车载激光扫描技术在公路带状图测量中的应用
2021-08-04郭保
郭 保
(新疆维吾尔自治区第一测绘院,新疆 昌吉 831100)
0.引言
在公路测绘中通常是以全野外的方式来获取测量数据。由于需要测量人员进行大量的地面作业,作业周期较长,且工作效率低下,很难适应当前道路改扩建的需求。车载激光扫描系统是将汽车作为载体,搭载三维激光扫描系统,在车辆行进的过程中得到道路两侧的点云数据,再通过轨迹匹配以及点云解析获得目标点位的三维坐标。近年来随着三维激光扫描系统的不断完善和进步,车载激光扫描技术在各行各业有着更广泛的应用价值。
1.车载激光扫描技术的工作原理及特点
1.1 工作原理
车载激光扫描系统是将三维激光扫描仪、导航定位系统和惯导系统联合使用,实现对动态扫描快速定位的测量系统。其工作原理是车辆在移动过程中,GPS测量记录扫描仪运行轨迹在世界坐标系中的实时位置;激光扫描仪则记录目标的大小、形态和距离;惯导系统则计算扫描仪的运行姿态;然后利用时间和空间上的检校信息,通过统一的地理参考和解析处理实现动态实时的获取目标点三维坐标信息的功能。
车载激光扫描系统(如图1所示)主要由以下几部分组成:三维激光扫描仪、GNSS天线、高精度IMU、电子转台、里程计、线阵相机和笔记本电脑;三维激光扫描仪、相机和惯导系统固定在电子转台上,里程计安装在车辆的轮胎上。
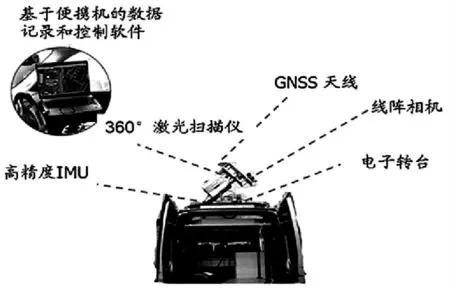
图1 车载激光扫描系统
1.1.1 车载激光扫描系统实现技术同步
车载多传感器同步技术是车载三维激光扫描技术的重中之重。首先通过同步控制软件将各组件开始数据采集的时间相统一;然后采集数据时以流动站卫星定位接收机的时间为标准,GPS向激光和惯导系统不断地发秒脉冲与此同时激光与惯导系统向卫星定位接收机的I/O口打标,这样就能将激光和惯导系统采集到的数据贴上世界协调时的标签,而激光发出的秒脉冲可以通过电子转台和线阵相机的控制及来实现时间上的同步。卫星定位接收机向安装在轮胎上的里程计发出脉冲,用来控制其数据的采集,再对各个传感器采集到的观测数据值进行外推和内插,这样就可以保证每个传感器的数据建立在共同的时间坐标轴上,也就能实现各系统数据的融合处理,各个系统的时间同步实现(如图2所示):

