基于润湿过渡的玻璃表面亲水微结构的理论设计与制造
2021-08-03杨亮王志兴王琦
杨亮,王志兴,王琦
(大连交通大学 机械工程学院,辽宁 大连 116028)
固体表面的润湿性对于基础研究和实际应用至关重要。超亲水表面具有自清洁、防雾、提高表面换热效率的特点,作为一种非常特殊的现象而受到了广泛的关注[1-2]。为了获得亲水表面,在表面设计与制造亲水微结构是物理改性技术的主要研究内容,也是表面制造工程领域的研究热点[3]。设计的微观结构是否亲水一直是研究人员主要关注的问题。一般来说,润湿性是说明液体和固体表面之间亲和力程度的性质,而接触角(CA)是使这一概念量化的参数[4]。超亲水表面是指与水接触角小于5°的表面。
一般来说,表面的化学特性决定了表面张力,因此从严格意义上说也就决定了润湿性,而表面粗糙度允许在一定程度上对其进行修改。基于这些前提,提出了几种理论来解释固体表面的润湿性[5]。其中,粗糙表面的理论主要有Cassie- Baxter 状态模型[6]和Wenzel 状态模型[7]。Cassie-Baxter 状态表明材料表面处于高能状态(通常接触角较大)。相反,Wenzel状态通常处于较低的能量和较小的接触角。尽管能量势垒的存在阻止了自发转变,但已经观察到从亚稳Cassie-Baxter 态到稳定Wenzel 态的润湿转变的存在[8-9]。为了诱导从高能态(Cassie-Baxter)到低能态(Wenzel)的转变,必须施加外部刺激[10-12],如液滴的压缩、基片的振动、液体的加热、电场的应用或其他外力,使克服能量障碍和触发润湿过渡成为可能[13-19]。当从Cassie-Baxter 状态过渡到Wenzel 状态时,液滴会填充粗糙表面的气孔,并且观察到的表观接触角会减小。因此,利用C-B 状态转化理论去分析所设计的微结构是否能达到所期望的亲水性能,必定是一种行之有效的理论方法。
本文设计了一种基于生物模拟结构的超亲水蜂窝结构,利用润湿过渡理论对结构的亲水性进行了分析,给出了接触角的理论预测值。最后,利用激光加工技术在玻璃表面制造结构,测量实际接触角,并与理论预测值进行比较。
1 微蜂窝亲水性结构的设计
功能结构设计的灵感往往来自大自然。通过对自然生物结构的研究,已创建了具有生物启发性的抗反射、自清洁和减阻特性的表面结构,以及新型的粘合剂系统[20]。刘克松等[21]研究了防雾蚊眼,设计了一种基于六角形结构的人工复合眼结构,具有特殊的润湿性能。受此启发,本节提出了一种基于激光加工的高斯槽微多孔六角形结构,称为微蜂窝结构。
蜂窝孔阵列的设计如图1 所示。其中,P是相邻两个六角孔之间的螺距,L表示六边形结构的长度,b表示壁厚。蜂窝孔侧壁的截面轮廓符合高斯曲线的分布(图2b),即侧壁的形状和结构深度应符合激光加工所能达到的要求。理论上,微孔的二维轮廓可以用高斯函数来描述,如方程(1)所示。

图1 设计的蜂窝结构模型Fig.1 Model of the designed honeycomb structure

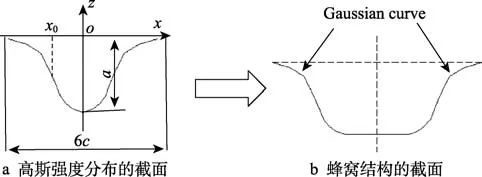
图2 激光束的高斯强度分布和蜂窝结构的截面Fig.2 Gaussian intensity profile of the laser beam (a) and cross-section of honeycomb structure (b)
式中:a是高斯常数;c是标准偏差。在图2a 所示高斯曲线中,–3c和+3c之间的面积比例约为99.7%,因此选择±3c之间的曲线表示脉冲激光加工的高斯孔,参数a在几何上表示高斯孔的深度,6c在几何上表示孔的宽度。
2 微观结构亲水性分析
根据前面文献的分析可以看出,通过分析水滴从Cassie-Baxter 状态到Wenzel 状态转化,可以得到微观结构亲水性的判断。因此,超亲水性研究是分析液/固体从Cassie-Baxter 状态到Wenzel 状态的接触过程。接触角是研究亲水性最常用的参数,因此首先要给出接触角从Cassie-Baxter 状态到Wenzel 状态变化的数学表达式。
图3 给出了相邻蜂窝孔的几何截面。当水滴与微孔表面刚刚发生接触时,水滴处于Cassie-Baxter 状态,其表观接触角θD可以表示为:

图3 相邻蜂窝孔的截面Fig.3 Cross-section of neighbouring honeycomb holes
式中:θA是前进接触角;f1是固液界面投影与蜂窝总投影面积的比;f2是液气界面的投影与蜂窝总投影面积的比。为了确定f1和f2,简化参数解,水滴底部的弧可以看作一条直线(表示为CG)。同时引入两个中间变量1f'和f2',分别表示f1和f2在蜂窝孔界面内的投影线比,并由(DC+ED)/(OA+AF)和(BC+BG)/(OA+AF)给出定义。
为了求DC段的弧长,需要建立一个高斯函数,点C是固液接触区的边界点。选取AF作为x轴,AB作为y轴,在x轴上从C点到A点的距离表示为x0。根据弧长公式可得DC的弧长为:
变量1f'和f2'的表达式为:

本文所设计的蜂窝具有较为复杂的结构,为此选择六分之一的蜂窝结构作为研究对象,其沿图1 黑色箭头方向的投影图如图4 所示。
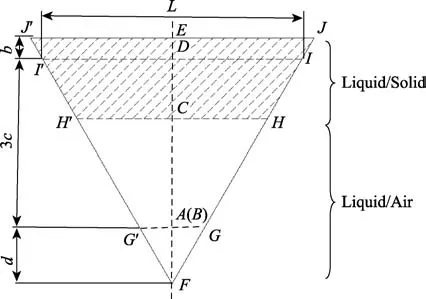
图4 蜂窝的投影视图(蜂窝孔的六分之一)Fig.4 Projection view of the honeycomb (one-sixth of a honeycomb hole)
II′J′J部分的面积表示为SED:

HH′I′I部分的面积是DC的弧长乘以梯形中线的长度,可以表示为SDC:

FHH′部分的面积是三角形的面积,可以表示为SCF:

FJJ′部分的面积是三角形的面积,可以表示为SEF:

最后,f1和f2的表达式为:
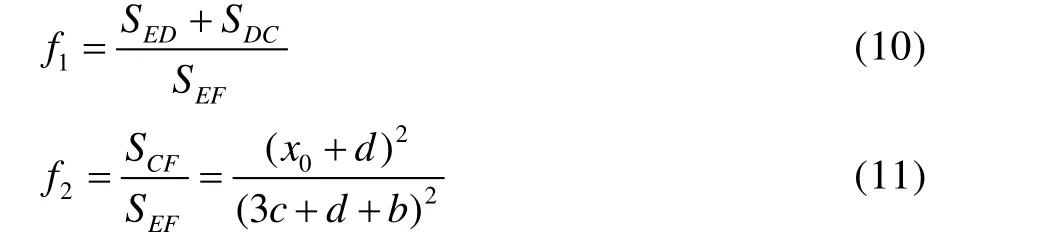
由式(6)—(11)和式(2)即可得到接触角的数学表达。然而,在一般情况下,要实现微结构达到亲水(超亲水)状态,应满足一定的物理约束。图5 显示水滴在玻璃基片表面的接触状态,其中h是水滴在柱间凹陷的高度,θA是基片的前进接触角,R是水滴的半径。假设液滴凹陷的界面是球表面的一部分,r是球半径。根据Hans-Jürgen Butt 等人[22]的研究分析,设计亲水结构中考虑压力的作用,一般有两种机理,一种为基于液体界面的曲率可以达到图形几何设定的值,从而使液体接触衬底,称之为下凹穿刺;另一种是基于液气界面可脱离顶部球体向下移动的原理,称为起(脱)钉穿刺。本文主要是从几何角度建立亲水模型,因此采用第一种理论,液滴的状态由重力(W)和穿刺压力(P)确定。

图5 接触表面的液滴Fig.5 Droplet contacting the surface
为了在基片表面达到亲水状态,必须存在重力大于穿刺压力的条件。每个蜂窝孔的平均液滴质量(m)由公式(12)计算。

穿刺压力(P)满足拉普拉斯关系式,可以通过杨氏方程[23]计算。为了简化计算,将六边形表面视为曲率半径为r的球冠。

式中:lgγ是液体和气体之间的表面张力。根据方程式(12)—(14)和式(8)—(9),可以得到最终的优化边界条件:
利用数值仿真程序进行上述理论的数值模拟,可以获得接触角的理论预测值,其中所使用的基本参数如表1 所示。

