智能识别送货机器人
2021-07-29湖北经济学院信息与通信工程学院杨小龙孙少聪柳超凡罗晶凡
湖北经济学院信息与通信工程学院 杨小龙 唐 傲 孙少聪 柳超凡 余 鹏 张 澳 罗晶凡 余 祥
结合2020年新冠状病毒传染病的流行,医院很多医护人员需要接触和配送药品与生活物资,这样增加了医护人员的传染几率,为了避免让人直接接触传染源,本项目采用STM32单片机实现智能识别的配送小车,该小车的主要目的是代替人工完成一些带有危险性的配送,例如送药,送物资进诊室等等,本小车可以实现智能识别,识别物品的特征,并与目的地的特征对号入座,可以改变输送的方式,应用于更多的领域和范围,前景广阔。
1 课题简介
2020年,湖北武汉发生重大疫情,一时间官方紧急封城,各地的医护人员驰援武汉,一方有难,八方支援,在抗疫一线与病毒做着顽强的斗争,与此同时,他们的家人,各地的人民,最担心的就是他们自身的健康和是否会感染新冠疫情,本项目旨在最低限度的减少医护人员这些一线奋斗的抗疫战士的感染率,让他们可以做到智能操控小车完成送药,送物资的活动,最大可能避免直接性接触,从而让医护人员的安全得到进一步的保障。在课题后期研究当中期望加入智能化控制以及全景设备,使系统具有更高的智能性和更全面的信息采集,从而实现对人力资源的大幅度节约,让疫情发生后的损失更为减少,为医护安全提供进一步的保障。
2 系统方案设计
本系统单片机由STM32单片机设计,硬件方面由驱动控制,WiFi遥控,OpenMV摄像头,以及舵机构成的机械臂模块配合使用实现系统功能,软件方面利用了PID控制技术来实现机械臂的自由旋转以及识别到目标后的下一步动作。同时加的WiFi技术实现超远距离遥控,实现在2000m以内可以任意指挥智能车的行动,保持智能车的稳定性和可控性。
2.1 系统简介
智能送货机器人系统由驱动控制模块,WiFi遥控模块,OpenMV视觉处理模块,以及舵机构成的机械臂模块四部分构成,搭配外扩控制以及电源管理,实现小车的精确控制。系统流程框图如图1所示。
