基于均值漂移理论的机动单目标跟踪方法研究
2021-07-28张乐赵心宇
张乐 赵心宇

DOI:10.16660/j.cnki.1674-098X.2101-5640-2287
摘 要:针对复杂背景条件下机动单目标跟踪问题进行了研究,首先在初始帧采用交互方式,目标搜索,选定待跟踪目标,然后应用漂移理论方法,对机动单目标进行有效跟踪。仿真结果表明,使用漂移方法可以实现对范围内的机动单目标进行后续帧序列中的目标行进方向预测和跟踪,弥补了传统跟踪算法的短板、保留了均值漂移算法的低计算复杂度和实时性。
关键词:机动目标 均值漂移 目标跟踪 图像预理
中图分类号:TP391.41 文献标识码:A 文章编号:1674-098X(2021)03(c)-0032-04
Maneuvering Single Target Tracking Method Based on Mean-shift Theory
ZHANG Le ZHAO Xinyu
(School of Equipment Engineering, Shenyang Ligong University, Shenyang, Liaoning Province, 110168 China)
Abstract: In this paper, the problem of maneuvering single target tracking in complex background is studied. Firstly, in the initial frame, the interaction mode is used to search the target and select the target to be tracked. Then, the drift theory is applied to track the maneuvering single target effectively. The simulation results show that the drift method can predict and track the moving direction of the maneuvering single target in the following frame sequence, which makes up for the shortcomings of the traditional tracking algorithm and retains the low computational complexity and real-time performance of the mean shift algorithm.
Key Words: Maneuvering target; Mean shift; Target tracking; Image processing
目標跟踪这一技术根据目前的信息科技发展来看仍然具有重要的研究价值和发展前景,日程生活中其应用主要有人机交互、智能机器人、交通监控和军事领域等,应用范围也十分广泛。军事领域中对于雷达、电视制导导弹等信息化武器的应用,目标追踪更是研究的重中之重。工业生产方面对于实现车间自动化生产,目标追踪也起到一定的效果。
