基于PLC的智能泳池液位控制系统设计*
2021-08-07陈佳荟赛秀杰袁治倩泽朗准
陈佳荟,赛秀杰,袁治倩,泽朗准
(1.西北民族大学 电气工程学院,甘肃 兰州 730030;2.西北民族大学 数学与计算机科学学院,甘肃 兰州 730030;3.西北民族大学 实验教学部,甘肃 兰州 730030)
自20世纪50年代以来,由于计算机技术的发展,带动了智能行业的惊人成就,特别是在工业过程控制中更是无不涉及智能技术。智能泳池控制是工业过程控制中的一种典型的非线性、大时延、容量滞后的过程控制系统,研究智能泳池液位控制的数学模型和控制策略具有重要的理论意义及实际应用价值。基于PLC(Programmable Logic Controller,简称PLC)的智能泳池液位控制系统,控制对象为工业过程控制中常见的水箱水位,通过设计比例-积分-微分控制(Proportion-Integral-Differential Control,简称PID控制)和模糊PID控制算法,实现对高阶、非线性、大时延的智能泳池液位系统进行有效控制。本设计主要从智能泳池控制系统的数学模型、模糊PID控制算法、基于PLC的控制系统设计、LabVIEW监控实验平台设计、系统仿真分析等方面对系统进行全面的设计和分析。智能泳池控制系统数学模型的研究手段是采用机理分析对系统建模,建模过程尝试用微分方程和传递函数进行模型表达。控制算法部分主要是通过阅读国内外相关论文,结合本科学习期间学习的相关理论课程进行分析设计。
1 三容水箱系统分析与模型建立
1.1 模型介绍
对于智能泳池控制系统来说,当某种形式的扰动作用于对象时,就会引起系统的输出量发生相应的变化,这种变化可以用数学表达式中的微分方程或传递函数进行描述,称为被控对象的数学模型,它用于表征对象的特性,特别是动态特性。
智能泳池控制系统的实际模型的动态特性具有非线性特点,这将使对象的数学模型及分析处理过程变得复杂。本文所研究的智能泳池控制系统是有自平衡能力的对象,即当智能泳池控制系统受到外部干扰时,平衡状态被破坏后,不需要外加任何控制作用,仅靠对象自身的特性重新达到新的平衡状态的能力。
1.2 智能泳池控制数学模型推导
图1中,阀门R1、R2、R3为全开状态,阀门R0的开度可控,且流入R0的量为系统的输入,以水箱T3的液位高度h3作为系统输出,即构成单输入单输出的三阶系统对象。
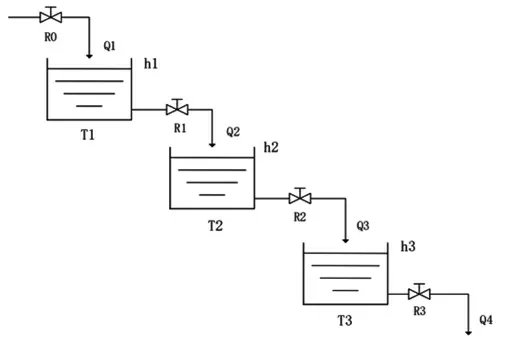
图1 结构图
系统的传递函数如下:

式中,K为三容水箱系统的放大参数,T1、T2、T3分别为上、中、下水箱的时间常数。
图1所示系统结构的特点是受到扰动后,被控量的变化速度开始变化比较缓慢,而要经过一段延迟时间以后响应速度才能达到最大。
1.3 时域法辨识智能泳池模型参数
上文通过机理分析方法建立了智能泳池控制系统的数学模型,为了进一步探讨控制对象的控制方案,还需要确定系统的详细参数,现假设模型相关参数定义如下:
(1)水箱中液体流动性好,粘滞力可忽略不计;
(2)三容水箱控制阀门的动作延时可忽略,且忽略阀门工作的非线性因素;
(3)系统中所有阀门的液阻恒定且相等。
由于此系统的实际参数模型与具体的实验设备有关,为了方便研究模型参数定义如下:
(1)电磁阀的工作状态只有开或关两种,对应继电器线圈的得电或失电;
(2)阀门R1、R2、R3的液阻均为R=300s/m2。
为了简便计算,模型采用等容环节的串联来近似,因此:

若阶跃响应时取K=10,系统的纯滞后和容量滞后时间取τ=10s,则系统的开环传递函数可以表示为:

为了探究模型参数是否具有合理性,用MATLAB/SIMULINK工具箱搭建开环系统的仿真模型,如图2所示。
图2模型中,开环系统的输入为单位阶跃信号,示波器输出系统的阶跃响应曲线如图3所示,根据得到的阶跃响应曲线可知,此三容水箱模型具有自平衡能力,但是当系统自然稳定时系统的液位为10m,远远超过了设定水箱的高度1m,因此为了达到设计要求需要在三容水箱系统中加入控制器,使得系统的输出液位保持在0~1m之间的任意设定值。