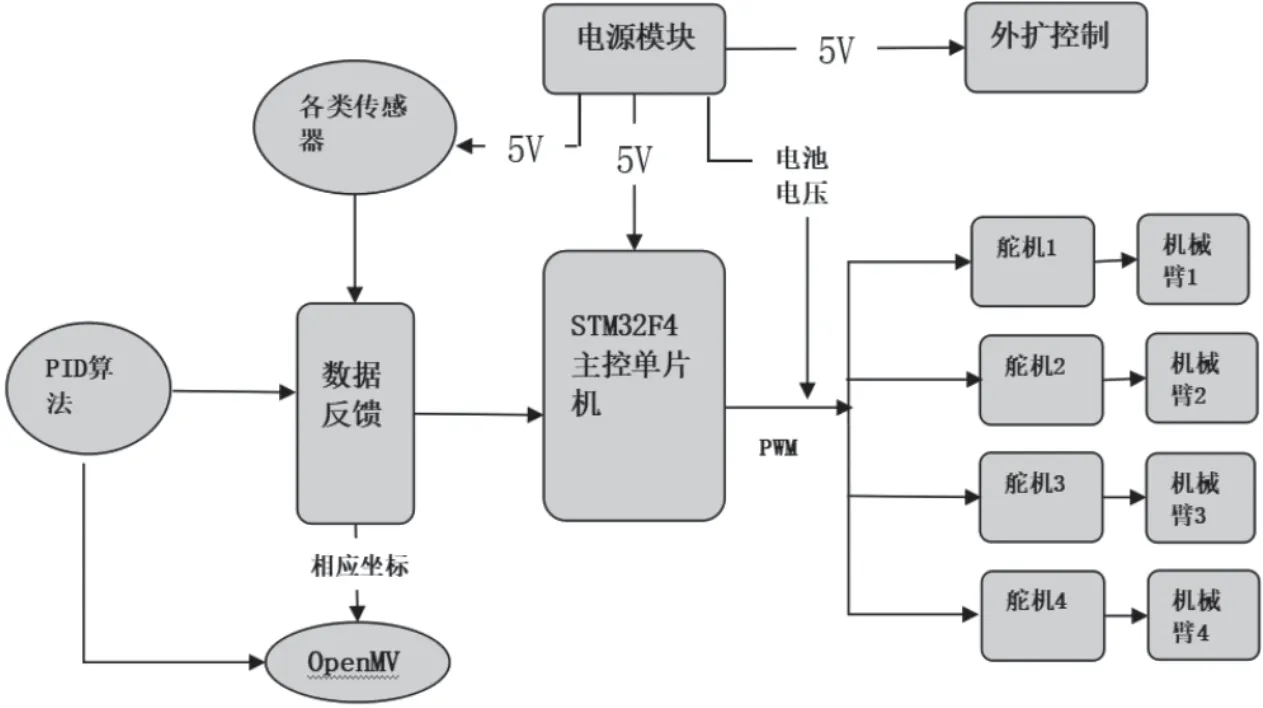
图1 系统流程框图
2.2 器件的选型与比较
主控单片机选型:
系统单片机采用STM32F407V型号开发板,此开发板的优势在于采用Cortex M4内核,带FPU和DSP指令集,运行速度高速;STM32F4系列拥有192KB的片内SRAM,集摄像头接口(DCMI)、加密处理器(CRYP)、USB高速OTG、真随机数发生器、OTP存储器为一体,并且STM32F4具有更低的ADC/DAC工作电压、更快的D/A速度、更低的ADC/DAC工作电压、32位的定时器、带日历功能的实时时钟(RTC)、IO口的复用功能也大大提升以及更快的USART和SPI通信速度,与此同时STM32F4最高运行频率可达168Mhz,对于我们设计飞控更是绰绰有余,所以我们选择F4系列作为主控,一是利用我们本身对STM系列有学习基础,其二在于性能各方面指标能够完美契合项目要求。
舵机的选型:
舵机有内置的控制电路,它们的尺寸虽然很小,但输出力够大。像Futaba S-148这样的标准舵机能提供0.3N·m的扭矩,相对于它的外形大小来说这已经足够强大了。同时,舵机消耗的能量与机械负荷成正比。因此,一个轻载的舵机系统不会消耗太多的能量。考虑到本项目需要提起物资等生活必需品,我们选择了S-148型舵机。
WiFi模块的选型:
ESP8266是由乐鑫公司出品的一款物联网芯片,价格较低,性能稳定。该芯片有三种工作模式,以AT指令进行操控。鉴于我们在学校中就利用ESP8266进行过项目学习以及实地并不需要太远的操控距离,所以我们选择了ESP8266WiFi模块。
摄像头模块选型:
视觉处理主要使用OpenMV实现,OpenMV是一个开源可编程摄像头模块,利用MicroPython语言,而且摄像头本身内置STM32H7芯片,方便我们进行编程和学习,从而更好地实现目标的确定识别。视觉处理模块的用途主要用于对医院视野的掌握和病房门牌号的识别,搭配定点模块实现对视野大范围的把控,对目标物能有一个迅速的识别。
