电磁曲射炮控制与弹道分析系统模拟
2021-07-28梁明智

摘 要:电磁炮是一种利用电磁能量对弹丸进行加速赋能的武器装置。相较于常见的火药武器,电磁炮的杀伤性更强,打击范围更广。该模拟电磁曲射炮装置是以基于ARM Cortex-M4内核的MK66芯片为主处理器,由摄像头模块与激光模块定位后通过激光精准测量目标位置,得到所需的仰角与初速度。经由DAC控制继电器通断以控制电容充放电的方式控制电磁炮发射速度,同时运用PID控制技术控制舵机角度,实现电磁炮装置的精准制导。
关键词:高压电容;自动瞄准;电磁力;摄像头定位;继电器
中图分类号:TP368.1 文献标识码:A 文章编号:2096-4706(2021)02-0038-03
Abstract:Electromagnetic gun is a kind of weapon device that uses electromagnetic energy to accelerate the energy of projectile. Compared to conventional gunpowder weapons,electromagnetic guns are more lethal and can strike over a wider area. The simulated electromagnetic curved gun is based on the MK66 chip based on ARM Cortex-M4 core. After positioning by camera module and laser module,the target position is accurately measured by laser,and the required elevation and initial speed are obtained. The firing speed of the electromagnetic gun is controlled by the way of capacitor charge and discharge by DAC control relay on and off,and the steering angle is controlled by the PID control technology to realize the precise guidance of the electromagnetic gun device.
Keywords:high voltage capacitor;automatic aiming;electromagnetic force;camera positioning;relay
0 引 言
傳统武器一般都是利用爆炸产生的巨大压强将弹丸弹出,但爆炸所产生的动能有限,且能量的转化率也相对比较低,因此弹丸的最大击打距离也受到极大的限制,为了突破这一限制,电磁炮应运而生,亟需研究自动控制系统操纵电磁炮的重要性不言而喻[1,2]。
本研究做到自主识别目标并对其进行追踪监视,应用PID调节双舵机云台以控制电磁炮的方向,微调角度实现精准打击。
本文主要以下面的条件和目标为标准制作并测试该系统:将电磁炮系统安装在固定发射点处,将炮管的初始状态调整为水平方向与目标的连线夹角为0°、垂直方向与地面平行。将目标靶水平置于地面,靶子中心与固定发射点间的距离控制在200 cm≤d≤300 cm,与炮筒延长线夹角满足a≤30°。
目标一:输入电磁炮所要击打的目标的距离d以及目标与炮筒延长线的夹角a,通过按键启动系统后,电磁炮自动瞄准射击。
目标二:将目标靶子放置在距离电磁炮200~300 cm的范围内,与炮筒的夹角不作要求,要求通过按键启动系统后,炮筒在水平方向反复摆动的过程中,系统能够在自动搜寻并锁定目标后发射弹丸命中目标靶子。