1 机动单目标跟踪方法分析
目标跟踪是一个庞大的工程,大体可分为信息处理、目标检测、目标跟踪等环节,具体囊括特征提取、角点检测、计算目标位置等步骤[1]。工程中最重要的两个环节便是对目标进行检测和跟踪的部分。基于均值漂移的目标跟踪算法由于其实时性较好、运算稳定性高和设计简便的特点,成为了这几年国内外目标跟踪方面专家学者重点研究对象[2],基于此算法也衍生了不同类型的改进算法。基于均值漂移的动态目标跟踪算法实际上是一种对密度梯度进行下降优化处理的算法,该算法能够通过快速迭代运算将目标函数收敛到极大指点,从而实现直接对目标进行跟踪[3]。漂移理论的目的就是为了分析概率密度,找出其极大指点,并且要求其中所使用的核函数应当能够进行微分运算。接下来引入核函数和核密度估计来作为第三章均值漂移理论的基础。
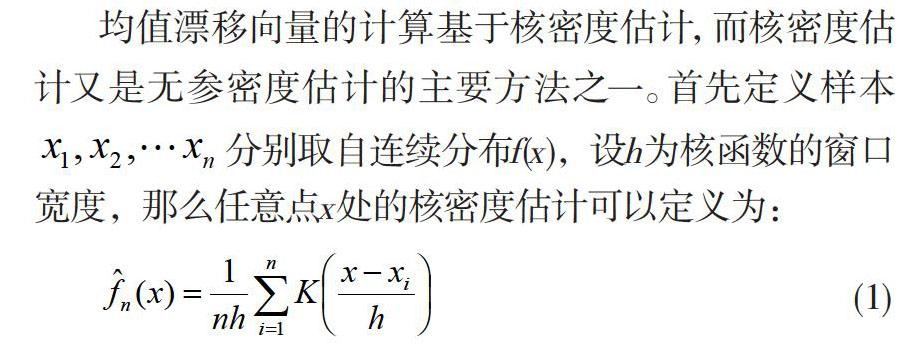
均值漂移向量的计算基于核密度估计,而核密度估计又是无参密度估计的主要方法之一。首先定义样本分别取自连续分布f(x),设h为核函数的窗口宽度,那么任意点x处的核密度估计可以定义为:
式(1)中,K(·)被称为核函数,若要确保作为概率密度函数是有意义的,那么就要确保三点:函数值必须恒大于零、函数可积分并且其积分值为1、函数呈对称分布。一般情况下,核函数K(x)只要是正常的分布函数就能够满足上述三点。即使是不同形状的有较大差异的核函数也都具有满足密度估计的普遍性,主要是由于其估计结果基本上不受函数外型的影响。函数模型的光滑程度很大情况下与带宽大小相联系,带宽不同会导致函数光滑度产生差别,从而间接影响估计量。可以定义,当hn非常大时,x点处概率密度会产生很大的波动。该分布采用了归一化的表现形式,即:
因为样本中无论距离xi 的多远点也有自身对应的贡献量,所以靠近的点会受远离的点影响导致其占比变低,权重自然也会随着降低,而远处点相对于近处点的相对权重也会降低,在这种情况下,是由n个函数叠加,各函数的幅度变化相对较小,那么相加后的函数变化也不大,所以会相对平滑;另外一种情况是,当hn很小时,分担Vn的相对应的点数也很少,所以距离不同,权重也就会不同。在这时就是n个以样本点为中心的尖脉冲的叠加,可以将它看作一个噪声叠加的估计。在多维的情况下,则有:
2 均值漂移在机动单目标中的应用
2.1 建立目标模型
建立目标模型的基本依据就是离散概率密度函数,这个函数是通过统计感兴趣范围内的图片信息特征来得出的。定义目标范围中心为y0,这个范围内有n个像素点,其中特征值bin的量是m。
2.2 建立候选目标模型
假定候选目标区域中心为y,以表示候选区域中的像素点,对候选目标进行建模。
2.3 计算相似度
相似度函数是一个测量函数,它表示的是给出的图片序列第一张中目标模型和接下来的图片序列中候选模型的匹配度。理想状态下的两模型能够完全匹配,也就是说完美跟踪了目标,那么两者的概率分布就会相同,相似度即为100%。
2.4 机动单目标跟踪算法步骤
