CBTC系统中ARB判定方法
2021-07-27许阳阳朱文才
许阳阳,朱文才
(1. 南京恩瑞特实业有限公司,南京 211106;2. 中国铁路上海局集团有限公司南京电务段,南京 210011)
基于通信的列车控制系统CBTC(Communication Based Train Control)是城市轨道交通中应用最为广泛的信号系统。利用无线通信来实现车地之间的双向通信,取代了传统的轨道电路实现列车运行控制,相较于传统的点式信号系统而言,追踪间隔更短,运行效率更高,安全系数也更高[1-3]。
在地铁日常运营中经常会出现计轴故障,影响列车运行[4]。常见的计轴故障有3种:
第一种,计轴磁头受到干扰,这很有可能是因为轴磁头被金属类异物划破;
第二种,在传输数据中有阻塞或者错误状况;
第三种,计轴板块有死机状况出现。
如果计轴系统受到干扰而导致区段故障占用,区域控制器(ZC) 可以将该故障占用区段与ZC已经获得的列车位置信息进行比较; 如果位置相差较远,以至于不可能是线路上的列车进入该区段而导致的区段占用,则判断为该区段为故障占用,即ARB状态[5]。CTC车可按无车占用的情况处理ARB 状态区段,达到在保证安全性的前提下,提高运营效率的目的。
1 ARB判定和复位方法
1.1 ARB判定方法
计轴区段 ARB 状态默认为无 ARB。若计轴区段物理空闲,则计轴区段 ARB 状态为无 ARB;若计轴区段物理占用状态无法获取,则计轴区段 ARB状态为无 ARB;若计轴区段物理占用且未标记为报告车占用,且原先非ARB,则进行 ARB 检测[6]。
ARB 检测方式为:TVS 物理占用但无报告车占用,且 ZC 确定此时该 TVS 内不可能有车,TVS延伸区域无任何隐藏车,判定该 TVS 区段逻辑占用状态为“ARB”故障,即同时满足以上几个条件则可判定该区段内无列车占用,其 ARB 状态设为有ARB[7]。判定过程如图1所示。

图1 ARB判定过程Fig.1 ARB judgment process
使用列车(驶出待判定ARB的列车)筛选端点进行ARB判定时,防止列车速度过快,TVS过短导致飞车,需要使用“ARB判定延伸区域”,避免导致ARB误判定。
如使用列车(驶出待判定ARB的列车)筛选端点进行ARB判定,TVS由占用到出清具有延时性[8], 如不做延时处理也会导致误判ARB。
“ARB判定延伸区域”计算方法:列车车头至轮轴长度+TVS出清到占用延时内列车最大速度行驶距离+ CI传输TVS状态延时内列车最大速度行驶距离+ CI到ZC通信中断的容忍时间内列车最大速度行驶距离。
1)非道岔运行、道岔定向运行
例如:6.25 m(列车车头至轮轴的距离)+5 s(TVS由出清到占用延时时间+容忍延时)×22.5 m/s(列车最大速度 80 km/h)=118.75 m。
2)道岔侧向运行
例如:6.25 m(列车车头至轮轴的距离)+5 s(TVS由出清到占用延时时间+容忍延时)× 10 m/s(道岔侧向允许最大速度 35 km/h)= 56.25 m。