图2 智能泳池开环系统的仿真框图
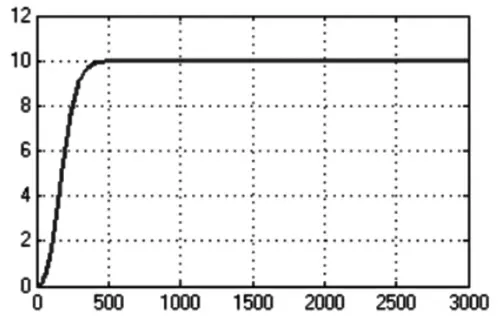
图3 智能泳池开环系统的单位阶跃响应曲线
2 智能泳池液位控制系统的控制算法研究
智能泳池液位控制系统由一个检测转换环节、控制器、执行器和被控对象组成,系统可以简化为由广义对象和控制器两部分组成,如图4所示。
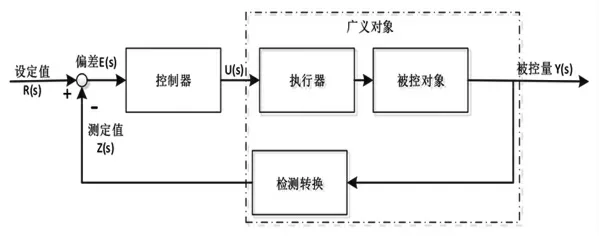
图4 智能泳池液位控制系统结构图
3 基于PLC的智能泳池液位控制系统设计
智能泳池控制系统是控制中的一种典型被控对象,第2章主要研究泳池智能液位控制系统的PID和模糊PID液位控制算法,并对所设计的控制算法进行分析和验证。在工业现场,一般采用PLC作为系统的控制器,因此,为了进一步完善对象的液位控制系统,本章将讨论智能泳池液位控制系统的硬件模型、设计控制系统的主电路、PLC的外部接线电路和PLC程序流程图。
智能泳池液位控制系统由控制对象、执行机构、检测机构和控制器等部分组成。控制对象由三个等容的水箱呈阶梯式串联组成,执行机构由水泵和电磁阀门组成,检测机构主要由各水箱的液位传感器组成,PLC是系统的控制核心,三容水箱液位控制系统示意图如图5所示。

图5 智能泳池液位控制系统示意图
如图5所示,阀门R1、R2、R3为手动控制阀,手动阀门R1、R2、R3分别是水箱T1、T2、T3的泄水阀;阀门DF为电动调节阀门,由电动调节机构和阀门组成,开度可控;阀门F1、F2、F3为电磁阀,由电磁线圈和阀门组成,其开关状态由电磁机构控制。阀门DF、F1、F2、F3的工作状态由PLC的输出信号控制,其中DF的开度大小体现控制器对三容水箱系统的控制输入,F1、F2、F3为控制系统的扰动输入;Q1、Q2、Q3、Q4分别表示DF、R1、R2、R3阀门的液体流出量,QD1、QD2、QD3分别表示F1、F2、F3阀门的液体流出量;T1、T2、T3分别表示三个等容的水箱,每个水箱上安装有液位传感器LT用于检测水箱液位;图5中粗实线表示液体管道,细实线表示传输信号的电缆线路。
三容水箱液位控制系统的工作原理如下:在系统投入工作前,先手动将阀门R1、R2、R3置于全开的状态,待三个水箱存留液体放干后再启动系统,防止系统存在初始干扰。当电磁阀F1、F2、F3一个或多个打开时,表示系统加入了阶跃扰动输入,将会给系统增加扰动输入量,因此电磁阀F1、F2、F3是用于验证系统的抗干扰能力,当测试系统在扰动作用下的控制效果时,需要将这几个电磁阀全部或部分打开。
4 结束语
基于PLC的智能泳池液位控制系统,以三容水箱为被控对象,PLC为控制器核心,控制器分别采用PID和模糊PID为系统的主要控制算法,执行器为电磁阀、驱动控制阀、检测元件和变送器用于检测水箱水位变化,三容水箱在工作时按照设计要求在扰动出现后必须通过控制方案将水箱的水位重新保持在一定高度。
设计主要对控制对象的数学模型、液位定值控制策略、控制系统的PLC程序设计、LabVIEW上位机实验仿真系统等进行了探讨和研究,具体内容如下:
控制系统的PID控制:PID算法重点在于参数整定,PID控制器的参数整定主要采用经验法和模糊推理的方法,设计过程中先通过经验法对常规的PID进行参数整定,并验证控制效果,再用较为先进的模糊图例和推理方式进行PID参数整定,并通过仿真验证控制效果。