图2 时间同步实现示意图
1.1.2 GPS和IMU相辅相成
GPS可以提供非常准确的位置,有着较高的稳定性。虽然利用GPS差分定位技术可以得到厘米级的精度,但由于大型的构建筑物的遮挡或多路径效应,经常会遇到一直处于浮动状态、定位精度差的情况。惯导系统却具备在不良环境中能够实现平稳输出的优点,其有较高的稳定性,缺点是伴随着时间积累,导航精度下降。车载三维激光扫描系统加入惯导系统进行辅助导航定位,正好能与GPS取长补短,如果GPS因为遮挡失去锁定时,惯导系统这时就可以发挥作用,继续提供导航服务,较好地处理了卫星失锁的问题。
1.1.3 点云数据的匹配融合
惯导系统不但可以提供三维激光扫描系统的姿态信息,还可以提供较为精确的定位信息,从而求出各个扫描点的偏移坐标,再将偏移坐标和扫描车的瞬时大地坐标两两相加,就可以获取扫描点在大地坐标下的坐标值了。在扫描时刻扫描点的单点坐标,按照扫描点的空间姿态,去跟扫描仪获取的距离参数和角度参数进行匹配,就可以推算得到激光点云数据,而且将融合后的三维激光点云数据和线阵相机所获取的物体的纹理数据再一次进行融合,就能得到真彩色的激光点云数据。
1.2 车载激光扫描技术的特点
(1)高精度。能够提供高达6cm的测量精度;
(2)高效率。可快速大量采集空间点信息,可风雨无阻地作业,项目时间大幅缩减;
(3)低强度。人员仅需要操作笔记本电脑,避免日晒雨淋,大量外业工作转至内业;
(4)数据获取自动化。车载激光扫描系统各传感器相辅相成,再加上成熟配套软件,获取数据安全可靠,自动化程度高;
(5)数据获取可视化。获取的点云数据可以全面地反映地形或地貌的表面特征,更加准确、直观,一目了然。
2.案例选取
2.1 项目概况
该项目为S245线,建设项目64000m设计路线长度,500m带宽1∶2000的带状地形图测量,作业区域位于哈密盆地南部的剥蚀地段。地势东南高,西北低。测区地貌以戈壁滩为主,另外有部分沙丘地,测区中南部有部分山地及丘陵地,沟谷较发育。
配套软硬件包括硬件:采集车辆是三菱帕杰罗,V73RIEGLVMZ-1000激光扫描系统一套及Trimble5800GPS基站一台;中测瑞格POSPacMMS7.2轨迹解算软件;中测瑞格数据采集软件RRiACQUIRE-MLS;瑞格点云编辑软件及数据处理软件RiPROCESS;瑞格应用软件RiScanPro。
2.2 项目实施的技术路线
项目实施的技术路线主要分为三大部分:(1)外业数据采集;(2)点云数据处理;(3)精度验证及数据编辑。具体技术路线(如图3所示):
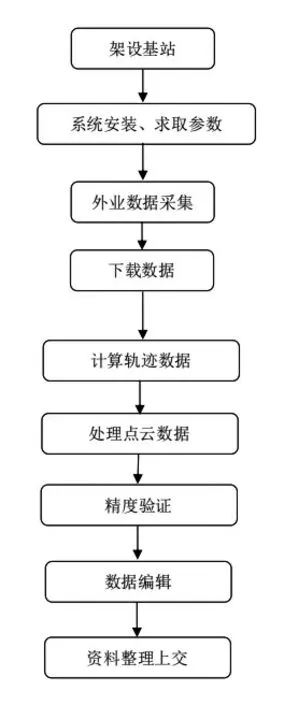
图3 技术路线流程图
2.2.1 外业数据采集流程
对于公路带状图数据的获取,采用车载激光扫描系统对道路进行平移式推扫,在推扫前请设定好行进路线,按照往返路线各采集一遍,这样就能更加准确地获其道路两侧的纹理信息。
(1)在距离线路20km以内的控制点上架设基准站;
(2)车载系统GPS卫星定位接收机在静止状态下对测量车进行实时位置测量5min;
(3)由惯导系统计算GPS接收机、三维激光扫描仪的实时姿态信息;
(4)通过加速、减速,改变车辆的方向,在车载三维激光扫描系统的指标均符合限差以后,由三维激光扫描仪(LS)、GNSS、IMU、车轮解码器(DMI)对以静态基站点20km内的道路两侧进行测量;
(5)最后基于惯导系统获取扫描仪的实时姿态信息,通过联合解算获得点云数据的空间坐标。导出的点云数据图(如图4所示):

图4 点云数据图
2.2.2 点云数据处理操作流程
(1)将采集得到的扫描车轨迹数据、姿态数据、基准站数据、点云数据进行GPS差分处理,完成扫描车的轨迹解算;
(2)点云数据进行平差计算后与轨迹数据进行匹配;
(3)点云数据坐标转换并进行噪点消除和去植被处理;
(4)开展数据建模、地物的提取与绘制、地形图编辑。
2.2.3 精度验证
本项目一共布设了128个检查点,检测其平面坐标及水准高程,然后通过与点云数据中提取与之相对应的点进行坐标比对,从而检核车载三维激光扫描系统的测量精度。从表1精度统计表可知:点云数据平面精度优于6cm,高程精度优于4cm。

表1 精度统计表
3.提高车载激光扫描系统测量精度的方法
通过一系列地测试和分析,认为做好以下5点工作可以进一步提高车载激光扫描系统测量精度:
(1)车载激光扫描系统的精度与基准站的定位精度正相关,所以在作业的过程中就要尽可能降低基站对中、整平误差,从而减少基准站的传导误差;
(2)车载激光扫描系统的精度与扫描车到基准站的距离负相关,距离越远精度越差,尽可能地让其间距不超过20km;
(3)要始终保持定位定姿的平衡。对于地貌起伏较大的复杂地区的车载三维激光扫描作业要求车速不能过快,车速基本保持在20km/h~25km/h匀速前进。路况好,路面平整度高的地区,车速基本保持在30km/h~40km/h的范围内匀速前进。需要注意的是车速也不能过慢,如果车速低于20km/h,车载的IMU不能正常进行姿态测量,无法有效获取三维激光扫描仪的高低角、偏航角及滚动角;
(4)根据项目实际情况,对车载扫描中存在的盲区或是重点区域需要能加扫描时间或者进行停车定点精细扫描;
(5)由于三维激光扫描仪在获取点云数据时产生一些不需要的点云或者是噪音点,就需要对点云数据进行过滤和去噪,这时就需要多一些耐心,反复多操作几遍;将无用的点云数据尽可能地删除干净。
4.结束语
车载激光扫描技术由于克服了传统测量技术的局限性,具有效率高、低成本、测量精度稳定等特点;随着测绘新技术的不断推进,车载激光扫描技术作为一种先进的数据获取手段,凭借实用性强、精确度高、数据采样率高等优势在公路测量领域显现出极大的技术优势,也必将拥有更广阔的市场前景。
