基于时延扩展的主动测高算法
2021-08-11闫晓峰张鈺婷
闫晓峰,张鈺婷,焦 阳,万 群
(1.海军装备部,重庆 405200;2.电子科技大学,四川 成都 611731;3.敏捷智能计算四川省重点实验室,四川 成都 611731)
0 引言
无线电高度计作为飞行平台的必备部件之一,主要为平台的控制系统提供高度信息,是决定飞行安全的重要因素[1-2]。因此,无线电高度计可广泛应用于各飞行场景中,如直升机定高盘旋、飞机起降和海平面高度测量等。随着应用场景的多元化和复杂化,人们对于雷达高度计的性能要求也越来越高,比如其准确性、实时性、稳定性和低截获性等。常见的雷达高度计均采用主动雷达的方式,由飞行平台自身发射信号,到达地面后产生地面回波,由平台自身接收回波信号,并进行分析处理得到平台高度。
根据发射信号的形式,可以将雷达高度计分为3类:调频连续波(FMCW)、准调频连续波(FMICW)和脉冲雷达高度计[3-5]。FMCW高度计的优点有结构简单、发射功率较低、接收机灵敏度较高等,不仅没有距离盲区,还具有较高的距离分辨力。同时,也存在一些固有缺点,比如抗干扰能力差、高空测量难度大且测量精度较低等[6-8]。相对来说,脉冲雷达高度计则具有更高的测高精度,尤其是在高空或超高空上。然而,脉冲雷达高度计峰值功率较高,低截获性较差[9-11]。FMICW高度计是在调频连续波的基础上加波门控制脉冲,在一个时间周期内发射信号,发射机关闭后,接收机开始接收信号,在接收信号的基础上加发射信号互补波门。不仅使收发隔离的问题得到解决,还大大增加了作用距离,降低了平均功率。FMICW高度计兼具FMCW高度计和脉冲雷达高度计的优点,具有绝对的优势[12-15]。
脉冲雷达高度计多采用脉冲前沿跟踪,跟踪点是回波前沿的半功率点,在回波前沿宽度变动的情况下,会造成测高误差[9]。FMICW高度计忽略了多普勒频移的影响,在平台运动速度较大的情况下,测高误差较大。
考虑到波束宽度,回波具有明显的时延扩展。在波束偏角不同时,回波时延扩展信息不同。本文基于主动测高模型,利用时延扩展对波束内侧和外侧的时频信息进行分析,校正波束指向,进而得到准确的高度信息。在波束指向存在偏角时,提高了测高精度。
1 时延扩展测高问题
地面回波信号由反射分量和散射分量构成,反射分量和地面的反射系数有关,散射分量和其散射系数有关,二者都和地面的粗糙程度以及测高雷达的工作频率等相关。其中,回波信号主要取决于散射系数的大小。当信号入射角为0°~40°时,后向散射系数大于0;当入射角大于40°时,后向散射系数为0,即无散射回波。
无线电高度计一般是利用发射部分向地面发射一系列天线波束,通过地面反射形成回波信号,利用回波信号相比于发射信号的延迟即可完成测高。理论上来说,高度h应利用天底点的反射回波时延τ0来计算,即:
(1)
式中,光速c=3×108m/s。当发射波束指向存在一定的偏角时,会导致波束并非垂直照射地面,即波束中心线与地面法线方向不重合。这种情况下并不能直接得到τ0。通过地面回波分析,可以得到最短的回波时延τmin和最长的回波时延τmax,判断波束指向,得到准确的天底点回波时延τ0,进而计算高度h。
在面目标的情况下,地面回波信号可以表示成发射信号关于时延和频移的二重积分,也是存在时延扩展和多普勒频移扩展。本文仅对时延扩展进行研究,因此,将地面分成M个等距离环,有:
(2)
式中,σm为第m个等距离环的散射系数;τm∈[τmin,τmax]为第m个等距离环回波时延,二者均与信号入射角有关。在这里,信号入射角与高度、波束宽度及波束偏角有关。n(t)为零均值,方差为σ2的高斯白噪声。
因此,将时延扩展测高问题转化为时延估计问题,即对回波信号sr(t)进行时域处理,得到最短时延和最长时延,利用二者的关系,判断波束指向,并估计高度。
2 时延扩展测高算法
传统的测高方法是对回波前沿估计,根据其对应的时延测得高度。在波束指向存在偏角的情况,仅由回波前沿测高会带来误差。上一节中,地面回波信号进行了时延估计,可以得到回波的最短时延和最长时延。当波束偏角和半波束宽度的大小关系不同时,最短时延和最长时延的关系也不同。因此,本节将讨论不同波束照射模型下的测高方法。
2.1 波束垂直指向地面
一般来说,当波束中心直接指向天底点时,最短回波时延τmin即和待估计的τ0相等。测量模型如图1所示。

图1 波束垂直发射时的测高模型Fig.1 Altimeter model diagram when the beam is pointed vertically to the ground
图1中,φ=0°为波束偏角,定义为雷达发射波束的中心线与地面法线方向的夹角,θ为半波束宽度,τmin为最短回波时延,τmax为最长回波时延。此时2个回波时延之间满足:
(3)
此时,波束偏角φ=0°,高度可以由最短波时延τmin确定:
(4)
2.2 波束偏角小于半波束角
当波束中心并不直接指向天底点O时,最早到达的波束应为O点的反射回波,最晚到达波束为波束投影面距离天底点最远的散射点Q。定义波束中心线在法线右侧时,波束偏角大于0°,波束中心线在法线左侧时,波束偏角小于0°。模型如图2和图3所示。
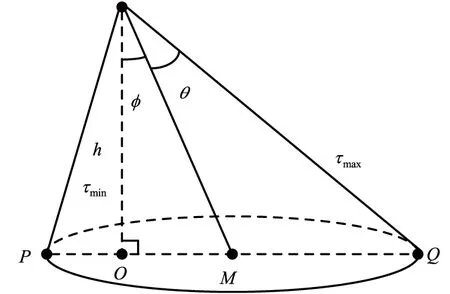
图2 波束偏角0°<φ<θ时的测高模型Fig.2 Altimeter model diagram when 0°<φ<θ