表1 优化中使用的参数Tab.1 Parameters used in the optimization
3 试验装置细节
为了验证第2 节理论及其预测值的准确性,需要对所设计的微结构进行加工,并利用检测仪器对加工制造后的微结构表面的亲水角进行测量。本文选择的加工母材为玻璃基片,所设计的微结构选择使用本课题组的一项激光加工专利技术,该技术提供一种激光加工工艺方法,包括设计的一种吸光辅料涂敷技术,能够实现红光纳秒激光的玻璃表面微细加工。具体的试验细节如下所述。
3.1 玻璃基板的预处理和后处理说明
使用玻璃表面微结构激光加工方法。主要思想是利用吸光辅助材料(TiO2)实现玻璃基板表面激光的微烧蚀。试验工件的预处理和后处理如下:
将玻璃显微镜载玻片(类型CAT.No.7101)用清水洗涤,然后在超声清洁机中清洗5 min。干燥后,将TiO2溶液均匀地涂敷在载玻片的表面,置于阴凉干燥的室温下,水平放置48 h。
激光加工后,将样品在超声清洗设备中用去离子水冲洗半小时,以除去表面的熔融物和二氧化钛。然后,将试样分别在丙酮和乙醇中进行30 min 超声洗浴。最后,将这些样品在烤箱中干燥。在测量接触角之前,在样品表面涂覆硅烷试剂(1H, 1H, 2H, 2H Perfluorooctyltriethoxysilane, 97%, Alfa Aesar Ltd),然后在100 ℃真空烘箱中硅烷化12 h,以降低其表面自由能。
3.2 试验装置和表面测量方法
激光加工试验是在图6 所示的混合超精密机床上进行的。该机床配备了纳秒脉冲光纤激光器,其中心发射波长为1064 nm。激光源的平均输出功率为20 W,最大脉冲重复频率为200 kHz。操作过程中,激光束穿过透镜并聚焦在精密X-Y-C载物台上的样品表面。
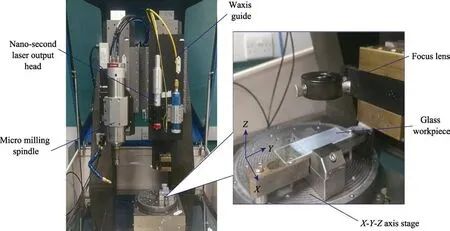
图6 混合超精密激光机和载玻片Fig.6 Hybrid ultraprecision laser machine and glass slide
通过 Mitutoyo 表面粗糙度测量系统(Surftest SV-2000/3000)测量加工过的微结构的二维轮廓。通过Dino-lite 数字显微镜(AM4115TW)测量蜂窝凹槽的形态。通过Zygo 白光干涉仪(OMP-0469F)测量微结构的形态。用Loaw 工业相机(UltraMacro 5X)测量表面上的接触角。所选的水滴量为5 µL。对于每个样品,测量水滴的接触角3 次,并计算平均值。
同时,为了获得试验所得的凹槽尺寸值,首先对激光加工的凹槽的工艺特性进行研究,分别给出a、c的基本尺寸以及与激光特性参数之间的关系。利用该参数作为理论仿真的基础数值。
4 结果与讨论