3 智能送货机器人系统的软、硬件设计
3.1 软件程序设计
(1)软件程序设计流程(图2)
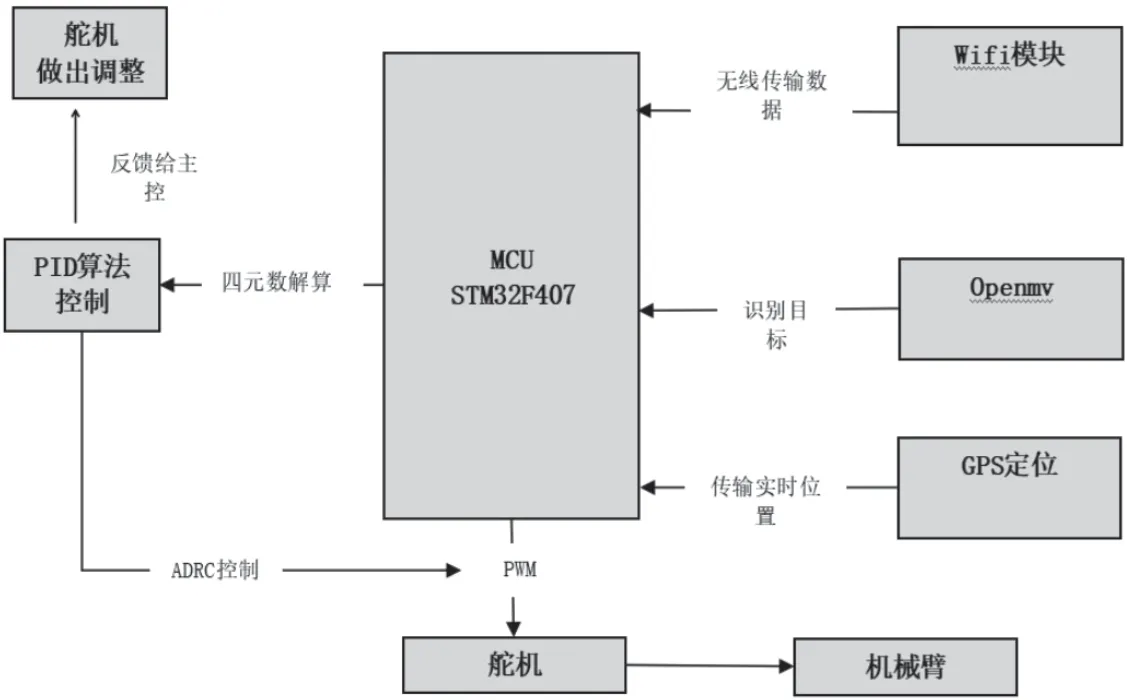
图2 程序流程框图
3.2 硬件电路设计
舵机控制原理:
舵机控制模块是控制系统的关键因素。通过PID算法传回的数据,它在每个控制周期内解析数据并对OpenMV传回的姿态信息进行实时反馈,得到小车的位置信息和工作状态,计算出控制量,从而控制驱动四个舵机工作,保持小车稳定正确前进。
电源管理:
电源由一块12.3~13.8V的航模电池提供,给四个舵机供电,实现四个方向自由度的自由转变,同时满足实时小车状态的调整以及对小车工作时长的长待机功能。
4 系统调试、测试结果及分析
4.1 系统调试结果
系统调试完成后,每个方向的舵机能完成360°自由度的翻转和抓取动作,摄像仪模块能够通过OpenMV传回视觉数据,实时反馈所看到的景象以及识别到目标物体,做出反应动作,送出所需的货物以及对上位机进行反馈,让使用者了解到现在的送货情况,系统调试完成无误。
4.2 测试结果
经过程序编写和调试之后我们对摄像头的数据结果进行了分析与纠正,OpenMV可以正常的识别目标物体,实验中用蓝色门牌作为标志进行目标识别,结果发现OpenMV摄像头能够准确的捕捉到目标物体。OpenMV视觉处理模块数据如图3所示。
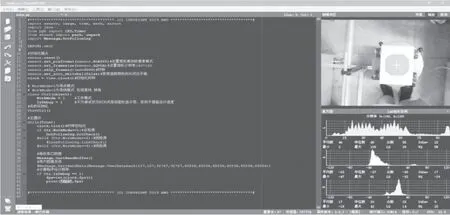
图3 OpenMV视觉处理模块数据图
4.3 结论
项目测试结果基本符合我们的预期,我们也期望在后期的学习研究中对系统进行进一步的完善。后期我们拟在机器人上加入一个人机交互设备,让机器人在进入病房的时候,病人有需要的话对摄像头直接喊话以及按机器人上的按键,告知医护人员自己现在所遇到的问题,及时让医护人员收到病人的消息以及出现的问题。为处理事务提供便捷。一方面既能提供安全系数,另一方面能够将智能化的优势最大化,让医院和病人都能享受到二十一世纪高科技时代的便利,推动信息化时代的发展。