图3 波束偏角-θ<φ<0°时的测高模型Fig.3 Altimeter model diagram when -θ<φ<0°
图2和图3中,θ为半波束宽度,φ为波束中心线偏离地面法线方向的角度。当|φ|<θ时,最短回波时延为τmin,最长回波时延为τmax,此时,时延之间的关系为:
(5)
当θ∈[0,90°),|φ|<θ时,显然(θ+|φ|)∈[0,180°),cos(θ+|φ|)单调递减,因此,cos(θ+|φ|)∈(cos 2θ,cosθ)。此时,波束偏角和高度可以由最短回波时延τmin和最长回波时延τmax确定:
(6)
(7)
Q点的入射角最大,要想让整个地面照射圆的信号都能返回平台,则
θ+φ≤40°,
(8)
此时,波束偏角测量满足式(6)。
2.3 波束偏角大于半波束角
波束以角度φ照射到地面,当|φ|>θ时,最早的回波距离大于真实高度,需要根据实际测出的最短回波时延τmin和波束偏角,来估计雷达高度。模型如图4和图5所示。
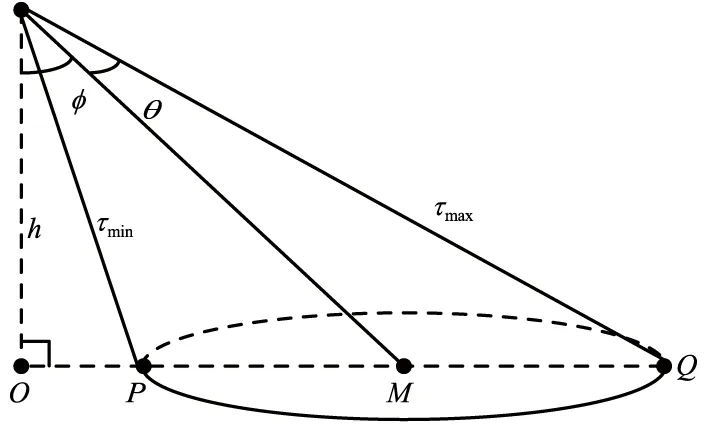
图4 波束偏角φ>θ时的测高模型Fig.4 Altimeter model diagram when φ>θ

图5 波束偏角φ<-θ时的测高模型Fig.5 Altimeter model diagram when φ<-θ
当|φ|>θ时,最早的回波距离也比真实高度要大,且二者之间的夹角为|φ|-θ。最短回波时延为τmin,最长回波时延为τmax,由几何关系有,最短时延和最长时延的比值为:
(9)
当入射角大于40°时,无后向散射回波。也就是说要收到回波,且|φ|∈(θ,90°),波束偏角应满足:
(10)
由式(9)还可以推得|φ|的计算式:
(11)
此时,高度和最短回波时延之间的关系为:
(12)
因此,在波束指向不同时,可以根据最短回波时延和最长回波时延来确定波束偏角,并准确测量高度。
3 仿真实验
假设发射机发射脉冲信号,脉内为线性调频信号,脉宽为T=5 μs,调频带宽为B=30 MHz,采样率为fs=60 MHz。在飞行平台与天底点的高度为H=9 km,发射信号半波束宽度角为θ=30°的情况下,分别对波束偏角φ为0°,15°,45°情况进行仿真实验。
考虑森林地形,入射角为0°~40°的情况下,散射系数为0.9~0.3。仅考虑高斯白噪声的干扰时,半波束角θ=30°,波束垂直指向地面的情况下,通过回波分析来估计最短时延和最长时延。
在本节采用一种基于乘积指数滤波器的方法来估计时延。将回波信号输入乘积指数滤波器,对其输出响应的幅值进行极大值搜索,即可得到多个等距离环对应的时延估计值。回波信噪比SNR=0 dB时,利用乘积指数滤波估计时延的示意图如图6所示。
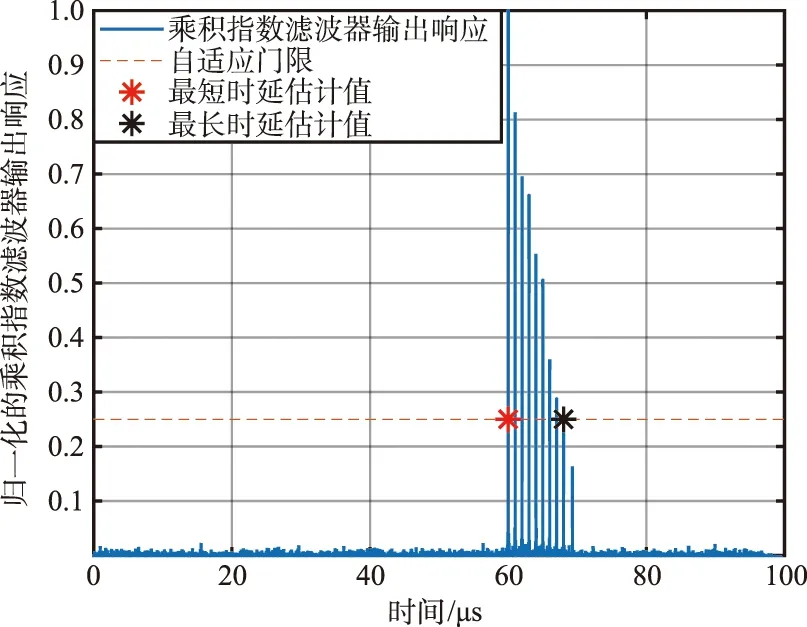