利用上述激光加工设备对玻璃表面进行加工,图7 给出了蜂窝结构边长为20 μm 的光学显微镜照片(图7a)和白光干涉照片(图7b 和图7c)。可以看出,通过吸光辅助材料的激光烧蚀技术,可以利用纳秒激光器在玻璃表面获得规则的六边形蜂窝结构,其边长尺寸大小可达几十微米甚至更小。
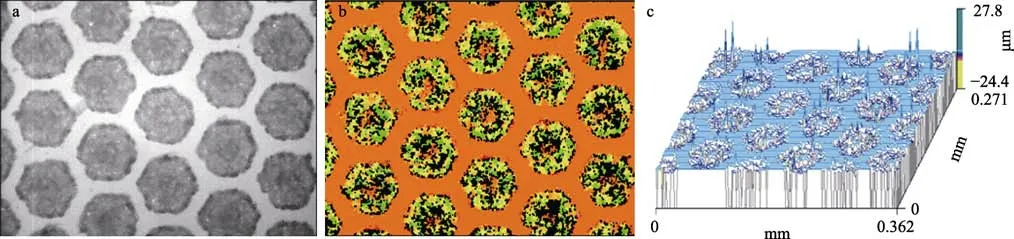
图7 结构的光学显微镜和白光干涉照片Fig.7 Optical microscopy and white light interference photograph of a structure
同时,本文采用静滴法测量蜂窝结构表面水滴的表观接触角,以表征样品表面的亲水性能。其中,侧视图由工业微距镜头相机捕获,接触角由图像处理软件确定。图8 给出了具体测量的表面接触角的照片(铺展时间均在10 s 以内)。
测量结果表明,蜂窝微结构表面的接触角均小于玻璃本身的本征接触角,说明所设计制造的微结构具有较好的亲水性能。同时,由图8 可以看出,随着蜂窝结构边长尺寸的减小,接触角也随之减小。当边长为10 μm 时,接触角达到4.7°(<5°),可知此时的微结构表面已经达到了超亲水的状态。图9 给出了原始表面和超亲水表面的图像。可以看出,在超亲水表面水滴完全散开,处于完全润湿状态。
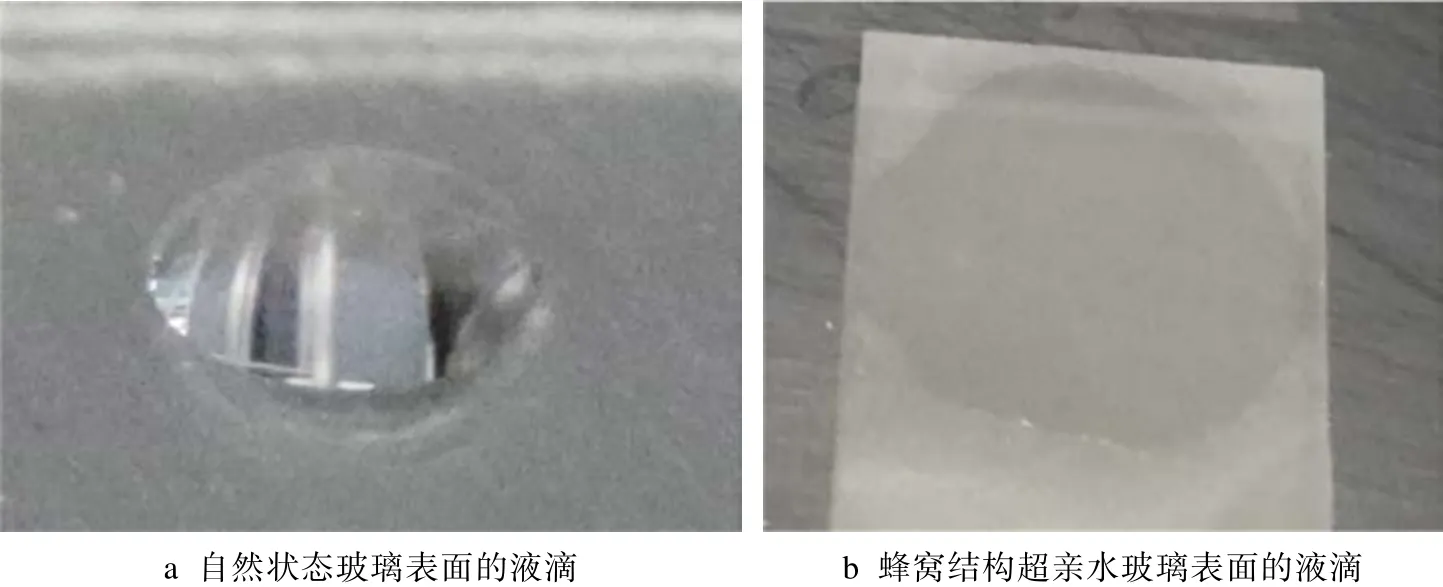
图9 原始表面和超亲水表面的图像Fig.9 Images of the original surface and the super-hydrophilic surface
同时,图8 给出的四种边长条件下的亲水角测量值如表2(第3 列)所示,根据第3 节中的理论公式,计算获得的预测接触角如表2 第2 列。预测值与试验测量值吻合良好,误差值均小于5°,表明本文所建立的理论模型是基本准确可行的。

图8 不同边长的蜂窝结构的接触角Fig.8 Contact angle at different side size

表2 接触角的试验值与预测值的比较Tab.2 Comparison between experimental and predicted values of contact angle
5 结论
1)利用表面润湿过程理论,通过分析材料表面微结构的Cassie-Baxter 态向Wenzel 态转变,给出激光加工蜂窝状微结构的理论模型是合理可行的,可以比较准确地预测微结构的表面亲水性(表观接触角)。
2)采用纳秒激光的吸光材料辅助烧蚀技术,可以成功地对玻璃表面进行微结构加工,精确地制造出微米级的蜂窝结构。
3)基于生物学仿生技术设计的蜂窝微结构,能够起到减小表观接触角的效果。所设计的结构的表面接触角随着蜂窝状结构尺寸的减小而减小。当蜂窝结构的边长约为10 μm 时,可以实现玻璃表面具有超亲水性能。
