矿用机械式挖掘机铲斗的原理设计探讨
2021-07-30廖津民
廖津民
(马来西亚世纪大学(SEGI University),吉隆坡 哥打白沙罗 47810)
近年来,工程机械的发展十分迅速,尤其是我国的大工程项目的不断向前推进,尤其以挖掘机为代表的工程机械的需求量不断增加。需求量不断增加的同时,整体上对高性能高质量的挖掘机的要求也是越来越高。而机械式挖掘机由于其传动性能好、工作效率高,因此被广泛运用,在这个过程中挖掘机工作部分的损耗也是越来越高,尤其是对土壤、砂石等直接接触的铲斗损害更高。因此基于这个大环境下,设计出对于环境适应性更好的挖掘机铲斗将成为挖掘机发展的新方向。因此本文将主要对矿用机械式挖掘机的铲斗进行设计,通过对其原理进行分析,通过对其结构设计以及整体性能的设计,从而设计出对环境适应性更好的新型铲斗,从而可以为今后的工程机械的发展提供方向。
1 矿用机械铲斗的结构设计
1.1 矿用机械铲斗目前存在的问题
对于矿用机械铲斗来说,目前遇到的问题主要有以下几点。
(1)铲斗斗齿的强度硬度与环境的适应性较差。在对许多的铲斗使用问题的调查中发现,目前的突出问题就是铲斗斗齿的强度硬度不够,在很多时候存在硬度较差从而造成铲斗斗齿的崩齿现象。在一些恶劣的条件下,还会产生斗齿的齿根断裂现象,这些的铲斗斗齿在面对复杂多变的环境过程中出现的适应性较差,从而产生的对齿根的破坏现象。
(2)铲斗斗齿所受的阻力大,满载系数低。铲斗在进行工作的过程中,由于受到铲载物的影响,会给铲斗一个相互作用的力,在这个过程中往往受到的阻力较大,这样就会造成很大的困扰,满载系数低,这个满载系数低就是由于铲斗斗齿在相互作用的过程中受到的阻力较大,无法真正的达到装载的过程中实现满载。如图1所示。

图1 铲斗斗齿工作示意图
(3)铲斗的疲劳寿命较低,磨损严重。铲斗另一个遭受到损害是由于斗齿的磨损现象严重,由于铲斗一直在进行工作,在工作的过程中斗齿受到的冲击是十分巨大的,最根本的还是齿的磨损,我们都知道斗齿是铲斗进行工作的关键部位,一旦齿磨损后,整个的铲斗就会失去原有的作用,这样就会产生一系列的问题,降低机械式挖掘机铲斗的工作效率,甚至会出现崩齿的现象。
1.2 铲斗的结构设计
铲斗斗体的设计是整个铲斗设计的核心部分,对于斗体的设计首先要考虑的是减轻挖掘时的阻力,在这个过程中,要考虑到材质、形状、屈服强度等多种指标,形状大多数的铲斗都是一样的,这种形状既可以实现最大范围的铲土,又可以尽可能地减小在铲的过程中的阻力。而铲斗的前齿要对物料进行铲削等动作。因此,在这个过程中要考虑的一个重要因素就是斗唇与斗前臂的倾角,也就是前倾角,对于倾角的选择还是考虑以降低磨损为主,选择一个合适的前倾角可以极大的降低斗齿的磨损程度,并且在这个过程中还会产生较大的冲击力,并且在这个过程中要重点考虑铲斗铲物料的偏心现象,如图2所示。从图二中可以看出,整个铲斗的偏心现象是根据铲斗的总的长度以及铲斗各个气缸之间的中心距离等有关,以及铲斗斗齿与气缸之间的高度有关。

图2 铲斗的偏心现象
铲斗的斗底来说,斗底要平滑过渡,为什么要将铲斗的斗底设计成平滑过渡的呢,这是因为,铲斗在铲物料的过程中需要暂时存储,在这个过程中如果不能及时有效地将物料保存就会造成大量的物料泄漏现象,如果将铲斗的斗底设计成平滑过渡的,就可以将物料尽量地向铲斗的中心滑动,整个范围的物料就完全包围在铲斗的斗底底部,这样也会释放压力。另外,斗底设计成平滑过渡的还会提升整个斗底的刚度,刚度越大,整个铲斗的铲削所受的力也会变大。