1 系统总体结构
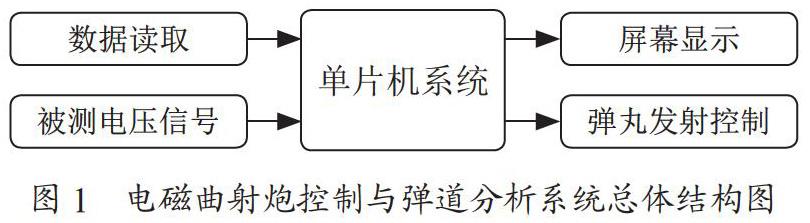
电磁曲射炮控制与弹道分析系统总体结构如图1所示,主要包括四个部分:
(1)数据获取。单片机通过键盘输入位置数据或通过OpenMV摄像头模块捕获目标,获取目标与中心轴线的偏离角,由TFmini激光测距模块精准测量与目标点的距离,获得舵机的目标角度。
(2)被测电压信号。通过ZVS升压电路对电容进行充电,对电容进行分压测得电容实际电压,反馈至mcu进行判断与处理。
(3)TFT显示。显示当前工作的模式、目标角度、距离等信息,配合矩阵键盘提供较好的菜单式人机交互界面。
(4)弹丸发射控制。利用可控硅的开关特性,由MCU发出控制信号,释放电容电压,使线圈通电生成电磁场,完成铁质弹丸加速发射等过程。
1.1 图像系统方案选择
方案一:使用MT9V034摄像头模块。MT9V034摄像头为灰度摄像头,而靶标为红色,与其他深颜色的物体区别度不高,会降低系统的鲁棒性。
方案二:使用OV7725摄像头模块。虽然OV7725为彩色摄像头,但因为彩图的数据较为复杂,对单片机的处理速度要求极高,所以并不适合在外接较多模块的情况下使用。
方案三:使用OpenMVRT摄像头模块。OpenMVRT摄像头模块是集成在RT1062单片机上的摄像头模块,并且已经具有了较为完善的库函数,在实现各种特定识别功能时容易上手,能较好地识别靶标。
综合以上三种方案,选择方案三。
1.2 控制方案选择
方案一:单独控制舵机垂直仰角控制射程,射程控制范围较小,难以微调距离。
方案二:同时控制舵机垂直仰角和炮弹初速度,控制范围较大,且二者能够搭配使用。
综合以上两种方案,选择方案二。
2 系统理论分析和计算
2.1 数据分析
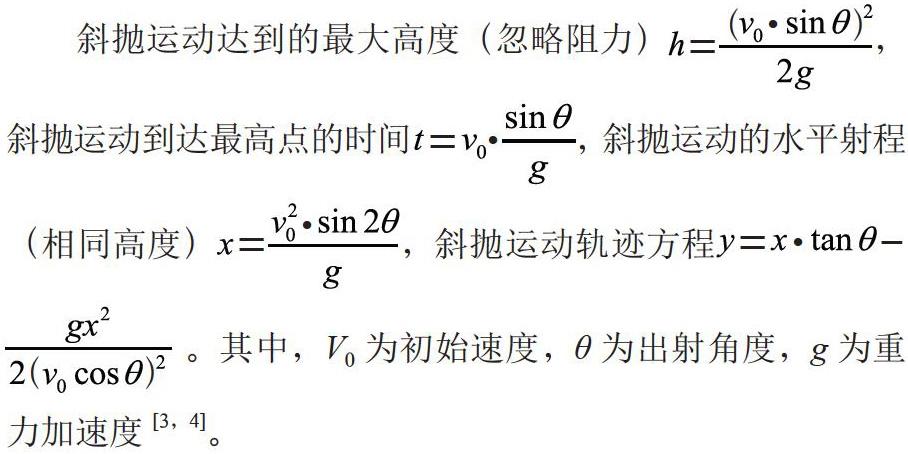
斜抛运动达到的最大高度(忽略阻力),斜抛运动到达最高点的时间,斜抛运动的水平射程(相同高度),斜抛运动轨迹方程 。其中,V0为初始速度,θ为出射角度,g为重力加速度[3,4]。
由于实际发射过程中存在阻力等难以计算的因素,且舵机角度定位存在一定误差,单纯通过计算结果而进行相应控制的效果并不好,所以我们选择在数据计算基础上进行一定范围的修正,做出适当调节以保证炮弹落点的准确性。
2.2 角度和距离的测量
固定摄像头使之与炮筒角度一致,保证摄像头中心与炮筒中心在同一水平面上,通过PID调节达到快速精准瞄准。由于单目摄像头不能精确定位,所以我们通过激光测距模块TFminiPLUS精确地测量模块距导引靶的距离,然后计算出炮管距目标靶的精确距离,再通过该距离调节垂直角度和炮弹初速度。
2.3 舵机云台旋转角控制
通过摄像头得到的引导标识位置,计算其在X轴方向上与图像中心点的偏差。由于摄像头在安装时与电磁炮的炮管平行,即得到了引导标识与炮管指向方向在X方向上的偏差。之后将该偏差作为舵机控制的输入,对舵机进行PID控制使得炮管始终指向引导标识,从而保证炮弹的发射方向便是环形靶所在方向。
2.4 摄像头识别瞄准
通过OpenMV识别红色引导标志,通过UART输出标志的二维坐标与图像中心点二维坐标的差。主控单片机分别将两个方向的偏差投入PID控制系统,PID控制系统的输出给云台的两个舵机。直到引导标志的中心点与图像中心点完全重合,误差为零,PID控制器停止调节,即为瞄准,预备开炮。
2.5 电磁能量的计算
自行绕制线圈首先初步确定总匝数和线圈长度,将参数输入电磁炮计算器,通过输入线圈总匝数40匝、线径0.8 mm、炮管外径17 mm、线圈长度60 cm、铜的密度8.96 g/cm3和导电率1.7×10-8 Ω·m,可以得出缠绕的线圈的电感值和其他参数,并通过模拟器仿真可以调整线圈参数,以此调整弹丸出射速度和出射动能[5,6]。
