双吊联动吊装超长重大件货方案设计
2021-08-09付玉平王洪贵于洋
付玉平 王洪贵 于洋

摘要:为降低双吊联动吊装超长重大件货的作业风险,根据吊装作业时船舶稳性变化,将整个吊装方案分为货物转动路径规划和船舶稳性调节两个阶段进行设计。采用调拨左右舷压载水的方法调节船舶稳性,通过确定货物的无碰撞转动路径和各步骤所需调拨压载水量设计最终的吊装方案。以实船数据验证了该吊装方案设计方法的可行性。
关键词:
双吊联动; 超长重大件货; 转动路径规划; 稳性调节; 吊装方案
中图分类号: U661.2;U695.2+6
文献标志码: A
Design on dual-crane tandem lifting plan for over-long and heavy cargo
FU Yuping, WANG Honggui, YU Yang
(Navigation College, Dalian Maritime University, Dalian 116026, Liaoning, China)
Abstract:
To reduce the risk of dual-crane tandem lifting operation for over-long and heavy cargo,
according to the change of ship stability during the lifting operation process, the whole lifting plan design is divided into two stages, the cargo rotation path planning stage and the ship stability regulation stage. The ship stability is adjusted by transferring the ballast water between portside and starboard. The final lifting plan is designed by determining the non-collision rotation path of the cargo and the amount of transferred ballast water at each step. The feasibility of the lifting plan design method is verified by real ship data.
Key words:
dual-crane tandem; over-long and heavy cargo; rotation path planning; stability regulation; lifting plan
收稿日期: 2020-08-05
修回日期: 2020-11-09
基金項目: 国家自然科学基金(51379026)
作者简介:
付玉平(1995—),男,黑龙江绥化人,硕士研究生,研究方向为船舶重大件运输,(E-mail)fyp_gaston@163.com;
王洪贵(1980—),男,吉林九台人,副教授,博士研究生,研究方向为船舶运输保障技术,(E-mail)wanghonggui@dlmu.edu.cn
0 引 言
双吊联动操作主要用于吊装长度和质量超过单吊作业能力的货物,常见于重吊船和多用途船。该项操作的复杂程度和危险概率较之单吊的高,尤其是当货物质量较大且长度超过双吊纵向轴心间距时,既要考虑货物在移动过程中是否与船体和吊机间留有一定的安全距离,还需注意在货物吊起和横移过程中所引起的船舶稳性和横倾变化是否可控[1-2]。目前,国外对双吊联动吊装超长重大件货的研究比较成熟,很多公司都有相对完善的操作规范,正常海况下基本可以实现无风险吊装[3];但国内的此类研究与之相比还有一定差距,很多影响因素都被假定处于理想状态或被直接忽略。王玉闯等[4]论述了吊装货物过程中船舶的初稳心高度变化与吊臂仰角的关系,推导出了吊装过程中计算横倾角的公式,并提出利用打排压载水来调节横倾的方法;王洪贵等[5]根据双吊联动装卸过程中船舶稳性和浮态的变化,采用调拨