2 机械式挖掘机铲斗有限元分析与智能设计
2.1 机械式挖掘机铲斗有限元分析
由于铲斗并不是独立进行工作的,它是由动臂以及斗杆的共同作用下进行工作,因此,在对挖掘机铲斗进行有限元分析的过程中,要考虑到动臂以及斗杆的共同作用,只有这样,才能真正地将仿真分析得更加合理有效。
臂和铲斗的铰接点处的曲线a,b,c和d定义为变量。使用Pro/MECHANIC模块下的参数化功能将4个变量生成的aa1、bb1、cc1和dd1。根据动臂的实际情况进行变量设置,并使整个的变量的变化范围为±30mm。
在对动臂的设计进行优化时,不仅要考虑减小应力值,而且还要考虑动臂的最小尺寸,以达到满足使用要求和减小动臂尺寸的目的。动臂,因此要承受应力。最小值和尺寸是动臂最佳设计的目标函数。
并且动臂处于提升位置时优化设计。为了减少动臂的质量和动臂最大危险位置的应力值,软件会建立5或者6个约束条件:通过ANSYS模块中的优化分析设计模块,并根据优化约束条件设置经过25次迭代和敏感性分析后,经过迭代计算,悬臂应力云图的优化结果如图3所示。
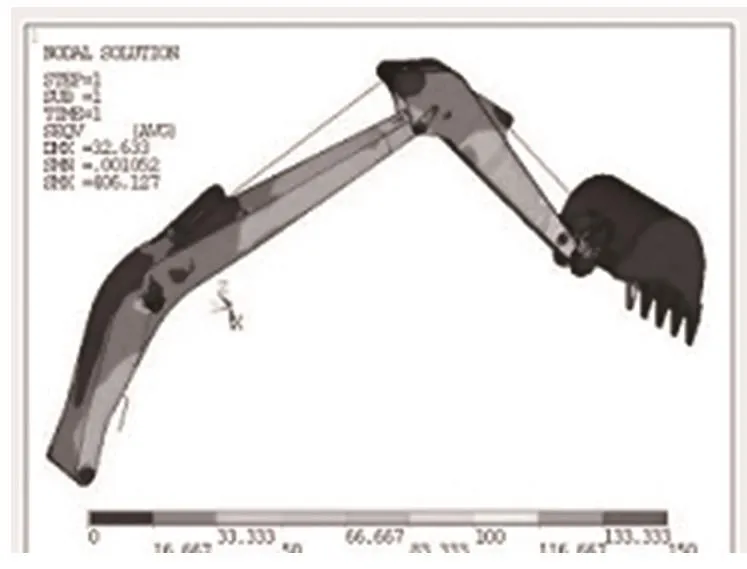
图3 铲斗有限元分析云图
根据图3的云图可以看出,当悬臂上的力保持不变时,悬臂的最大作用力位置不变,但最大值减小到200MPa作用,并且悬臂和悬臂之间的铰接点处的应力也减小了。以其中一条曲线为例,优化前后的应力曲线如图3所示。优化前后的6个变量的大小变化如表所示。从图中可以看出,优化后变量的大小显著减小,这不仅减轻了动臂的重量,而且节省了材料。
该研究对象使用ansys软件中的优化分析模块分析动臂的应力,并获得铲土位置处动臂的应力变化规律,并在此基础上,确定优化参数,确定动臂的应力。约束和目标函数进行了优化。仿真结果表明,该方法的优化效果明显,为进一步提高装载机工作装置的设计质量提供了一种简单快捷的设计方法。
2.2 铲斗的智能设计
当前的铲斗的操作比较复杂多变,往往完成一项任务就需要铲斗几十个动作,而这些动作的产生大多数是需要通过人工操作来完成,由于人工操作掌握的精度是十分有限的,为了追求高精度就需要进行铲斗的智能设计。本文进行的智能设计主要是在工作装置部分装加监测控制装置,也就是如果铲斗在工作的过程中出现偏离或者整个的工作出现纰漏的时候可以及时地发现调整,这样借助这种智能化的结构可以很好的提升容错率,也可以提高工作时铲斗的精度,目前市面上已经逐步设计出实时监测与实时分析联合作业的综合设计。这样极大地提高了机械式铲斗精度低、犯错率高等缺点,这样就可以很好地完成铲斗的各个动作。但是目前由于智能化程度较低,对于实现更高水平需要的可靠性分析还不成熟不完善。因此,要想真正地对铲斗进行智能设计就需要将科技与专用的技术共同进步,只有这样,才能让机械式铲斗高质量、高速度发展。
3 结语
综上所述,本文通过介绍机械式挖掘机铲斗的突出问题,铲斗斗齿的强度硬度不够,在很多时候存在硬度较差从而造成铲斗斗齿的崩齿现象以及铲斗一直在工作,在工作过程中,斗齿受到的冲击是十分巨大的,最根本的还是齿的磨损现象严重。通过对这些突出问题分析后,对机械式铲斗的结构进行设计尤其是对核心结构斗体的设计,然后,对铲斗以及传动部分整体进行有限元分析,从而为将来的智能设计提供帮助。
