HOG与SVM在动态称重轮轴识别中的应用研究
2021-08-10李小勇韦泽贤杨玉琳
李小勇,韦泽贤,杨玉琳
(广西交科集团有限公司, 广西 南宁 530007)
0 引言
由于车辆超限超载现象的普遍存在,对社会、经济、环境及道路安全都造成严重影响。动态称重技术(Weigh-in-Motion,WIM)在1991年前后[1]被引入我国,作为遏制超限超载的一种手段, 货运车辆经过收费站时, 要对其进行计重收费。因此, 大量研究人员在动态称重技术领域进行了许多研究。徐刚等[2]对高速公路称重系统站场布置进行了研究分析,提出了在服务区、高速入口、出口分别设置静态称重系统。为了有效地获取超载超限条件下公路运输车辆的实际轴载信息,文献[3]研究了场称重的轴载调查及数据分析方法,阐述了车辆轮轴类型分类、车辆轴载称重调查、按轮轴类型划分的交通量调查、调查数据分析与轴载谱分析的内容、方法和注意事项。整车式称重系统精度高,但不能实现连续过车;轴重式称重系统能够实现连续过车,但精度较低。针对这些问题,杨德等[4]将2种方式的特点有机结合,提出一种新的整车式不停车称重系统方案,取得了良好效果。王磊等[5]提出了集高精度动态称重、监控、收费为一体的EWTC系统整体方案,并成功实施。与此同时,对EWTC方案进行进一步改进与研究,采用新型的 EWTC 系统后收费站点通行能力明显提高[6],车道通行能力较未使用和使用其他类型动态称重系统提高5到10倍。文献[7]研究了交错式、条带式、宽板式压电石英传感器组合方案及其效果,提出了多条带、宽板交错布设方案,很好地解决了车辆走S型、倒车、骤停等情况。文献[8]提出了一种光纤高速汽车动态称重系统,可用于对桥上自由运行车辆轮轴重、总重、车辆速度和轮轴间距等参数的采集,为公路桥梁车辆荷载研究提供必要手段。以上提到的方法、装置、设备等为动态称重领域提供了多样化参考,丰富了动态称重技术的内容,但是,这些方法大都是采用压电与感应式的轮轴识别方式,并未采用机器视觉技术。
自2020年1月1日我国高速公路实施入口超载治理以来,全国各省市高速公路运营公司对计重设备、车型识别系统等准确性要求更加提高。采用机器视觉的动态称重系统可进一步增加传感精度,提高识别速度,增进整个系统的自动化、智能化程度,并对事后稽查等有良好的帮助作用。基于机器视觉的车轮检测技术其中的关键技术,可获取车辆轮数、轴数、轴距等重要参数, 从而确定车辆类型和准载范围,为车型识别与动态称重系统提供判定依据。因此,许多学者在此方面进行了详细的研究。
在车轮特征提取方面,大部分文献通过将车轮视为标准圆,进而采用基于Hough变换[9]的圆形检测算法来实现车轮检测。例如,王红亮等[10]利用改进Hough变换算法对预处理后的车辆图像进行车轮检测,宓为建等[11]提出了结合激光雷达和Hough变换算法进行车轮检测。但实际上,车辆在行驶过程中,受胎压、路面挤压等不可控因素影响,车轮将会变成非标准圆形,而Hough圆变换特征更适合检测标准圆形。因此,若仅仅采用Hough圆变换特征,会使得系统的实用性降低,在极端情况下,甚至将会大大降低车轮检测正确率。针对上述方法存在精度易受环境影响、鲁棒性低的问题,本研究通过文献[12]与对车轮特征的分析,发现车轮具有比较明显的轮廓特征,而方向梯度直方图(Histogram of Gradient, HOG)[13]可以很好地去描述车轮轮廓特征,具有对光照、方向、尺度不敏感等优点[14]。