左右边平衡水舱压载水的方法调节船舶稳性,将吊装过程分成吊起过程和横移过程来为实船设计吊装方案;柳杨[6]采用在右舷设置浮箱的方法调节双吊协同作业过程中船舶的横倾,并给出浮箱尺度与调节效果的关系。上述文献所研究的双吊联动作业均以双吊同仰角且同步等角转动为前提,假定货物尺寸满足双吊同步转动,但并不适用于装载货件长度超过双吊纵向轴心间距的重大件货。因此,本文结合自己的研究和以上文献所提出的稳性调节方法,给出当货件长度超过双吊纵向轴心间距时的吊装方案设计方法,并以实船吊装操作为例验证该方法的可行性。
1 转动路径规划
1.1 坐标系的建立
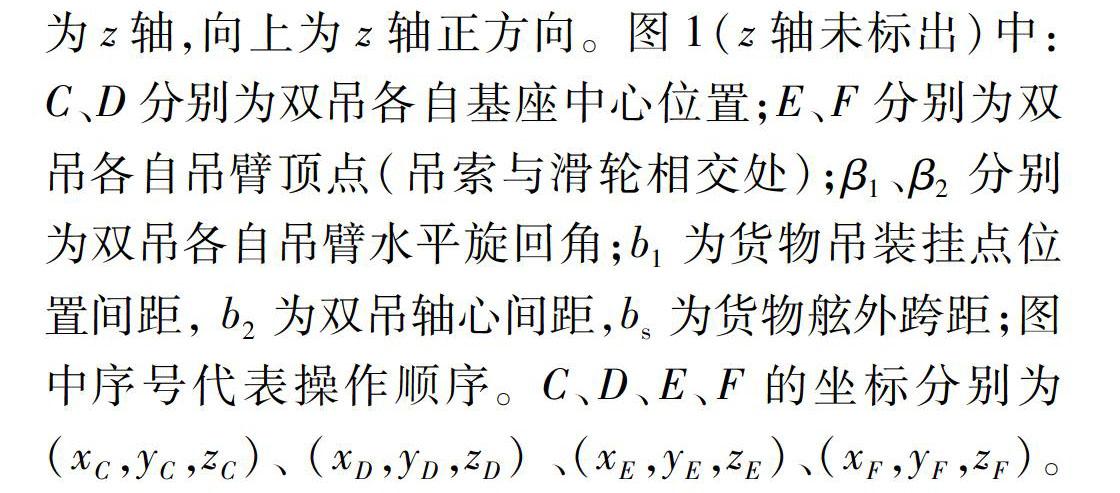
首先建立船体坐标系:中线面、中站面和基平面的交点为原点O;中线面与基平面的交线为x轴,船艏方向为x轴正方向;中站面与基平面的交线为y轴,右舷方向为y轴正方向;中线面与中站面的交线为z轴,向上为z轴正方向。图1(z轴未标出)中:C、D分别为双吊各自基座中心位置;E、F分别为双吊各自吊臂顶点(吊索与滑轮相交处);
β1、β2
分别为双吊各自吊臂水平旋回角;b1为货物吊装挂点位置间距, b2为双吊轴心间距,bs为货物舷外跨距;图中序号代表操作顺序。C、D、E、F的坐标分别为 (xC,yC,zC)、 (xD,yD,zD) 、(xE,yE,zE)、(xF,yF,zF)。
据此建立双吊系统坐标系,见图2:双吊各自吊臂的水平回转中心分别为原点O1、O2,所在平面分别为x1O1y1平面和x2O2y2平面;x轴沿船长方向,指向船首;y轴沿船宽方向,指向左舷;z轴竖直向上。
图2中:α1、α2分别为双吊各自吊臂的仰角;hc为货物起吊后高度(货物最低处距地面高度);Lb为吊臂长度;Lp为货件长度。
1.2 转动路径参数计算
设计吊装方案时需注意在货物转动过程中是否满足吊索
始终位于铅垂线上
、双侧吊臂负载小于额定载荷、货物端部与吊机间存在1 m以上的安全距离、船舶的稳性和横倾符合规范等安全要求。根据图2可知,货物的转动路径由货物吊起后高度、吊臂仰角和吊臂水平旋回角三个自由度控制[7]。其中货物起吊后的高度可提前设定,故作为已知量看待。对于吊臂仰角,以往多采用不断调整其大小的方法来保证吊索
始终位于铅垂线上,但因吊臂的额定载荷、货物端部与吊柱间距、船舶初稳心高度和横倾角均会随仰角变化而变化[8-10],本文根据安全规范将其设定为无须调整的常量。由图1可知,吊臂仰角越小,转动过程中所需步骤越多,货物横移过程越复杂,因此可选取接近αmax(吊臂仰角可允许最大值)的最大整数值作为固定的吊臂仰角。利用式(1)和吊机性能参数计算吊臂仰角的安全范围,即可确定较为合适的吊臂仰角。
Lbcos αmax-(Lp-b1)/2≥1
b2s+(b2-b1/2)2≤(Lbcos αmax)2
(1)
因此,在已知两个自由度的情况下,只需计算出双吊各时刻的水平旋回角,即可生成货物的转动路径。在不考虑风浪的影响和保证吊索
始终位于铅垂线上
即双吊顶点始终等距的情况下,求取双吊各时刻的水平旋回角[11]:
xE=xC+Lbcos α1cos β1
yE=(yC-Lbcos α1sin β1)cos θ
xF=xD+Lbcos α2cos β2
yF=(yD-Lbcos α2sin β2)cos θ
(2)
(xE-xF)2+(yE-yF)2=b21(3)
式中:θ为船舶横倾角,(°)。
为保证装卸安全,本文将调节后的船舶横倾角设定在3°以内,因此横倾所引起的cos θ对吊臂水平旋回角的影响可忽略不计。于是联立式(2)、(3),化简后可得
β1=cos-1Lbcos α2sin β2
(b2-Lbcos α2cos β2)2+(Lbcos α2sin β2)2-
sin-1b21-b22-L2b(cos2α1+cos2α2)+
2b2Lbcos α2cos β22Lbcos α1(b2-Lbcos α2cos β2)2+
