面向通信负载均衡的轨迹优化技术研究
2021-08-04黄玉蕾
林 青,黄玉蕾
(西安培华学院 智能科学与信息工程学院,西安 710125)
0 引言
近年来,国内公共事件和自然灾害时有发生。2015 年 7 月代号为“亚马逊”的超级台风登陆我国境内,类似的不可抗力破坏强大。灾害发生时,地面基站、天线等通信设备可能受到破坏。为了快速恢复通信网络,提高应急救灾响应效率,目前大量研究者开始关注用无人机(unmanned aerial vehicle,UAV)搭建应急通信网络[1-5]。
在搭建无人机通信网络时,无人机的部署将影响应急通信的质量[6],目前常见的无人机应急通信为单无人机系统[7-10]和多无人机系统[11-14]两类。然而单无人机系统难以满足大面积通信覆盖的需求,故在应急救灾场景中需要考虑多无人机协同的应急通信网络构建[15]。目前针对多无人机轨迹优化的研究很少从通信的角度出发考虑通信服务的负载均衡问题[16]。虽然一部分研究中无人机能够为地面用户提供通信覆盖[17],但是无人机之间由于负载不均衡,导致用户性能公平性差[18-19]。
基于上述考虑,本文提出一种面向通信负载均衡的多无人机轨迹优化方案。首先,设计了面向负载均衡的轨迹优化系统结构。其次,以用户数量作为无人机负载衡量指标,构建了基于无人机负载的虚拟力场模型和基于用户位置的虚拟力场模型,再次,设计了基于虚拟力场的无人机控制方法。最后,通过仿真验证了用户通信吞吐量的提升。
1 基于通信负载均衡的无人机轨迹优化系统结构设计
面向负载均衡的无人机轨迹优化系统包括3大类模块,分别是无人机通信环境信息检测模块、虚拟立场计算模块和无人机运动控制模块,如图1所示。

图1 面向通信负载均衡的多无人机轨迹优化结构
无人机通信环境检测模块由图1中左侧实线框中3个子模块构成。具体功能包括用户位置检测,检测信息汇总和用户数量检测。所提出系统以负载均衡为轨迹优化依据,优化过程中,需要考虑对无人机轨迹和系统性能产生影响的两个因素:1)单个无人机下,服务用户的数据传输性能指标;2)多个无人机之间的负载差异。上述两个因素在实际无人机通信系统中可以通过用户位置信息和无人机服务用户的数量来确定。

在得到上述信息后,考虑在优化无人机负载均衡性能的同时需要优化每个无人机对其用户的服务性能。根据虚拟立场理论,设计基于无人机负载的虚拟力场和基于用户位置的虚拟力场,前者用于负载均衡优化,后者用于通信性能优化。
基于无人机负载的虚拟力场(Fv)示意图如图2所示。当两个相邻无人机服务用户数量不同时,用户少的无人机通过向用户多的无人机移动,可以将用户多的无人机的一部分用户分流到用户少的无人机中。

图2 基于无人机负载的虚拟力场
基于用户位置的虚拟力场(Fu)示意图如图3所示,其意义在于将无人机移动到用户分布的几何中心,以实现其覆盖范围内用户数据传输速率的公平性。
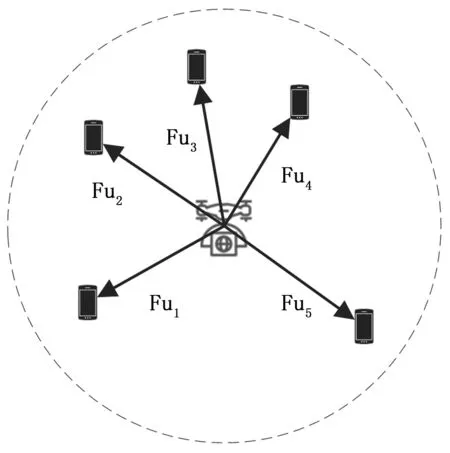
图3 基于用户位置的虚拟力场
在得到两种虚拟力场后,通过力的合成,得到无人机轨迹优化的合力。
2 无人机下行通信系统模型


(1)

在空-地无人机通信模型中,同时存在视距通信和非视距通信。视距通信的概率可以表示为[20]:
(2)
其中:a和b都是由环境决定的系统参数,
(3)
在n时刻,UAVi和UEj的期望路径增益是:
(4)

(5)
假设UAVi的发射功率是pi,则UEj的信干燥比为:
(6)
假设无人机将其带宽平均分配给其服务的所有用户,B0为UAV可用的总带宽,Ni[n]为UAVi在n时刻的服务用户数量,UEj由UAVi提供通信服务时,其获得的带宽为Bi,j[n]=B0/Ni[n],UEj的吞吐量为:
Ti,j[n]=Bi,j[n]log2(1+γi,j[n])
(7)
3 面向下行通信负载均衡的无人机轨迹优化算法
无人机轨迹优化由图1中的无人机控制模块执行,该控制模块由基于用户位置的虚拟力场和基于无人机位置虚拟力场决定。虚拟力场的方向和大小为无人机轨迹优化提供依据。下面首先介绍2种虚拟力场的计算方法,然后给出虚拟力场对无人机轨迹的控制方法。
3.1 基于无人机负载的虚拟力场
基于无人机负载的虚拟力场的目的在于平衡无人机之间的用户数量。以用户数量作为衡量无人机负载的指标,则对于UAVi,在n时刻的负载定义为:
Li[n]=Ni[n]
(8)
其中:Ni[n]是n时刻UAVi服务的用户数量。
当无人机服务用户数量较少时,它需要向相邻的用户较多的无人机方向移动,以分担其部分通信用户,如图2所示。根据上述物理意义,构建基于无人机负载的虚拟力场如下:
(9)