除了车轮特征以外,识别算法也是车轮检测的重要一环。其中,张瑞等[15]采用基于神经网络的自适应滤波变步长LMS算法,开发了一套基于神经网络自适应滤波的车辆超载动态监测系统。陈超波等[16]采用RBF神经网络作为识别核心,对动态称重数据处理,验证了径向基神经网络对称重数据处理表现出良好的精度与速度。支持向量机(Support Vector Machine, SVM)是一类监督学习方法[17],于1964年被提出,在20世纪90年代后得到快速发展,至今已衍生出一系列改进和扩展算法,在人像识别、文本分类等模式识别问题中得到应用,与其他传统的学习方法(如神经网络等)相比,具有结构简单、推广性能好、学习速度快等优点[18]。另外,通过修正核函数,可以得到各种不同的分类曲面。
本研究提出一种基于HOG特征与SVM识别的车轮检测方法,用于动态称重系统的轮轴识别。该方法设计思路为:首先通过高清相机获得原始图像信号;其次采用HOG特征描述方法,提取车辆图像的车轮廓特征向量;最后,采用SVM方法对所提取的特征向量训练出车轮检测分类器,最终获得可对车辆轮轴高效检测的识别模型。
1 HOG特征提取

图1 HOG特征特提取流程图Fig.1 Flowchart of HOG feature extraction
(1)颜色空间归一化。采用Gamma校正法[20]对图片颜色空间归一化,目的是为了调节图像对比度,降低图像局部阴影与光照变化所造成的影响,同时,归一化操作还可抑制噪音干扰。
(2)方向与强度分布梯度计算。计算每个像素的梯度(方向分布与强度分布),从而进一步获取图像轮廓信息。假设像素点(x,y)的水平方向梯度为gx,垂直方向梯度为gy,像素值为I(x,y),3者关系可表示为:
(1)
像素点(x,y)的梯度幅值g(x,y)和梯度方向θ的关系为:
(2)
(3)构建梯度方向直方图。将图像分成若干个单元细胞,通常情况下,采用9bin(即9个维度的特征向量,用图2中的z1~z9表示)作为直方图的x轴,角度范围对应的梯度累加值作为直方图y轴,如图2所示。

图2 梯度方向图Fig.2 Gradient pattern
(4)重叠块直方图归一化。从梯度计算公式中不难看出,梯度强度对局部光照及前景背景对比度非常敏感,要减少这种影响,必须要对梯度强度做归一化。归一化方法多种多样,但整体思想基本上是一致的:将几个细胞单元组合成更大的块。这时整幅图像就可看成是待检测窗口,将更大的块看成是滑动窗口,依次从左到右、从上到下进行滑动,得到一些有重复细胞单元的块及一些相同细胞单元在不同块(block)中的梯度信息,再对这些block信息分别作归一化处理,如图3所示。

图3 细胞单元与块Fig.3 Cells and block
(5)整合重叠块,并形成最终HOG特征向量。
2 SVM分类器原理简介
SVM学习的基本想法是求解能够正确划分训练数据集并且几何间隔最大的分离超平面。如图4所示,即为分离超平面,对于线性可分的数据集来说,这样的超平面有无穷多个(即感知机),但是几何间隔最大的分离超平面却是唯一的。
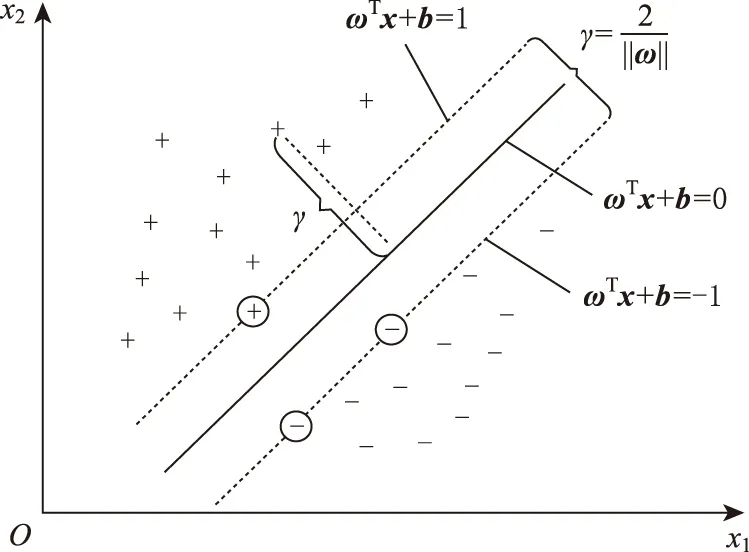
图4 支持向量与最大间隔Fig.4 Support vector and maximum interval
与其他传统的学习方法(如神经网络等)相比,SVM结构简一单、推广性能好、学习速度快,此外,通过修正核函数,还可得到各种不同的分类曲面。假设有训练样本集表示为:D={(x1,y1),(x2,y2),…,(xm,ym)},yi∈{-1,+1},其中-1表示负类,+1表示正类,则最优分隔超平面可定义为:
他出院时,父亲不敢给他钱,却给他买了一大包德芙巧克力,说:“你小时候就爱吃巧克力,那时候家里没钱,都买些最便宜的。”后来的一天,他接到继母的电话,说父亲中风了。他一直以为自己恨不得父亲死,可看到父亲的一瞬,他知道自己真的错了。父亲昏迷不醒,几天几夜,他都守在父亲的床边,父亲的命终于保住了,却一直痴傻着,手脚也不会动,就会傻乐。
ωTx+b>0,
(3)
式中,x为训练样本向量;ω为法向量;b为位移项向量。训练样本向量x与分隔超平面之间的距离r可表示为:
(4)
假设超平面能将样本正确分类,则对于yi,若yi=+1,则ωTx+b>0;若yi=-1,则ωTx+b<0。令:
(5)
则支持向量获得的超平面间隔如图4所示,距离超平面最近的几个训练样本点使得式(5)中的等号成立,即ωTx+b=1,ωTx+b=-1。故距离超平面最近的几个训练样本点称为支持向量,2个异类支持向量到超平面的距离之和为:
(6)
式(6)中γ值为2个异类支持向量到超平面距离之和,支持向量机的原理就是寻找几何间隔最大的分离超平面。图4中,坐标x1与x2表示高维样本在低维度展开的一个超平面,r为训练样本x与超平面间的距离(式(4)),2个异类支持向量到超平面的距离之和为γ。因此,为了满足式(5)中的约束的参数,并使式(6)中的γ值最大,则可找到具有最大间隔的划分超平面,即:
(7)
s.t.yi(ωTx+b)≥1,i=1, 2,…,m。
(8)
由式(7)和式(8)可知,想要得到最大间隔,只需最大化‖ω‖-1,等价于最小化‖ω‖2,则可将原优化函数(式(7)与式 (8))表示为:
(9)
s.t.yi(ωTx+b)≥1,i=1, 2,…,m。
(10)
式(9)和式(10)为凸二次规划问题,此类问题可以使用拉格朗日乘子法将其转为对偶问题得:
(11)
(12)
式中αi和αj统称对偶变量或拉格朗日乘子。直观上,总存在1个拉格朗日乘子,使得没有限制的拉格朗日算子相对于x的最小值,等于原凸二次规划问题的最优值。最后可得到最优分类函数:
(13)
3 试验分析与实际测试
3.1 试验训练数据集
在此次试验中,车轮数据集来自网络收集,覆盖了绝大多数车型的车轮。样本分别为正样本(对分类起正面作用的,对结果有利的样本)与负样本(对分类起负面作用的,对结果有害的样本)。其中正样本为216张,负样本(不带有车轮的图片)300张。本研究在训练时会将所有正负样本都归一化尺寸为96×96像素大小的图片。
3.2 HOG特征初始与化参数配置
将检测窗口尺寸设置为96×96像素,细胞单元(cell)尺寸为8×8像素,块(block)尺寸为16×16像素,块滑动步长为8×8。每个细胞单元的梯度方向量化数量设置为9(即直方图中bin的数量),这样就相当于每个细胞单元具有9维特征向量。那么,1副96×96像素样本图像中块的个数为[(96-16)/8+1][(96-16)/8+1]=11×11=121个,每个块的细胞单元个数为(16/8)×(16/8)=4个,1个细胞单元对应9维特征向量,故1副96×96像素样本图像的HOG特征向量维度为121×4×9=4 356 维。
3.3 SVM参数选择及训练
本研究使用OpenCV内置的SVM工具库,选用C-SVM类型的SVM,核函数为线性核。若令惩罚因子C为无穷大,则SVM退化为硬间隔分类器,此时使用线性核只能处理线性可分样本(因为对于线性不可分样本,无法找到1个超平面可以正确划分所有样本,于是模型参数不存在可行解)。当C趋于0时,不再关注分类是否正确,只要求间隔越大越好,那么将无法得到有意义的解且算法不会收敛。C的变化如图5所示。