(Lbcos α2sin β2)2(4)
β2=-cos-1Lbcos α1sin β1
(b2+Lbcos α1cos β1)2+(Lbcos α1sin β1)2+
sin-1b22-b21+L2b(cos2α1+cos2α2)2+
2b2Lbcos α2cos β12Lbcos α2(b2+Lbcos α1cos β1)2+
(Lbcos α1sin β1)2
(5)
2 稳性控制
在吊装超长重大件货的过程中,从货物起吊至被完全吊起,货物重心逐渐移至吊臂顶端,稳性骤降的同时也可能会产生大角度横倾。此时,可采用从起吊一侧压载舱向另一侧对应压载舱调拨压载水的方法来调节;随着货物向舷内移动,横倾幅度逐渐减小,此时再进行压载水回调。此方法的目的就是控制吊装过程中船舶的横倾角始终小于15°,使之可以按照初稳性问题计算。虽然超长重大件货的质量可至上百吨,但对数万吨级船舶而言,在质量上仍不足其10%[12];雖然本文设计的方案会使货物在吊装过程中有些许纵向的移动,但船舶初始载况已经充分考虑了这些因素,能够保证吃水差的少量变化不会对船舶吊装和安全产生较大影响;本文吊装货物的最终位置和初始位置近似对称(见图1),故不需要在装卸过程中纵向调拨压载水来控制船舶纵倾。
2.1 稳性核算
重吊船货物装卸期间的稳性要求在2008 IS Code中并未单独提及[13],但由于船舶的稳性大小会直接影响船舶的横倾角,出于控制船舶横倾角方面的考虑,一些专业的重大件运输公司建议此类船舶的初稳心高度应大于1.0 m。因此,本文根据此项安全要求并结合双吊联动作业时的船舶稳性变化(见图3,图中
WL、W1L1分别为船舶起吊货物前、后的水面线,M为船舶初稳心),以文献[14]中所列公式为基础,推导出适合此种工况下的初稳心高度核算公式:
h2=h1+(ms((Lbsin α1+Lbsin α2)/2+H+h-
zs)-m((Lbsin α1+Lbsin α2)/2+H+h-h0)+
mb(Lbsin α1+Lbsin α2)/4)/(Δ+m)
(6)
图3和式(6)中:线段G2M的长为吊装物体后的初稳心高度,用h2表示,m;线段G1M的长为经自由液面修正后的初稳心高度,用h1表示,m;m为吊装货物的质量,t;ms为横梁和绳索的质量,t;
mb为每个吊臂的质量,t;H为船舶型深,m;h为吊机的底座高度,m;
KG为船舶初始重心高度,用h0表示,m;zs为横梁、绳索初始位置距基线高度,m;
Δ为船舶初始排水量,t。
我国港口重大件装卸作业技术[15]对起重设备工作时的横倾角有严格标准,规定重吊船作业状态下横倾角应不大于3°。以此为标准,同样依据文献[14]推导出此种工况下的船舶横倾角计算公式:
tan θ=-(Lb(cos α1sin β1+cos α2sin β2)×
(m+(mb+ms)/2)+
(m+mb+ms)(B-2R))/(2(Δ+m)h2)
(7)
式中:B为船宽,m;R为吊机基座的半径,m。
2.2 稳性调节
控制稳性的目的就是使船舶在整个吊装过程中始终处于近似平行沉浮的状态。采用向左右舷对应边压载舱调拨压载水的方法,既可以省去因大量打排压载水而造成船舶稳心高度大幅度变化的风险,又可控制货物移动所产生的船舶横倾。根据文献[14]可知,吊装时所需调拨压载水量的计算公式为
mw=(Δ+m)h2tan θyR-yL
(8)
式中:mw为调拨压载水量,t;yR为右边压载舱横向坐标,m;yL为左边压载舱横向坐标,m。
3 实例分析
3.1 初始参数设置
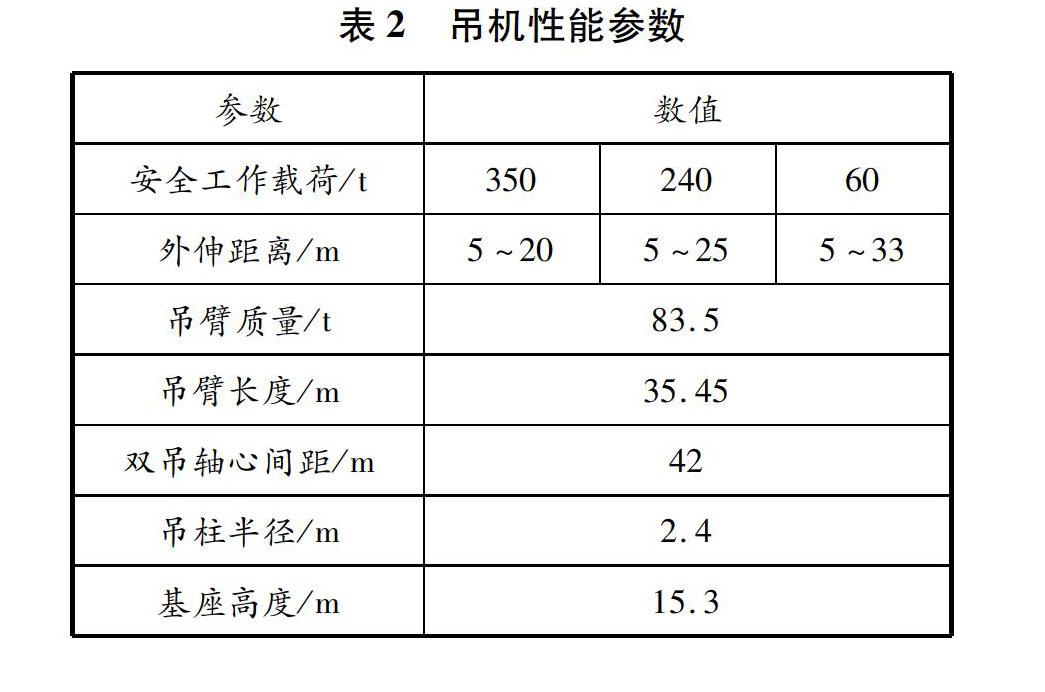
选取3万吨级重吊船实船为例,其部分参数见表1。在该船二舱与三舱间(吊机1位置)、三舱与四舱间(吊机2位置)配置2台型号均为350t并可以联合操作的吊机,其部分参数见表2。
