基于Sentinel--1A雷达数据和Sentinel--2A多光谱数据特征融合的地物分类
2021-08-10郑煜陈圣波陈彦冰李安臻
郑煜,陈圣波,陈彦冰,李安臻
吉林大学 地球探测科学与技术学院,长春 130026
0 引言
地物分类一般被视为遥感目标解译的初始阶段和关键环节。光学遥感影像具有分辨率高、覆盖范围广和成本低等优点[1--2],传统利用遥感影像进行地物分类多基于光学影像[3--4]。但在实际运用中,光学影像易受多云、多雨和多雾等不良天气的影响,不可避免地在地物分类中造成数据信息的缺失,增加分类难度。合成孔径雷达(Synthetic Aperture Radar, SAR)影像具有全天时、全天候、高分辨率和多极化方式等特点[5--8],弥补了光学影像易受不良天气影响的弊端,两种数据具有互补性,在土地利用、地形测绘、农作物分类、洪涝灾害监测、森林和湿地监测以及城市监测等实际应用中具有重要意义[9--14]。
目前,在结合SAR与光学影像进行地物分类的研究中,更侧重于通过不同的数据融合算法和多时相数据达到提高地物分类精度的目的[15--19]。Pei et al.[15]提出了一种基于全极化SAR影像、极化相干矩阵特征、光学遥感影像光谱和纹理的多种特征融合和多分类器集成的遥感影像分类新方法,利用主被动遥感数据在不同地表景观类型提取上的潜力,有效地提取土地覆盖信息。Liu et al.[16]针对不同融合算法差异,对主成分分析(PCA)、Gram--Schmidt(GS)、Brovey和小波变换4种融合算法进行比较,基于面向对象技术对旱地作物进行分类,结果表明融合后分类精度均有所提高,其中,GS和Brovey融合优于另外2种融合算法。张海龙等[17]利用改进的Synthetic Variable Ratio(SVR)算法融合Radarsat SAR与Landsat TM影像,采用BP神经网络模型进行监督分类,提高地物分类精度。王宇航等[18]基于Gram--Schmidt(GS)融合算法,对Quickbird影像和Radarsat--2全极化SAR影像进行融合,识别地表覆盖及森林类型,提高了总体分类精度。Blaes et al.[19]将光学影像和3~5幅SAR影像进行组合,用于作物识别,成功提高了作物分类精度。Steinhausen et al.[20]通过1幅Sentinel--2影像和8幅Sentinel--1影像进行组合,改善了多云季风地区的土地利用和土地覆盖分类精度。
然而,直接通过不同的融合算法和采用不同时相影像进行融合分类时,数据量较大,易产生数据冗余。笔者以Sentinel--1A雷达数据和Sentinel--2A多光谱数据作为数据源,通过分析提取有效特征信息,进行特征融合,以长春市净月开发区部分地块为研究区,分别对无云和有云覆盖条件下的地物进行分类,以探究雷达和光学影像特征融合对于地物分类的优势。
1 研究区域与数据预处理
研究区位于吉林省长春市净月开发区,经纬度范围为43°48′~43°50′N,125°27′~125°30′E,研究区面积为10 km2。该区域包括有林地、耕地、水域和建筑区等多种地物类型,且各种地物所占比例相当。
选取2019年7月24日的Sentinel--1A(简称S1)SAR数据和2019年7月28日的Sentinel--2A(简称S2)多光谱数据(无云)进行特征融合分类分析;选取2019年9月22日的S1 SAR数据和2019年9月26日的S2多光谱数据(有云)分析受不良天气影响时,特征融合的分类优势。
S1卫星是哥白尼全球监测计划的第一颗环境卫星,于2014年4月3日发射。本文采用IW GRD地距多视影像,宽幅为250 km,地面分辨率为5 m×20 m。利用欧空局的ESA_SNAP软件对S1数据进行辐射定标、多视、滤波和地形校正等预处理,并重采样为分辨率10 m×10 m的影像,采用投影参数为 UTM (zone50)/WGS84。
S2卫星是“全球环境与安全监测”计划的第2颗卫星,于2015年6月23日发射。本文选取S2影像的蓝、绿、红、近红外波段数据,利用欧空局的Sen2cor插件对S2影像进行辐射定标和大气校正等预处理,采用投影参数为 UTM (zone50)/WGS84。
基于同时期Google Earth高分辨率影像,并结合实地考察,选取20个具有明显标志的建筑物拐点、道路交叉口和河流拐点等作为地面控制点,并确保在图幅中均匀分布。在S1和S2数据预处理的基础上,利用地面控制点进行精确配准处理,配准误差控制在0.5个像元内。裁剪出研究区域范围,裁剪后的研究区S1和S2数据如图1所示。

