自动泊车系统测试方法研究
2021-08-05马煜森
马煜森
(广州汽车集团股份有限公司汽车工程研究院,广东 广州 511434)
关键字:自动泊车系统;测试方法;评价指标
引言
在汽车智能化的浪潮中,汽车传感器发展迅速,越来越多搭载了先进传感器的汽车进入了我们的视野[1]。为了解决现代城市生活中停车难、取车难的一大痛点,泊车辅助技术应运而生。自动泊车系统是未来全自动驾驶系统的重要组成部分,对自动泊车系统的测试方法的研究也十分迫切。
泊车辅助技术主要分为4个等级,本文研究的自动泊车系统特指通过将超声波雷达和摄像头信息融合,可识别到空间车位和线车位,自动控制转向、制动、发动机和变速器来实现水平泊入、垂直泊入和水平泊出的泊车辅助技术。此种泊车技术仍需驾驶员通过车内的泊车开关来实现泊车的开始,监控和停止。在紧急情况下,驾驶员有责任随时中断泊车。图1为该自动泊车系统的具体运行模式。

图1 自动泊车系统的运行模式
1 测试方法的选取
测试方法主要指测试内容的组织形式以及开展测试的途径,由于智能驾驶系统激活后车辆一切行为是系统自主决策的结果,所以智能驾驶系统的测试原则是必须提供车辆自主决策的自由度[2],同时测试需具备可重复性和可控性。依据测试内容的组织形式,测试方法主要分为基于用例的测试方法和基于场景的测试方法。
基于用例的测试方法是指通过预先定义的测试用例来测试车辆的某项功能是否满足特定条件下需求的方法。该测试方法的特点就是对测试过程和测试结果有明确的要求。
基于场景的测试方法是指通过预先设定的场景,要求车辆完成某项特定目标或任务来对系统进行测试的方法,图 2为基于场景的测试方法示例。该测试方法的特点在于对测试结果没有明确要求,在不违背给定目标或任务的情况下,系统可以自主选择采取何种方式来处理当前状况,具有很高的自由度。
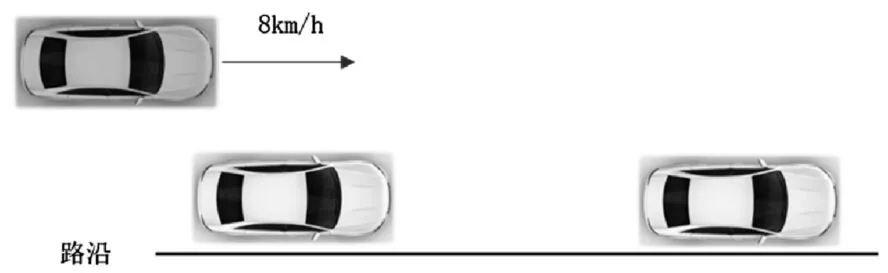
图2 基于场景的测试方法图示
通过分析,基于用例的测试方法在应用于功能相对复杂和综合的自动驾驶系统时存在一定不足:首先,该方法只能对某项功能进行测试,而无法测试多项功能的综合表现;其次,由于对测试结果有着明确的要求,自动驾驶系统的自主决策能力难以体现。而基于场景的测试方法只规定了测试的初始条件,不预设测试过程以及测试结果,可以提供系统自主决策的自由度,能够对自动泊车系统多种功能的综合性能进行测试,因此自动泊车系统的测试采用基于场景的测试方法。
2 测试方案设计
为了使自动泊车系统的测试内容、测试环境和测试方法的设计变得有标准可依、有规律可循,必须建立标准化,模块化的测试内容。具体流程见图3。