该船设有艏艉尖舱(fore/aft peak tanks, FPT/APT)、左右各11个边压载舱(side water ballast tank port/starboard, WBP/WBS)和11个底压载舱(double bottom water ballast tank port/starboard, DBP/DBS),初始状态压载水配置情况见图4。其中边压载舱5、6、7、8为平衡水舱,利用这些平衡水舱相互间调拨压载水完全可以控制船舶横倾[5]。此时船舶排水量Δ=19 208.6 t,重心高度h0=9.21 m,经修正后的初稳心高度h1=4.94 m,横倾角θ=0°。吊裝的超长重大件货为非均质圆柱体的炼油机部件(长Lp=45 m,半径dp=4 m),质量为580 t,重心位于距其右端部5/9位置处,位于左舷外(bs=14 m),预装至舱盖上(yL=0),与船舶艏艉方向平行,吊装挂点位置间距b1=25 m且对称。本次吊装所使用的横梁、绳索的质量ms=32 t,原摆放于yR=0,zR=14.8 m位置处。
3.2 吊装方案设计
将货件沿图1所示轨迹装至目标位置。利用C++编程语言对图5所示算法进行求解。首先,根据式(1)和吊机性能得到
45.20°≤α1≤62.48°,
55.66°≤α2≤62.48°,故可选取α1=α2=62°,将其代入式(9)得到主吊的水平旋回角初始值β2=57.246°,将所得结果代入式(4)计算各组水平旋回角。重复上述过程至无值输出(表示继续减小β2将
使吊索与铅垂线间产生偏角
),此时的最后一组旋回角为
β1=198.312°,
β2=-77°。然后,交换吊机主次关系并对β1=198.312°取整,将其代入式(5)计算后续的各组水平旋回角,同样重复此过程至货物抵达指定位置。最终,通过算得的各组水平旋回角值结合吊臂仰角生成货物的转动路径,见图6。
β1=π-sinbsLbcos α1,
β2=sinbsLbcos α2
(9)
根据上述计算所得的各时刻水平旋回角和吊臂仰角,对货件的吊起、横移和下落过程进行稳性调节,具体操作步骤见表3。吊起过程参照文献[5]采用分段起吊的方法,每次吊起58 t,根据式(6)~(8)得出此过程需从左舷边压载舱5、6、7(yL=-12.6 m)逐次向对应右舷边压载舱(yR=13.0 m)调拨671.6 t压载水。横移过程是将各组水平旋回角和吊臂仰角代入式(6)~(8),求出双吊每次变幅后的初稳心高度、横倾角和所需回调压载水量。最终的下落过程可看作船内货物垂直下移,且因货物重心始终位于船舶重心之上(见图3),此时船舶浮态保持不变,初稳心高度增加,所以无须调拨压载水来控制船舶稳性。
上文所采取的分段吊装方法可使货物所产生的倾斜力矩缓慢地作用于船舶上,以致于船舶倾斜的角速度和角加速度小到可以忽略不计的程度。同时,在吊机回转过程中,为保证货物安全并使吊索始终位于铅垂线上,每次旋回角也选取得尽可能小,使得整个吊装过程比较缓慢,因此可利用静稳性相关原理进行计算。最终根据计算得到的各阶段船舶初稳心高度、横倾角和货物无碰撞转动路径可知,在保证无碰触的前提下,船舶稳性规范要求被满足,因此该吊装方案安全可行。
4 结束语
本文提出的吊装方案设计方法先是对吊装作业中的横移过程进行货物转动路径规划,进而对吊装全过程进行稳性调节。该方法一方面可以根据计算得到的双吊吊臂仰角和各时刻水平旋回角准确判断货物横移过程有无碰触危险,另一方面可以通过所得角度值进一步计算出各步骤所需调拨压载水量,以便提前把握吊机起吊和回转速度以及确定吊装过程中船舶的稳性和横倾状态是否符合规范。该吊装方案设计方法为双吊联动吊装超长重大件货提供了新思路,提高了作业效率和安全性。通过将其应用于实船吊装作业,验证了该方法的可行性。
参考文献:
[1]ZHAO Xinsheng, HUANG Jie. Distributed-mass payload dynamics and control of dual cranes undergoing planar motions[J]. Mechanical Systems and Signal Processing, 2019, 126: 636-648. DOI: 10.1016/j.ymssp.2019.02.032.