3 系统硬件设计
硬件系统主要包括两部分:
(1)升压子系统,如图2所示,其为ZVS升压电路,也称“零电压开关电路”。它比普通开关电源能效高,在高频作用下,能大大降低开关电压的损耗,提高电源效率[7,8],可使一般的小功率软开关电源效率提高到80%~85%。
(2)高压电容放电子系统,如图3所示。
4 嵌入式软件设计
软件部分主要实现舵机控制,摄像头和激光测距模块信息采集、图像处理、屏幕显示、键盘调参、切换模式、一键启动等功能:
(1)舵机控制。启动后输入目标舵机打角实现精确调节;
(2)摄像头、激光模块部分。摄像头和激光模块通过串口读取需要的数据;
(3)图像处理部分。识别红色色块并回传色块中心坐标;
(4)屏幕显示部分。显示当前模式编号、设定角度、距离等;
(5)键盘部分。利用4×4矩陣键盘实现模式切换、键盘调参、一键启动等功能。程序开始初始化单片机所需的各个模块,激光、摄像头等开始工作、舵机打角至仰角和水平角度为0。接下来通过按键切换至输入参数模式,等待参数输入完成后充能。舵机水平摇摆直到锁定目标,发射弹丸。图4为本系统的主程序流程图。
5 系统测试与分析
5.1 测试方案
按照设计目标设计测试方案如下:
(1)电磁炮打击指定距离目标。输入目标距离,判断实际落点是否满足目标距离,测试电磁炮弹道的稳定性;
(2)电磁炮向指定角度和指定距离发射测试。通过键盘输入角度和距离,使电磁炮旋转到指定角度后发射;
(3)电磁炮自动寻找引导标识发射测试。在-30°到30°的角度范围内,放置引导标识,距离在2 m到3 m之间。电磁炮启动后自动寻找引导标识,根据引导标识的位置向环形靶射击。测试电磁炮的自瞄系统和测距效果。
5.2 测试结果
共进行了8次测试,测试结果如表1所示。
5.3 系统分析
根据上述测试,得到了该电磁炮系统在三种测试方案下炮弹落点与中心轴线的角度和与定标点距离的多组数据,由此可以得出以下结论:
(1)对于固定距离射击,炮弹落点基本在靶标8环内,最大偏差不会超过15 cm;
(2)对于固定角度,固定距离射击,云台角度偏差在±1°内,炮弹落点基本在靶标8环内,最大偏差不会超过15 cm;
(3)对于自动寻找引导标识射击,该电磁炮系统每次均能较好的识别并指向引导标识。炮弹落点基本在靶标7环内,最大偏差不会超过20 cm。
综上所述,本设计达到了设计要求。
6 结 论
本系统采用摄像头和测距模块相结合的方式实现了目标的精准定位,能够在指定的区域内自主搜索目标,并根据距离自动调节角度,实现精确的打击。通过线圈与升压模块的组合模拟了军用电磁炮的原理,实现了比较精准的炮弹制导,对于武器用电磁炮的设计有一定的指导意义。
参考文献:
[1] 胡德志,李海军,王玉鑫,等.三级同轴线圈电磁炮模型的设计与制作 [J].华北科技学院学报,2010,7(1):85-87.
[2] 王德满,谢慧才,刘亮,等.线圈炮(电磁同轴发射器)综述 [J].西安电子科技大学学报,1992(3):113-121.
[3] 童诗白,华成英.模拟电子技术基础 [M].北京:高等教育出版社,2001.
[4] 阎石.数字电子技术基础 [M].北京:高等教育出版社,1998.
[5] 黄子帆,潘爱琼,郑喜贵,等.一种同轴线圈——轨道复合型电磁炮 [J].信息通信,2016(6):112-113.
[6] 雷雨.火箭电磁线圈弹射器的分析与设计 [D].南京:南京理工大学,2011.
[7] 刘彦鹏,杨丽佳,刘振祥,等.轨道-线圈复合型电磁炮交叉作用研究 [J].国防科技大学学报,2009,31(5):70-74.
[8] 李阳,秦涛,朱捷,等.电磁轨道炮发展趋势及其关键控制技术 [J].现代防御技术,2019(4):19-23.
作者简介:梁明智(1999—),男,汉族,山东郓城人,本科在读,研究方向:电子信息工程。