当道岔位置处于未定义时,按照定向最大允许速度计算隐藏车安全包络。
但是随着市场走向成熟,以宽带普及为关键指标的传输层服务水平从快速增长期进入了平缓期。“宽带中国”战略将宽带分类为公共事业而不再是电信增值服务,这表明,中国政府认为宽带是日常生活的基本必需品,是一个社会问题(用户和应用)而不仅仅是一个基础设施问题(网络和服务)。在服务水平上,西部省区和东部省区还有一定的差距,但是受制于西部地区的经济发展水平和人民消费能力,通过加大投资力度提升基础设设水平来带动传输层信息经济水平提升的空间有限。
当待判定ARB的TVS的“延伸区域”含多道岔时,若道岔有位置,可通过该道岔,则视为直股;若不可通过该道岔,则查找到岔心处,停止当前路径的查找。
若道岔失去表示,本道岔所有分支皆属于障碍物搜索范围;若从岔前分支进入,则所有分支皆视为可通过。如需继续查找,可分别沿着岔后与反位分支向前继续查找;若从反位分支进入,则视为道岔位置在反位,可通过该道岔。如需继续查找,可沿着岔前分支向前继续查找;若从岔后分支进入,则视为道岔位置在定位,可通过该道岔。如需继续查找,可沿着岔前分支向前继续查找。
1.2 ARB复位方法
计轴区段已经判定为ARB,当非逻辑出清时,以下情形不取消ARB故障。
1)头筛选+尾部未筛选:尾部未到达ARB区域时,ARB不取消。
2)头筛选+尾筛选:ARB不取消。
即:列车未筛选端点包络及疑似隐藏车包络覆盖该TVS区域时,该TVS的ARB状态复位。
ARB 故障需通过人工计轴复位来恢复。计轴区段 ARB 状态为有 ARB 时,不影响 MA 计算,计算移动授权时相当于该 TVS 状态为空闲。计轴区段ARB 故障状态可保持,一旦满足 ARB 取消条件即转为无 ARB 状态。
2 ARB判定相应场景
ARB判定场景根据延伸区域内有无道岔分为两类:延伸区域内无道岔ARB判定和延伸区域内有道岔ARB判定。延伸区域内有道岔ARB判定,又根据道岔有位置跟无位置两种,当道岔有位置时,跟延伸区域内无岔ARB判定处理相同;道岔没有位置时,需要对3个分支都进行延伸区域的判定。
2.1 延伸区域内无道岔ARB判定场景
如图2(a)所示,当TVS3占用时,延伸区域内没有任何的车,TVS3的占用不是因为列车驶入,是因为计轴故障,可以进入暂判定ARB。上述条件保持到延时结束后,TVS3区段ARB判定成功。
如图2(b)所示,当TVS3占用时,延伸区域内有筛选过的报告车,列车的筛选标志保证周围没有隐藏车存在的可能性,因此TVS3的占用不是因为列车驶入,而是因为计轴故障,可以进入暂判定ARB。上述条件保持到延时结束后,TVS3区段ARB判定成功。
如图2(c)所示,当TVS3占用时,延伸区域内有未筛选的报告车,可能存在隐藏车。由于系统延时,隐藏车可能会到TVS3中,因此TVS3不满足ARB判定条件,待延时结束后会被标记上MT(非通信)车。