[2]徐邦祯, 姜华. 重大件货物装卸中船舶稳性的计算及调整[J]. 大连海事大学学报, 2003, 6(5): 32-33. DOI: 10.16411/j.cnki.issn1006-7736.2003.01.013.
[3]TOSTANI H H, HALEH H, MOLANA S M H, et al. A bi-level bi-objective optimization model for the integrated storage classes and dual shuttle cranes scheduling in AS/RS with energy consumption, workload balance and time windows[J]. Journal of Cleaner Production, 2020, 257: 120409. DOI: 10.1016/j.jclepro.2020.120409.
[4]王玉闯, 史国友, 李伟峰. 装卸重大件货物对船舶稳性的影响[J]. 中国航海, 2018, 41(2): 81-85, 106.
[5]王洪贵, 吴兆麟, 王海江. 重吊船大件货物吊装方案[J]. 船海工程, 2018, 47(1): 141-146.
[6]柳杨. 单舱大开口重吊船破舱稳性及吊装稳性研究[D]. 上海: 上海交通大学, 2009.
[7]CHANG Yu-Cheng, HUNG Wei-Han, KANG Shih-Chung. A fast path planning method for single and dual crane erections[J]. Automation in Construction, 2012, 22: 468-480. DOI: 10.1016/j.autcon.2011.11.006.
[8]陈新权, 何炎平, 李洪亮, 等. 全回转起重船吊索动力荷载及其对浮态及稳性的影响[J]. 上海交通大学学报, 2010, 44(6): 778-781, 786. DOI: 10.16183/j.cnki.jsjtu.2010.06.013.
[9]CAI Panpan, CHANDRASEKARAN I, ZHENG Jiamin, et al. Automatic path planning for dual-crane lifting in complex environments using a prioritized multiobjective PGA[J]. IEEE Transactions on Industrial Informatics, 2018, 14(3): 829-845. DOI: 10.1109/TII.2017.2715835.
[10]李瑞, 汪骥, 韩小岗, 等. 基于粒子群算法的船体分段吊装方案优化设计方法研究[J]. 中国造船,
2016, 57(3): 185-197.
[11]杨洲. 船舶装卸重大件货物方案设计研究[D]. 大连: 大连海事大学, 2015.
[12]CAI Panpan, CAI Yiyu,CHANDRASEKARAN I, et al. Parallel genetic algorithm based automatic path planning for crane lifting in complex environments[J]. Automation in Construction, 2016, 62: 133-147. DOI: 10.1016/j.autcon.2015.09.007.
[13]国际海事组织. 2008年国际完整稳性规则(2008年IS规则)及其解释性说明[S]. 北京:
人民交通出版社, 2008.
[14]杜嘉立, 姜华. 船舶原理[M]. 大连: 大连海事大学出版社, 2016.
[15]中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 港口重大件裝卸作业技术要求: GB/T 27875—2011[S]. 北京: 中国标准出版社, 2011.
(编辑 赵勉)