a.7月24日S1数据;b.7月28日S2数据;c.9月22日S1数据;d.9月26日S2数据。图1 研究区S1和S2数据Fig.1 S1 and S2 data of study area
2 研究方法
基于S2多光谱数据,提取有效光谱特征信息,融合S1 SAR数据纹理特征信息,分别采用3种分类方法对融合前后影像进行地物分类,并评价分类精度。
2.1 特征提取与图像融合
采用主成分分析法(Principal Component Analysis,PCA),对S2数据进行光谱特征提取,结果显示前2个波段集中了原始影像98%以上的信息,完全可以代表原始影像的光谱信息(图2a),因此选取前2个波段作为S2影像的光谱特征数据。基于灰度共生矩阵(GLCM)算法提取S1影像的纹理特征信息(图2b)。
对S2光谱特征信息和S1纹理特征信息基于Gram--Schmidt(GS)进行特征层的图像融合(图2c)。GS融合方法可以对参与融合的各波段进行最佳匹配,不受波段限制,较好地保留空间纹理特征信息和光谱特征信息。

a.S1数据纹理特征提取;b.S2数据光谱特征提取;c.S1和S2数据特征融合。图2 S1和S2数据特征提取和特征融合Fig.2 S1 and S2 data characteristics extraction and fusion
2.2 分类方法与精度评价
基于最小距离(Minimum Distance,MD)、最大似然(Maximum Likelihood,ML)、支持向量机(Support Vector Machine,SVM)3种分类方法分别对单一的S2(无云)影像和基于S2(无云)与同时期S1特征融合后影像进行地物分类,并采用混淆矩阵算法计算融合前后3种分类方法的总体分类精度和Kappa系数,评价最优算法,并采用最优分类方法,对单一的S2(有云)影像和基于S2(有云)与同时期S1特征融合后影像进行地物分类,探究在光学影像受不良天气影响时,融合SAR影像对地物分类的识别能力。整体技术路线如图3所示。