图6 SNR=0 dB时,时延估计示意Fig.6 Schematic diagram of time delay estimation when SNR=0 dB
由图6可以看出,每一个等距离环都对应一个输出响应的峰值,合理设置自适应门限,即可得到每一个等距离环对应的时延。
信噪比变化时,最短时延和最长时延估计的均方根误差图如图7所示。
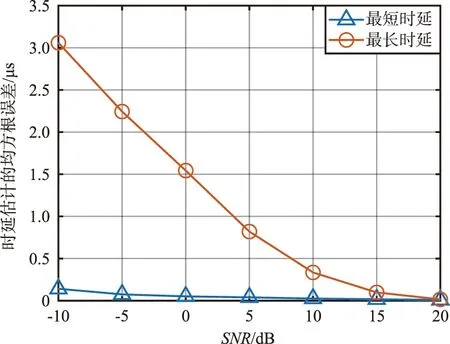
图7 信噪比变化时,时延估计均方根误差图Fig.7 RMSE of time delay estimation when SNR changes
由图7可以看出,最短时延估计误差较小,最长时延估计误差较大,这是因为最短回波时延对应的回波功率较强,而最长回波时延对应的回波功率较弱,容易被噪声掩盖。信噪比不断增加时,2个时延估计的均方根误差均减小,当SNR=20 dB时,最短回波时延估计均方根误差为10 ns,最长回波时延估计均方根误差为16 ns。
波束偏角φ为0°,15°,45°时,波束偏角估计均方根误差图如图8所示。
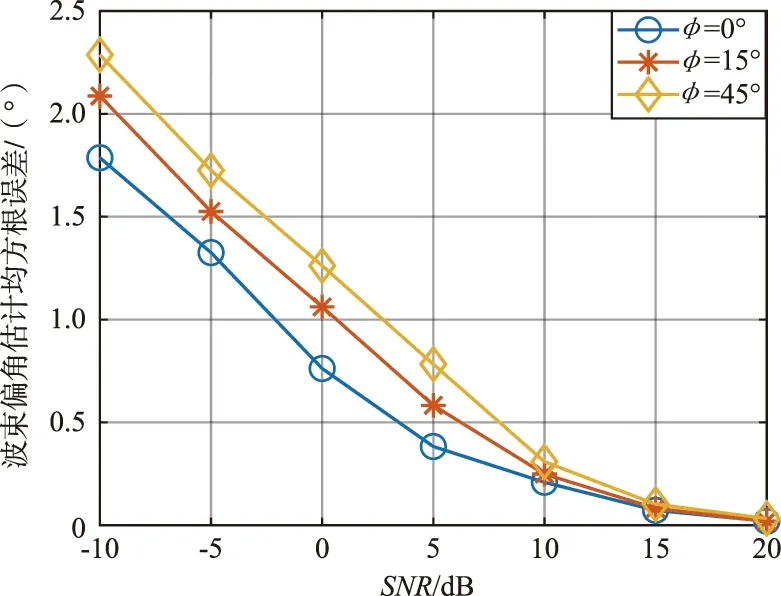
图8 波束偏角φ为0°,15°,45°时,偏角估计均方根误差图Fig.8 RMSE of beam deviation angle estimation when φ=0°,15°,45°
由图8可以看出,随着信噪比增加,波束偏角估计误差减小。波束偏角越大,偏角估计误差越大,这是由于波束偏角越大,回波功率越小,时延估计误差越大。
波束偏角φ为0°,15°,45°时,高度估计相对误差图如图9所示。
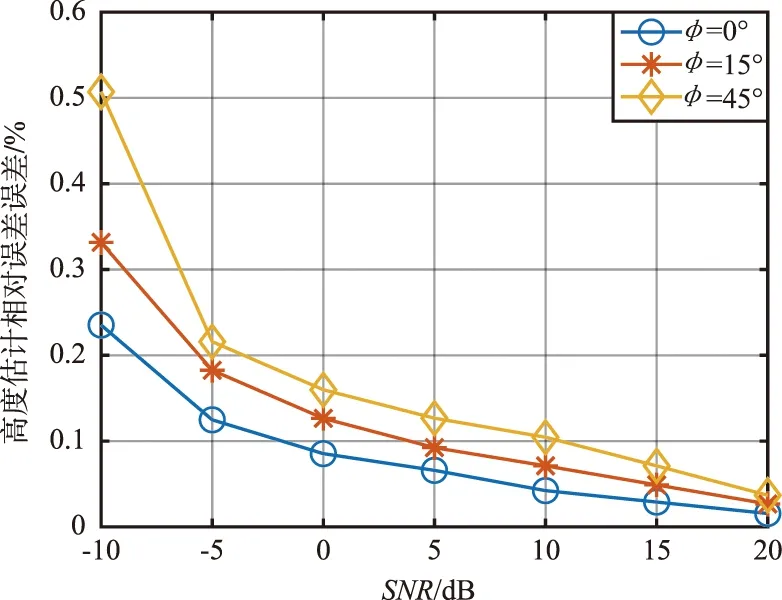
图9 波束偏角φ为0°,15°,45°时,高度估计相对误差图Fig.9 Relative error of height estimation when φ=0°,15°,45°
由图9可以看出,高度估计误差受时延估计误差的影响,波束偏角增大,测高误差增大。
4 结束语
考虑波束指向存在偏角的情况,通过对大地回波信号的分析,将地面目标进行离散化。借助这一模型,提出了一种时延扩展的测高方法。传统的测回波前沿的方法不仅存在波束偏角的问题,还存在回波前沿很难判定的问题,使得测高的精度急剧下降。时延扩展的测高方法不仅可以准确判断波束指向,还可以校正波束偏角带来的测高误差,具有较高的精确性和鲁棒性。首先在波束存在偏角的情况下,分别针对波束偏角为0°、小于半波束角、大于半波束角的情况,得到了波束偏角估计和高度估计的结果。通过仿真验证,证明了该方法的可行性和有效性。