图5 不同的C值对分类性能的影响Fig.5 Influence of different C values on classification performance
通过多次测试与验证试验,最终设置惩罚因子C=0.01。首先,按照第1小节方式,提取正负样本的HOG特征。其次,分别对正负样本打标签,正样本标记为1,负样本标记为0。第三,把正负样本的HOG特征及样本标签输入SVM中进行训练。值得说明的是,本研究采用的是梯度下降法进行模型训练,终止条件设置为经过1 000次迭代,或者分类误差小于0.01时,SVM的训练停止。经过训练迭代并满足停止条件后,可获得用于车轮检测的SVM分类器。
3.4 试验效果与分析
本研究的试验编译环境为Visual Studio 2013,采用OpenCV版本为2.4.9。在上一步骤获得SVM分类器后,对测试图像采用多尺度滑动窗口的方式进行车轮检测。本研究提出的车轮检测方法可以实现对多种车型车轮检测,且具有精准的车轮检测效果。试验表明,本研究算法在复杂情况下,仍可有效应对车轮图像的局部阴影、光照、角度及尺度变化所带来的影响,具有鲁棒性强、准确性高的特点。为了进一步验证本研究算法的有效性,将Hough特征与HOG特征进行优劣性对比,在城市道路采集了车辆图片进行车轮检测试验,城市道路部分车辆车轮识别效果如图6所示。精确统计结果见表1。可以看到,采用Hough特征变换得到的识别结果,正确率仅有80%左右,运用本研究所提的HOG与SVM结合的方法,准确率均在96%以上,满足实际检测需求,具有较好的应用价值。

图6 城市道路车轮识别效果Fig.6 Wheel recognition effect on urban roads
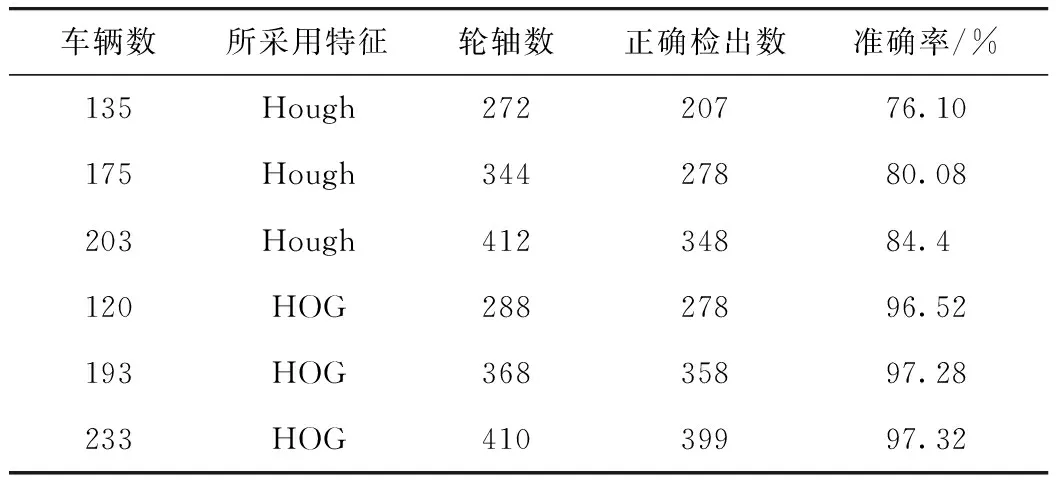
表1 本次试验检测结果Tab.1 Test result of this experiment
3.5 实测效果与分析
为了进一步检验所提出方法的实用性,将本研究所提的模型部署在高速公路收费站入口的超载治理车道上,并与该车道原本使用的压电式轮轴识别器进行对比。本次实测采用的是海康威视相机,型号DS-2CD3T,具有180° 的水平视场角,每秒可获得25张2 560×1 440像素的图片,详细的数据对比列在表2中。本研究提出方法很好地检测出了2轴、3轴、4轴的车辆。但在实际中,某些超长货车(超出本次试验所采用的广角镜头范围)无法检测出正确轮轴数目。而从表2的统计结果也可以看到,本研究方法的车辆轮轴识别率较原方式提高了5%左右。

表2 实测结果统计Tab.2 Statistics of actual test result
4 结论
面对日益增加的识别速度、精度等需求,本研究提出了一种采用机器视觉技术的车辆轮轴识别方法,用于动态称重系统。本研究方法创新性地采用HOG变换特征代替Hough特征,在复杂情况下,仍可有效应对车轮图像的局部阴影、光照、角度及尺度变化所带来的影响。其次,采用SVM作为车轮的识别算法,具有结构简单、模型小巧,推广性能好、学习速度快等优点,适合大规模快速部署。市政道路试验与高速公路入口超载车道的实测结果均表明,本研究提出的HOG与SVM结合的方法,可进一步增加传感精度,提高识别速度,增进整个系统的自动化、智能化程度,并具有良好的实用价值。但本研究在利用SVM时,仅采用了1种核函数(线性核函数),在以后的研究中,可进一步探究不同核函数对检测结果的影响。