图3 研究方法技术路线Fig.3 Research methods and technical flowchart
3 结果与分析
3.1 无云影像分类结果与精度评价
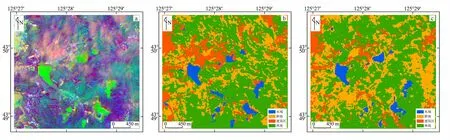
根据研究区土地利用特点,将研究区分为4个类别,分别为水域、林地、耕地和建筑区。以同时期Google Earth高分辨率影像为参考进行样本的选择,在S2(无云)数据中计算Jeffreys--Matusita距离和感兴趣区域每个组合的Transformed Divergence。这两个参数的大小决定了训练样本选择的合理性,确保各个地物之间的可分离性均>1.9。利用3种不同分类方法(MD、ML、SVM)分别对单一的S2(无云)影像和融合后影像进行分类,检验融合前后影像识别地物的能力,找出最优的分类方法。分类结果如图4、5所示,可以看出,3种分类方法中,特征融合后影像的分类效果较融合前均有明显改善。
通过混淆矩阵算法,计算融合前后影像分类的总体分类精度和Kappa系数(表1)。从表1中可以看出,采用MD、ML、SVM 3种分类方法分别对融合前后影像进行分类时,SVM分类方法精度最高,融合前后分类精度分别为89.83%和97.94%;ML分类方法精度次之,融合前后分类精度分别为89.74%和97.59%;MD分类方法精度较差,融合前后分类精度分别为81.98%和88.91%。
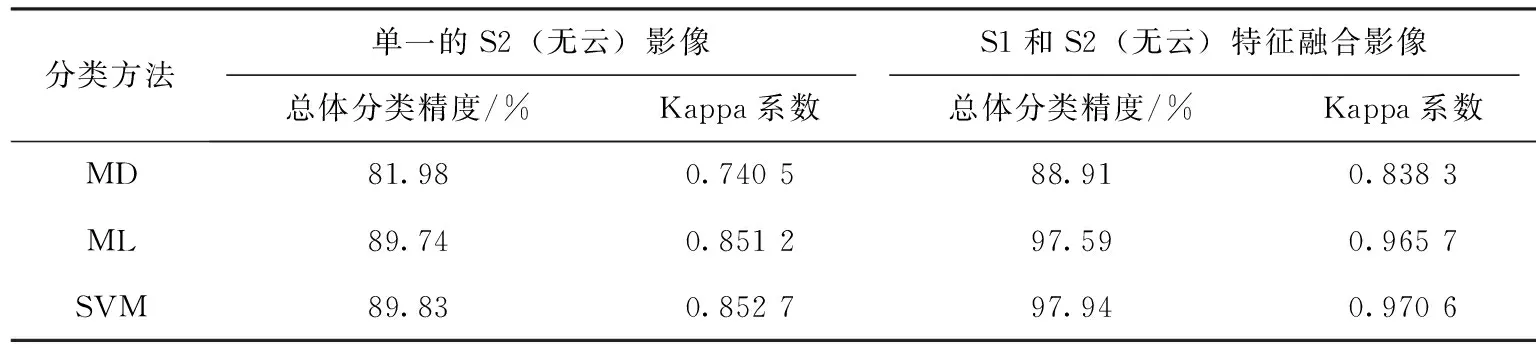
表1 实验数据特征融合前后精度比较
比较融合前后的分类精度,3种分类方法中,S1和S2(无云)特征融合后影像的总体分类精度和kappa系数均高于单一的S2影像,其中,SVM分类精度较融合前提高了8.11%;ML分类精度较融合前提高了7.85%;MD分类精度较融合前提高了6.93%。
由此可知,融合雷达影像和光学影像进行地物分类时有较大优势,且选择合适的分类方法对获得高精度的分类结果具有重要意义,本文SVM分类方法在分别对融合前后影像进行分类和融合后分类精度提高程度上均优于另外2种分类方法。
3.2 有云影像分类结果与精度评价
根据以上分类方法和步骤,使用S2(有云)影像结合同时期的S1影像,采用分类精度最优的SVM分类方法对地物进行分类,探究在光学影像质量较差时,融合SAR影像能否提高分类精度。如图6所示,分别为使用单一S2(有云)影像对研究区进行分类结果和辅助S1影像进行特征融合后的分类结果,表2为融合前后分类精度。由表2可知,融合后总体分类精度提高了12.5%,Kappa系数提高0.171 1,较融合前有明显提高,其中,建筑区和水域的分类精度提高较大,建筑区识别精度提高了20.04%,水域识别精度更是达到了100%。由此可见,在S2影像受不良天气影响时,如有云层覆盖情况下,辅助S1影像进行特征融合后分类精度有明显提高,尤其对建筑区和水域的识别。

a.MD分类结果;b. ML分类结果;c. SVM分类结果。图4 基于S2(无云)影像的分类结果Fig.4 Classification results based on S2 (cloudless) images

a.MD分类结果;b. ML分类结果;c. SVM分类结果。图5 基于S1和S2(无云)影像特征融合的分类结果Fig.5 Classification results based on S1 and S2 (cloudless) image characteristics fusion
a.S1和S2有云融合影像;b.S2(有云)影像分类结果;c. S1和S2(有云)融合影像分类结果。图6 特征融合影像和特征融合前后SVM分类结果Fig.6 Characteristics fusion image and SVM classification results before and after characteristics fusion

表2 验证数据特征融合前后精度比较
4 结论
(1)采用3种不同分类方法(MD、ML、SVM)对地物进行分类时,SVM分类方法分类精度最高,ML分类方法次之,MD分类方法精度最低。
(2)基于S1雷达数据和S2多光谱数据进行特征融合后的影像,采用以上3种分类方法进行地物分类的分类精度,较单一的S2多光谱影像均有明显提高。
(3)在光学影像受不良天气影响时,如有云的情况下,融合雷达影像,对分类精度有较大提高,尤其是在建筑区和水域的分类中有较大优势。