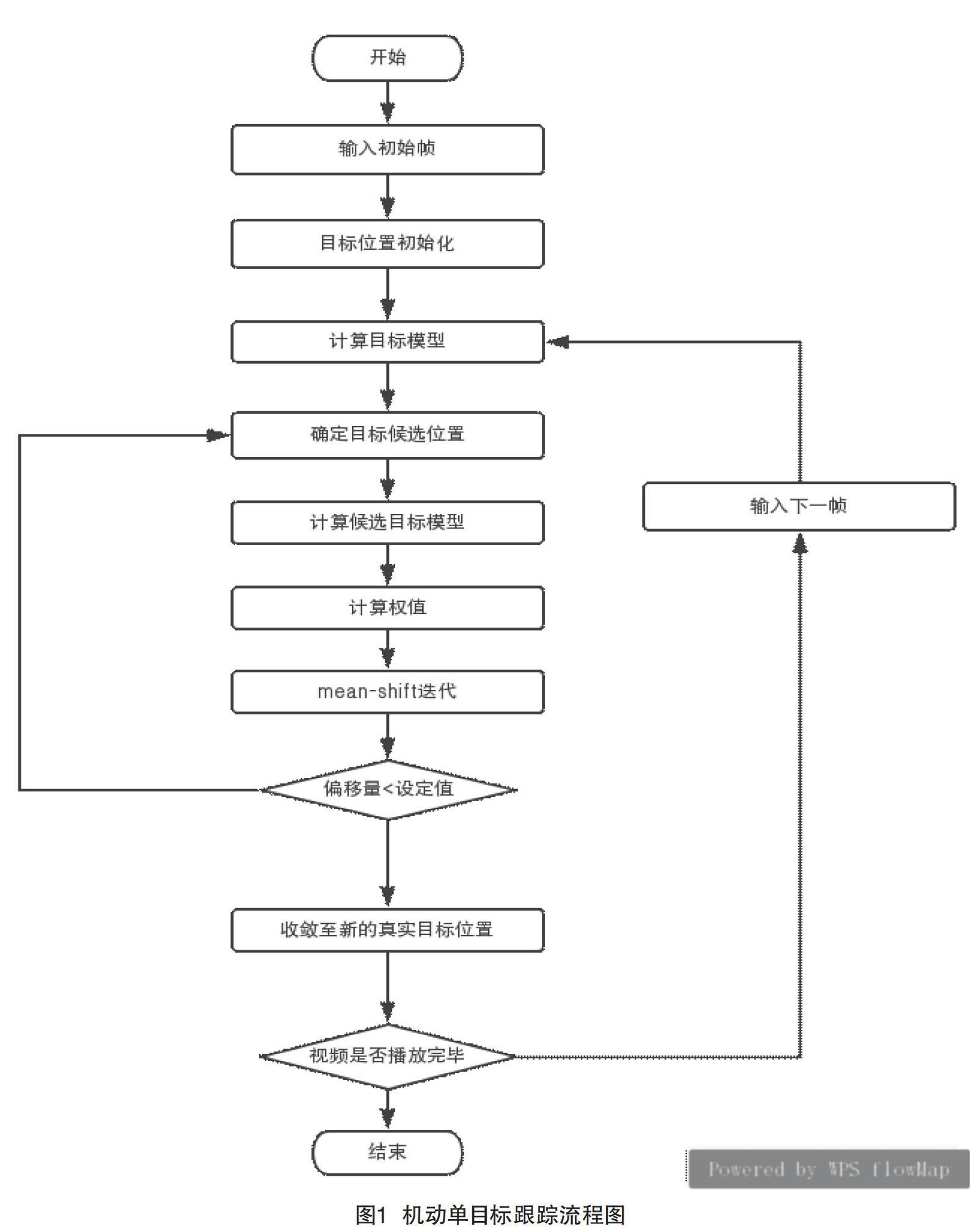
机动单目标跟踪算法步骤如图1所示。
算法第一步先交互选取一个目标框,选择感兴趣目标,即初始化目标位置。然后对该目标进行模型分析、计算分布函数以及目标中心、候选目标模型分布和权值等坐标,再根据均值漂移向量计算出目标的新位置,通过比较漂移量再次确认目标的真实位置[4]。
3 仿真结果分析
实验一中的实验背景为简单背景,目标为从左到右行驶的黑色小型SUV车辆,光照条件充足、目标颜色特征明显,摄像头静态稳定。实验二中是改变了光照条件,在阴天光照相对不足、色彩不鲜明的情况下进行的实验。两组实验均采用matlab2018a软件环境,选取的三组视频来自校内拍摄,帧数为200帧。
使用均值漂移算法进行三组目标跟踪的结果如图2、图3所示。
其中,图2实验目标为近点黑色suv汽车,目标行驶方向从左向右。手动框选目标后双击以进行目标跟踪。其中蓝色框为手动选取框,白色框为跟踪框,并在接下来识别的图片序列中一直跟踪目标车辆[5]。实验背景为静态背景,干扰不大的状态下跟踪效果比较好。图3以左侧自行车为跟踪目标,由于分辨率等因素导致目标较小,并且目标在运动过程中会产生如蹬车等动作导致目标会发生一定变化,这都可能成为影响目标跟踪的精度和结果。为了尽可能减少图像信息的影响,将较小的目标图片进行了放大处理。图3作为实验二是为了分析均值漂移算法在光照条件不是十分理想的情况下的跟踪效果,最终经过多次实验、反复调整跟踪框的大小,结果表明通过选取合适大小的跟踪框,可以提高算法的精度和准确度。而阴天条件实验二也表明了均值漂移算法能够对光照条件相对不理想的图像进行跟踪分析[6]。
4 结语
本文分析了均值漂移算法的原理以及该算法在目标跟踪中的实际应用,并进行了算法实验,给出了实际应用效果。根据结果可以看出,跟踪框和目标存在一定的可接受的误差,目标在运动过程中大小发生了一定改变,但是跟踪框始终能够跟上目标汽车的行动。表明目标大小、视频清晰度、运动过程以及感兴趣目标区域的选取对于该算法的精度也会产生较大影响,当目标图像不理想时,应尽量选取该目标的显著特征进行跟踪,并减少任何会导致跟踪精度下降的无用因素。故可以认为该算法在简单背景下基本满足准确性和鲁棒性的要求,并且具有实时性。即均值漂移算法可以很好地对简单静态背景下的单个目标进行跟踪。
参考文献
[1] 曾宪佑.复杂场景下鲁棒的目标跟踪算法研究[D].北京:北京交通大学,2019.
[2] 陈玲,李洁.基于视觉传达的后继帧视频图像目标跟踪仿真[J].计算机仿真,2020,37(4):347-351.
[3] 王战,杨绍清,刘松涛,等.移动摄像下的目标跟踪算法[J].现代防御技术,2019,47(3):121-127.
[4] 谷晓琳,周石琳,雷琳.基于m-best数据关联和小轨迹关联多目标跟踪算法[J].系统工程与电子技术,2017,39(7):1640-1646.
[5] 余升林.基于传感器信息融合的車辆识别与测量研究[D].武汉:武汉理工大学,2019.
[6] 许二敏.跨摄像头目标跟踪技术研究[D].重庆:重庆邮电大学,2019.