网络中存在多个无人机,但是通过轨迹优化实现负载均衡智能在相邻无人机之间进行。定义指示变量Oi,k[n]表示UAVi和UAVk的相邻关系,当Oi,k[n]=1时,UAVi和UAVk在n时刻的关系是相邻无人机。
考虑到每个无人机附近可能有多个其他无人机,UAVi的总虚拟力场为其对周围每个无人机的虚拟力场叠加,即:
(10)
3.2 基于用户位置的虚拟力场
基于用户位置的虚拟力场的目的在于提升一个无人机通信覆盖下用户性能的公平性,保证每个用户都能使用适当的通信资源。基于用户位置的虚拟力场基本思想是让无人机运动到其用户所在位置的几何中心。
为了实现上述目标,定义基于用户位置的虚拟力场如下:
(11)

(12)
3.3 无人机轨迹优化算法

(13)

(14)
考虑到无人机存在最大速度的约束,单位之间内,其运动距离应小于Vmax,将无人机的运动控制过程改进为:
{xi[n+1],yi[n+1]}=
(15)
当所有无人机单位时间运动距离小于d米时,认为算法达到收敛,d为自由变量,可根据需求设置具体数值。具体算法流程如下。
对于UAVi:
Repeat
1)统计服务用户数量;
2)与相邻无人机交换用户数量信息;
3)根据(8)计算本无人机和相邻无人机负载;
4)根据(9)和(10)计算虚拟力场Fvi[n];
5)获取服务用户位置;
6)根据(1)计算无人机和用户之间的距离;
7)根据(11)和(12)计算虚拟力场Fui[n];
8)根据(13)计算Fi[n];
9)根据(14)获得无人机在n+1时刻的位置;
10)if所有无人机单位时间运动距离小于d;
Break。
在执行上述算法后,可以根据无人机下行通信系统模型验证算法性能。
4 仿真实验
仿真实验中将验证基于用户位置的虚拟力场控制效果、基于无人机负载的虚拟力场和基于用户位置的虚拟力场合力控制下的无人机位置分布、通信负载均衡性能指标等。
4.1 基于用户位置虚拟力场作用效果
单个无人机的场景下,在200 m×200 m的范围,随机初始化无人机位置。假设场景中由50个用户,并以泊松分布初始化用户位置。循环终止参数d=0.3 m,Kv=0.1,Ku=5,在在利用基于用户位置虚拟力场对单无人机轨迹进行控制后,无人机位置仿真实验结果如图4所示。图中星号代表用户,三角标号是无人机初始化位置,通过虚拟力场的轨迹控制后,十字符号是无人机移动收敛后的位置,圆圈是直接将所有用户位置加权平均后的理论最佳中心位置。从仿真可以看出算法控制的结果和最佳理论中心位置十分接近。
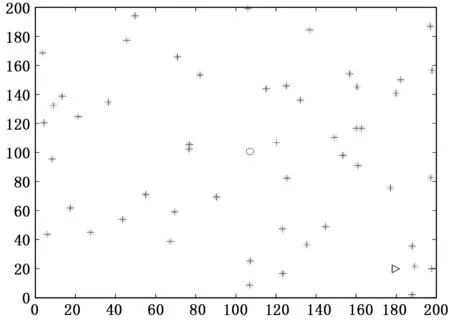
图4 基于用户位置虚拟力场无人机位置控制
4.2 合力控制下的多无人轨迹优化
假设在2 000 m×2 000 m的范围内,有16架无人机负载该区域的通信覆盖,300个用户位置随机分布在该区域中。目前在应急通信场景下,多采用无人机均匀分布的形式构成通信网。这里将上述无人机预设的分布模式和本研究提出的无人机轨迹优化方法进行对比。图5左图是本研究的实验结果,图5右图是预设模式结果。通过对比发现,本研究提出的无人机轨迹优化能够根据用户分布特征自动调整位置,实现负载均衡。而在固定位置的无人机通信网络,会出现部分无人机服务用户过多和过少的情况,导致负载不均衡。负载数据如图6所示。从结果中可以看出本文算法优化下无人机的用户分布数量比较均衡。

图5 无人机位置优化仿真实验结果

图6 无人机负载分布结果
在得到无人机优化结果后,验证用户通信质量。根据无人机下行通信系统模型,将通信带宽归一化为1,噪声功率为-101 dBm,无人信号发射功率为30 dbm,(2)中的a=9.6,b=0.28。根据通信模型,在得到无人机和用户的无人机位置后,可以根据(1)~(7)计算出用户的数据传输吞吐量。所有用户的吞吐量累计分布函数(CDF,cumulative distribution function)曲线验证结果如图7所示,从CDF曲线分布可以看出本文算法能够提升用户的吞吐量性能,用户的通信质量普遍高于对比算法。同时,提高了公平性。

图7 用户吞吐量CDF曲线
5 结束语
通过分析多无人机系统的负载特性以及用户分布对通信性能的影响,设计了无人机轨迹优化模型,提出了基于用户位置的虚拟力场和基于无人机负载的虚拟力场,并围绕这两种虚拟力场,进一步提出了无人机轨迹控制方法。
从仿真实验可以看出所设计虚拟力场和无人机轨迹控制过程的合理性。下一步将研究智能型更高的无人机轨迹控制优化方法,拟采用人工智能手段进一步提升轨迹优化性能。
