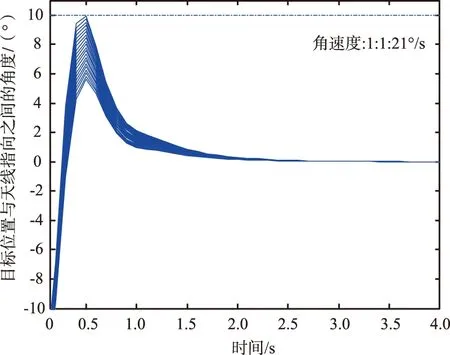
图6 动态目标角捕获性能仿真Fig.6 Simulation of dynamic target angle acquisition performance
2.4 快速跟踪模块
波束控制分系统角跟踪[13]是基于反馈控制理论设计的,多功能数字基带分系统解调得到角误差信号,反映当前天线电波束指向位置与目标位置的偏离。波束控制分系统通过环路计算,控制移相器相移量改变天线波束指向,使天线电波束指向与目标位置指向之间的偏差逐渐减小直到对准目标,从而完成电波束自动跟踪目标[14-15]。由于采用全数字化控制电波束的指向跟踪,所以不存在机械天线的惯性滞后或超调现象故而可以快速完成稳定跟踪目标。
电波束角跟踪采用二型滤波环路,理论上对于匀速运动目标不存在跟踪稳态误差。

递推运算如下:
动态系统模型:
xk+1=Φkxk+Bkuk+wk,
式中,tk时刻的状态矢量为xk;Φk为tk~tk+1的系统转移矩阵;uk为tk时刻的输入量;Bk为系数矩阵;wk是噪声矢量,为零均值的白噪声序列。
观测模型:
Zk+1=Hk+1xk+1+Nk+1,
式中,Zk为观测矢量;Hk为观测矩阵,它反映观测矢量是某些状态变量的线性组合;Nk为测量时的测量噪声矢量序列,是零均值的白噪声序列。
新息方程:
滤波估值方程:
预测估值方程(一级):
最佳权矩阵:
kk+1-P(k+1/k)H′k+1[Hk+1P(k+1/)kH′k+1+R(k+1)]-1。
预测估值协方差:
式中,Q(k)为噪声的协方差。
滤波估值协方差:
[I-Kk+1Hk+1]′+Kk+1R(k+1)K′k+1。
当给定P(0),也就是给定状态矢量起始条件的协方差以后,可以求出预测估值协方差P(1/0)来。进而求出权矩阵K1,并求出P(1)。这样就可以递推算出K(k+1)和P(k+1)。
在相同信噪比情况下,系统跟踪精度主要由差波束性能的差零深、接收链路滤波器、伺服环路带宽决定,对于机械轴天线的跟踪精度还需要考虑齿隙误差,一般采用双电机进行消隙处理。在卫星测控工程应用中,对角跟踪精度指标要求并不高,一般要求优于波束宽度的1/10,经过适当调整环路带宽参数即可满足。
3 快捕模块性能分析
3.1 高动态信号检测特性分析
针对单载波信号的检测性进行了仿真。
① 分析条件
按照C/N0=41 dBHz条件进行捕获分析。
② 高动态单载波的检测性仿真
假设信号检测分析时间为2 ms,等效带宽为500 Hz,等效信噪比为S/N>=23 dB。通过仿真,在S/N=23 dB时,信号检测概率大于99.99%,虚警概率小于10-7。
对多普勒频率±2 MHz的高动态信号进行了仿真,仿真结果如图7所示。

图7 信号检测性分析结果Fig.7 Results of signal detectability analysis
仿真结果表明,C/N0=41 dBHz时,信号检测概率大于99.99%,虚警概率小于10-7。
3.2 电波束环路特性分析
在电波束跟踪环路设计中采用了卡尔曼滤波实现。
卡尔曼滤波仿真结果表明,环路更新频率20 Hz,位置初值设定为5°,速度值和加速度值分别为20°/s和10°/s2。滤波器具有较好的收敛特性和滤波特性,可以较好地跟踪大动态目标。同时由于电波束的指向不存在机械天线的惯性滞后或超调现象故而可以比传统机械轴天线更快速完成稳定跟踪目标。
3.3 系统高动态角捕获性能分析
对于不同动态情况下的角捕获概率进行了仿真,分别得到角捕获概率与目标角速度、波束宽度之间的关系,如图8所示。
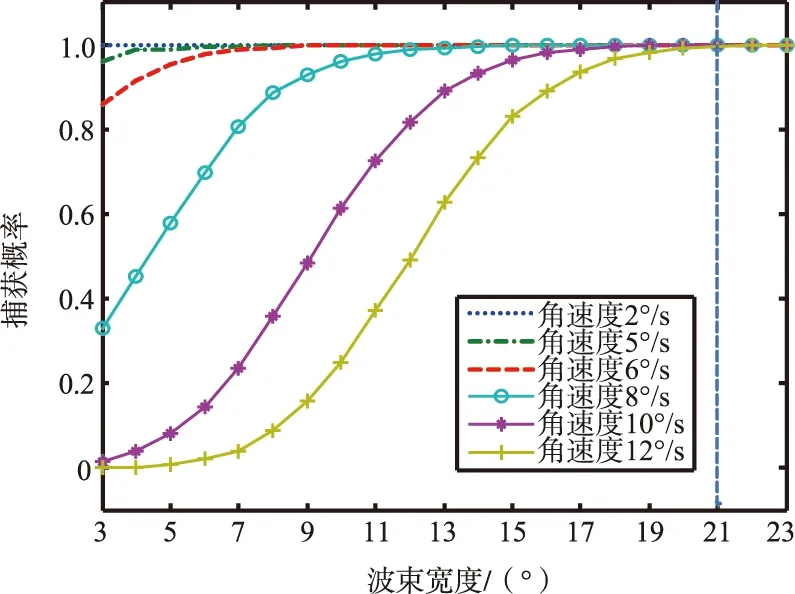
图8 角捕获概率仿真结果Fig.8 Simulation results of angle acquisition probability
仿真结果表明,覆盖波束宽度为24°时,对角速度小于12°/s的目标捕获概率在99.9%以上。对于最大角速度为10°/s的目标,捕获概率在99.99%以上。
3.4 试验情况
该系统于2004年11月1日参加了“嫦娥五号”再入返回试验任务,设备在第一时间捕获并跟踪目标,顺利完成了对返回器再入阶段的测控任务。
2020年12月17日,系统参加了探月三期“嫦娥五号”任务,在前站未能成功捕获目标、引导数据偏差较大的情况下,本设备发挥出了技术优势,及时快速捕获到目标,圆满完成测控任务。
该方案在探月工程2次返回试验中表现出了优异性能,完成了传统天线无法完成的任务。
4 结束语
本文介绍了一种利用多波束实现大动态高速目标快速捕获方案,实现了20°×20°大范围、高速目标的快速捕获,执行了探月工程返回器测控试验任务,表现出优异性能,解决了返回器再入阶段测控技术难题,为“嫦娥五号”顺利返回做出了重要贡献。该方案可应用于高速大动态飞行器的捕获和跟踪,对相关工程实现有一定的参考意义。