图3 自动泊车系统测试设计流程
2.1 场景分析
场景描述了特定时间段内发生的事件过程,一般将场景理解为多个事件顺序发生而构成的序列,并会延续一段时间,或简单理解为事件的剧本,描述一定空间和时间范围内的所有环境以及交通参与者的状态、行为过程及目的。
自动泊车系统的智能行为受限于车位环境的各种要素,如道路类型、停车位类型、车位路面、障碍物、天气等。所有的要素的集合构成了自动泊车系统的测试场景要素库。德国“飞马计划”自动驾驶测试体系将场景分为功能场景、逻辑场景和具体场景,功能场景主要指按照系统的功能需求开发的,逻辑场景则是通过将结构化场景与参数范围相结合得以定义。任何一种测试场景既可以由功能场景组合而成,也可以由功能场景与逻辑场景两者混合组成,这些组合具有瞬时性,随着车辆或其他交通参与者在环境中运动,场景要素组成也不断地发生变化,自动泊车系统的表现也实时变化。经过梳理确定自动泊车系统的功能场景及逻辑场景,见表1。
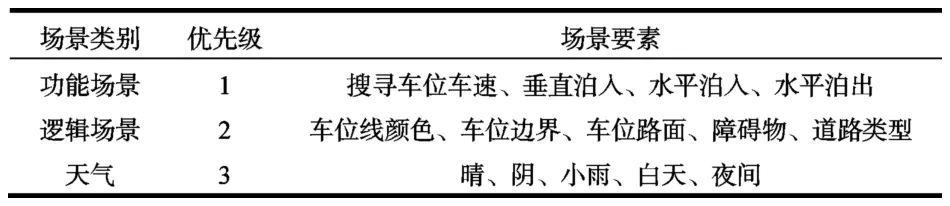
表1 自动驾驶系统测试场景分类及要素
2.2 测试场景设计
要素分类矩阵组合可以对应于实际交通中可行的测试场景,涵盖可能导致事故或风险的关键场景,场景参数和分布范围可以分析泛化自然驾驶、危险场景,经验场景等数据。通过定义场景的所有可能元素及各类场景要素组合,并在不同层级中进行描述,解决基于场景的测试方法的测试输入问题,并形成自动泊车系统的具体测试场景和初始条件输入,作为自动泊车系统测试的起始工况。
经过以上分析,自动泊车系统的测试场景要素库由搜索车位车速、泊车类型、车位类型、道路、障碍物、天时6个一级要素构成,一级要素还下分二级要素类、三级要素类,见图4自动泊车系统测试场景要素组成。
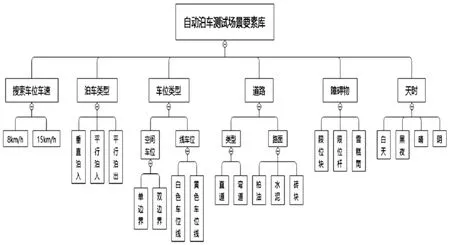
图4 自动泊车测试场景要素组成
通过对场景数据得到的参数分布进行场景参数的组合或随机算法,从逻辑场景中设置特定的参数组合定义具体场景,设计不同难易程度的模块化多层次自动泊车系统测试场景。下面给出4种具体场景示例,其余不一一示例。
具体场景1:晴天白天,自动泊车车辆以8 km/h车速搜索车位,停入单边界空间垂直车位,道路为直道柏油路面。
具体场景2:晴天黑夜,自动泊车车辆以8 km/h车速搜索车位,停入白色车位线平行车位,道路为直道柏油路面。
具体场景3:阴天白天,自动泊车车辆以15 km/h车速搜索车位,停入含有限位块的黄色车位线垂直车位,道路为直道水泥路面。
具体场景4:晴天白天,自动泊车车辆以8 km/h车速搜索车位,停入双边界空间平行车位,道路为弯道砖块路面。
2.3 评价指标
自动泊车系统的评价应从功能开发需求输入为基准,对子能力分别进行测试评价直观反映各子能力的优劣[3]。自动泊车系统的主要功能体现在车位搜索能力,车位释放限制条件是否合理、泊车过程中的路径规划及舒适性问题。故选取车位识别率、车位释放能力、泊车能力、舒适性作为自动泊车系统的测试评价依据
3 测试结果分析
通过试验方法的选取,自动泊车场景分析、各场景下的要素确定及评价指标的选择,将测试内容转化为任务表单的形式开展测试。本文选取某款搭载预研自动泊车系统的车辆进行实车测试。
3.1 车位识别与车位释放能力分析
车位识别率,主要用于判断环视与车辆运动信息的库位闭环跟踪能力,系统必须在设计范围内达到特定的通过率。同时需要根据实际环境和误识别率,判断车位释放限制条件是否合理,测试数据见表2。

表2 某车型自动泊车系统车位识别率
由表2可知,该预研车型识别率为91.26%,基本达到设计目标,但有进一步提升空间。车位的误识别数为95次,识别率为 6.59%,系统在进行车位判断时限制条件较松,需要进一步进行优化,减少误识别,从而提升系统使用体验。
3.2 空间车位与车位线车位分析
该预研车型的自动泊车系统由摄像头和12个超声波雷达。其中摄像头安装在车内后视镜位置,12个超声波雷达分别安装在车辆前后保及两侧车身。空间车位与线车位的测试统计表见表5和表6。由表3和表4可知,该车型的双边界空间车位识别情况较好于单边界空间车位,黄色车位线的车位识别比白色车位线的识别情况差。综合来看,空间车位的识别率为92.08%稍优于线车位,表明搭载的自动泊车系统超声波雷达标定效果良好,对空间距离感知良好。但是摄像头对黄色车位线的识别较差,需要进一步进行算法优化。

表3 某车型自动泊车系统空间车位测试统计表
3.3 泊车能力分析
自动泊车系统的泊车能力主要依据泊车完成姿态及揉库次数进行判定。泊车完成姿态细分为良好,向左倾斜,向右倾斜,泊入失败等,判断系统路径规划能力,揉库分为泊入揉库次数和泊出揉库次数,测试统计见表5、表6。

表5 某车型自动泊车完成姿态测试统计表

表6 某车型自动泊车揉库次数测试统计表
由表5和表6分析可知,泊车完成良好率较差为84.79%,且车身姿态向右倾斜较多;揉库次数基本为3次和4次;表明该自动泊车系统需要进一步优化路径规划算法,同时提高对库位环境适应能力。
4 结论
本文对自动泊车系统的测试方法、场景及要素进行了分析,并明确了相关评价指标,设计了自动泊车系统的测试内容。通过某预研车型的自动泊车测试,验证了该测试方法的可行性与有效性。主要结论有:
(1)自动泊车系统的测试需要采用基于场景的测试方法,提供系统自主决策的自由度,对自动泊车系统多种功能的综合性能进行测试。
(2)采用功能场景与逻辑场景结合,任务表单式的测试设计可以对自动泊车系统进行全面的测试,对开发和性能优化具有一定的帮助。
(3)在实车测试中开展测试耗时耗力,今后可以采用此方法先进行在线仿真测试,对相关设计参数指标进行评估后,仅针对待优化功能开展测试,以提高研发验证效率。