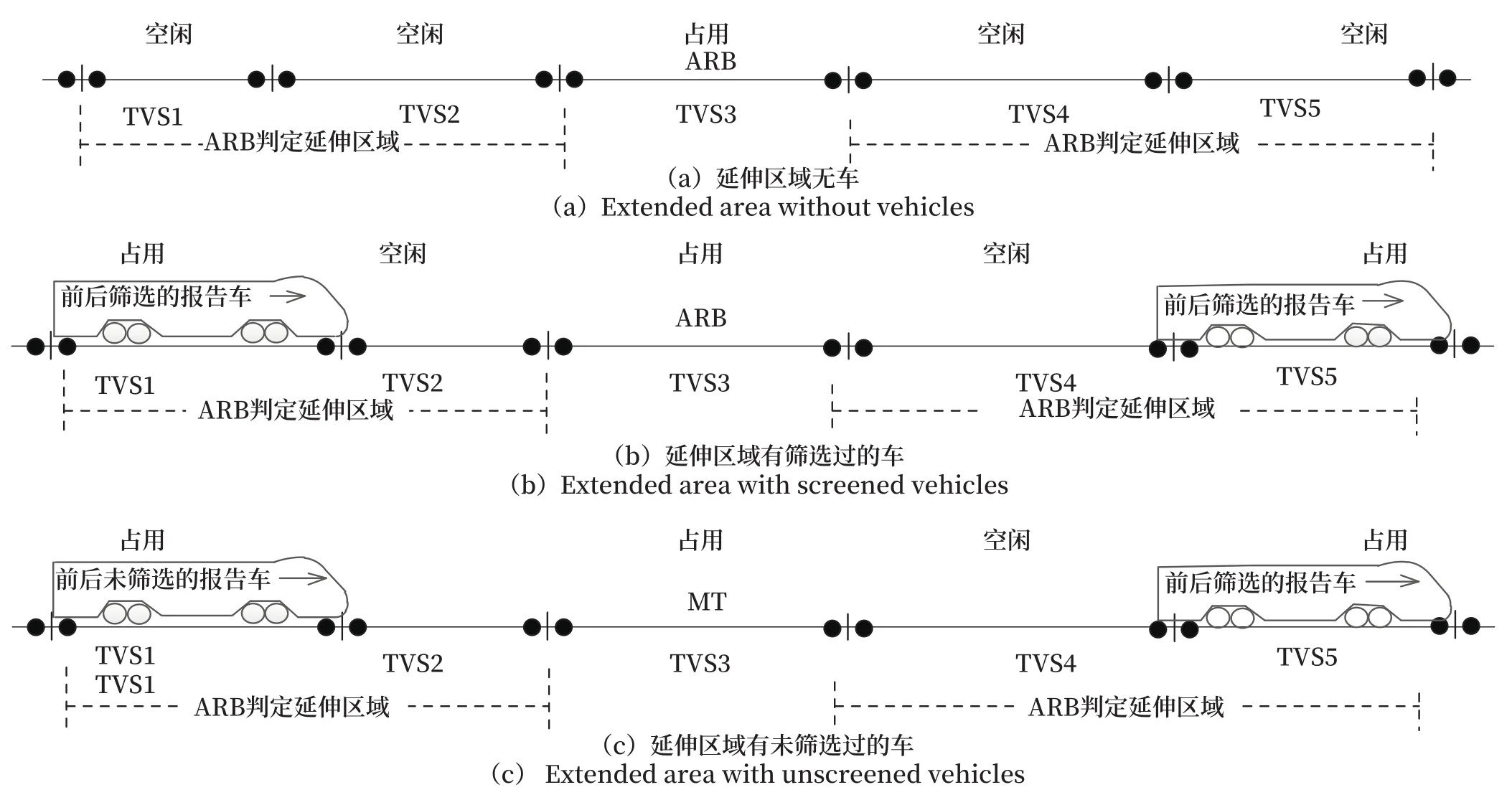
图2 延伸区域内无道岔ARB判定场景Fig.2 ARB judgment scenario without turnout in the extended area
2.2 延伸区域内有道岔ARB判定场景
关于延伸区域内有道岔的ARB判定如图3所示,根据道岔是否有位置分为两大类:当道岔有位置时,跟无岔区段判定方法一致,只关注道岔所在位置相应延伸区域,其他位置不在判定范围内;当道岔没有位置时,需要关注所有可能的范围内是否存在隐藏车。
如图3所示,道岔1处于反位时,除TVS3以外的其他计轴都处于空闲时,TVS3的延伸判定区域为图3中的延伸区域1和延伸区域3,TVS3的占用不是因为列车驶入,是因为计轴故障,可以进入暂判定ARB,上述条件保持到延时结束后,TVS3区段ARB判定成功。

图3 延伸区域内有道岔ARB判定场景Fig.3 ARB judgment scenario with turnout in the extended area
道岔1处于反位时,TVS3占用时,相邻的计轴TVS2和TVS8上有前后端筛选过的列车,ARB延伸判定范围(延伸区域1和延伸区域3)内有筛选过的报告车,列车的筛选标志位能够保证相应端没有任何隐藏车的存在,TVS5虽然有MT车占用,但是被道岔位置隔开了,对于TVS3的判定没有影响,所以TVS3的占用是由于计轴故障引起的,因此TVS会进入暂判定ARB状态,上述条件保持到延时结束后,TVS3区段ARB判定成功。
道岔处于反位时,TVS3占用时,左侧的待判定区域内(TVS2)有未筛选过的车,可能存在隐藏车,由于系统延时,隐藏车可能会到TVS3中,因此TVS不满足ARB判定条件,待延时结束后会被标记上MT(非通信)车。
道岔处于四开位置,TVS3所连接的三个分支都处于待判定区域,三个ARB延伸区域内(延伸区域1、2、3)都不存在隐藏车,TVS3的占用不是因为列车驶入,是因为计轴故障,可以进入暂判定ARB,上述条件保持到延时结束后,TVS3区段ARB判定成功。
道岔处于四开位置,TVS3所连接的三个分支都处于待判定区域,三个ARB延伸区域内(延伸区域1、2、3)都存在已筛选的报告车,筛选标志位保证其相应反内都不存在隐藏车,TVS3的占用不是因为列车驶入,是因为计轴故障,可以进入暂判定ARB,上述条件保持到延时结束后,TVS3区段ARB判定成功。
道岔处于四开位置,TVS3所连接的3个分支都处于待判定区域,其中一个ARB延伸判定区域内(延伸区域1)存在非通信车,且非通信车不能明确其所在位置,TVS3的占用有可能是因为非通信的驶入而占用的,因此TVS3不满足ARB判定条件,会被标记MT。
3 结论
ARB判定功能是为了减小计轴系统故障占用的故障模式对CBTC 系统运营效率的影响而设置。本文提出的方法可以安全有效地判定出当前TVS是否属于ARB状态,不存在误判的情况,从处理逻辑上可保证ARB 判定的安全性。