基于柔性铰链的低频FBG加速度传感器
2021-07-26邱忠超王业伟滕云田张晋铨
邱忠超,王业伟,滕云田,张晋铨,洪 利
(1.防灾科技学院 电子科学与控制工程学院, 河北 廊坊 101601; 2.中国地震局地球物理研究所,北京 100081)
加速度检测是地震监测、结构健康监测以及资源勘探等领域的重要技术手段[1-3]。传统加速度传感器大多结构复杂、寿命较短,且易受环境影响,严重制约其在工程中的应用[4-6]。光纤布拉格光栅(FBG)振动传感器因其体积小、灵敏度高、能够抗电磁干扰、易组网等优点在加速度检测工程应用中拥有广阔的前景[7-8]。
梁磊等[9]提出一种椭圆铰链光纤光栅加速度传感器,椭圆铰链和质量块组成加速度传感器理论模型的弹簧质量系统,灵敏度为128 pm/g,可用于350 Hz以下的低频微弱振动信号的实时监测。Bing Yan等[10]提出一种新型双柔性铰链光纤光栅加速度,即使在50 g的冲击载荷下,结构的最大应变仍在屈服极限内,灵敏度为54 pm/g。戴玉堂等[11]设计一种用于中高频振动测量的双铰链加速度计,谐振频率为3000 Hz,灵敏度为16.43 pm/g。Linessio等[12]提出了基于柔性铰链结构的二维加速度传感器,该传感器具有温度补偿功能,用于二维加速度的测量。然而,这些传感器存在灵敏度低等问题,使其难以在工程实际中应用。
针对光纤加速度传感器灵敏度低的问题,提出一种基于柔性铰链结构的低频双光纤光栅加速度传感器。对其灵敏度和谐振频率进行理论分析,采用MATLAB软件对铰链厚度、铰链半径、质量块尺寸等结构参数进行分析和优化,利用ANSYS软件进行结构静应力和模态仿真,构建测试系统对传感器实物进行性能测试实验。
1 传感器设计
1.1 传感器结构
双光纤光栅加速度传感器为一体化结构,主要由L型刚性梁、柔性铰链、FBG及质量块四部分组成,如图1所示。该传感器是对称式柔性铰链结构,其中2根光纤光栅分别粘贴于结构上下两侧的沟槽内,并在粘贴时施加一定的预应力,避免光纤光栅产生啁啾效应。
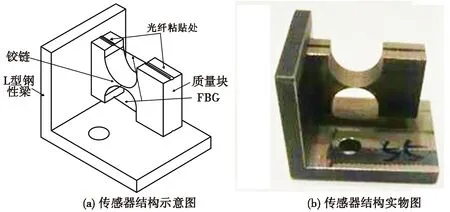
图1 传感器结构Fig.1 Sensor structure
当外界产生振动时,传感器整体会随振动信号运动。自由端的质量块会随惯性力上下振动,使固定其上的FBG受到来自质量块的拉力,从而影响光纤内反射光的中心波长。铰链结构上下对称,两根光纤光栅分别粘于结构上下两侧,当传感器振动时上下两端的形变方向相反,即两根光纤一根处于拉伸状态,一根处于收缩状态。两根光纤的反射光中心波长漂移量大小相等、方向相反,若将两者差分,则可提高传感器的灵敏度。
1.2 理论分析
传感器结构振动模型如图2所示,在振动信号产生的加速度a作用下,质量块受惯性绕柔性铰链中心微幅振动。
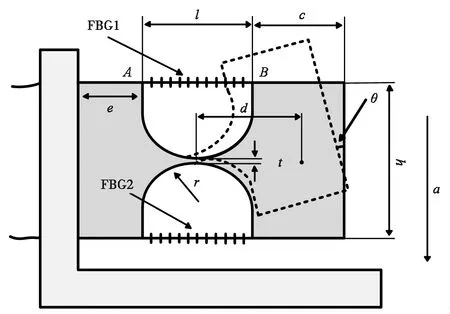
图2 传感器结构振动模型Fig.2 Vibration model of sensor structure
根据力矩平衡公式得
(1)

其中铰链刚度K为
(2)
式中,E为材料的弹性模量,w为传感器宽度,s=r/t,t为铰链厚度。
柔性铰链上、下两根光纤可分别表示为FBG1、FBG2,两根光纤的各项特性均相同。则当质量块上下微幅振动时,上下两根光纤由轴向应变产生的波长漂移量大小相同,方向相反,FBG1、FBG2的漂移量分别为
ΔλFBG1=ΔλB1+ΔλB2.
(3)
ΔλFBG2=-ΔλB1+ΔλB2.
(4)
式中,ΔλB1、ΔλB2分别为由光纤光栅轴向产生的应变ε和温度变化T引起中心波长的漂移量。两式做差分运算,即消除温度变化T引起中心波长的漂移量ΔλB2的影响,得到FBG中心波长由应变ε引起的变化量,并且提高传感器的灵敏度。
FBG加速度传感器灵敏度S为由FBG应变引起的中心波长变化量与加速度a的比值,可得
(5)
式中,λB为光栅的中心波长,Pe为光纤有效弹光系数,一般为0.22,本文中的所指的灵敏度为峰-峰值灵敏度2S。
由运动学方程进一步可求出整个系统的谐振频率为
(6)
式中,转动惯量为J。谐振频率f与传感器的可用带宽息息相关,传感器谐振频率越高,可用带宽越宽,但传感器灵敏度会显著下降。
2 仿真分析
2.1 结构参数分析
由式(5)和(6)可知,传感器的关键参数铰链厚度t、铰链半径r、质量块宽c、质量块高h对其灵敏度与谐振频率有较大影响,采用MATLAB对这4个参数进行分析。传感器的材料为弹簧钢,其弹性模量为210 GPa,密度为7 850 kg/m3。选取中心波长为1 555 nm、栅长为10 mm的光纤光栅,光纤有效长度l为12 mm。传感器宽度为7 mm。
第一组分析铰链厚度t和铰链半径r对传感器灵敏度和谐振频率的影响,令质量块高h=17 mm,0.1 mm≤t≤0.8 mm,4 mm≤r≤8 mm,质量块宽c分别为6 mm、10 mm和14 mm,结果如图3所示。
由图3可知,在不同的质量块宽度下,铰链厚度t对传感器灵敏度和谐振频率影响较大。铰链厚度t越小、铰链半径r越大,则传感器灵敏度越高、谐振频率越小。当t=0.8 mm时,传感器谐振频率达到了1 000 Hz左右,灵敏度下降到只有50 pm/g。为满足低频测量的要求,将传感器谐振频率限制在200 Hz以内,需t<0.3 mm;为实现灵敏度达到200 pm/g以上,需要t<0.3 mm,同时r>5 mm。
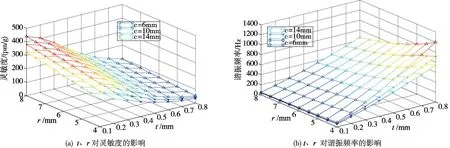
图3 铰链厚度t、铰链半径r对灵敏度和谐振频率的影响Fig.3 The influence of hinge thickness t and hinge radius r on sensitivity and resonance frequency
第二组分析质量块宽c和质量块高h对传感器灵敏度和谐振频率的影响,令铰链半径r=6 mm,6 mm≤c≤14 mm,10 mm≤h≤20 mm,铰链厚度t分别为0.2 mm、0.4 mm和0.6 mm,结果如图4所示。
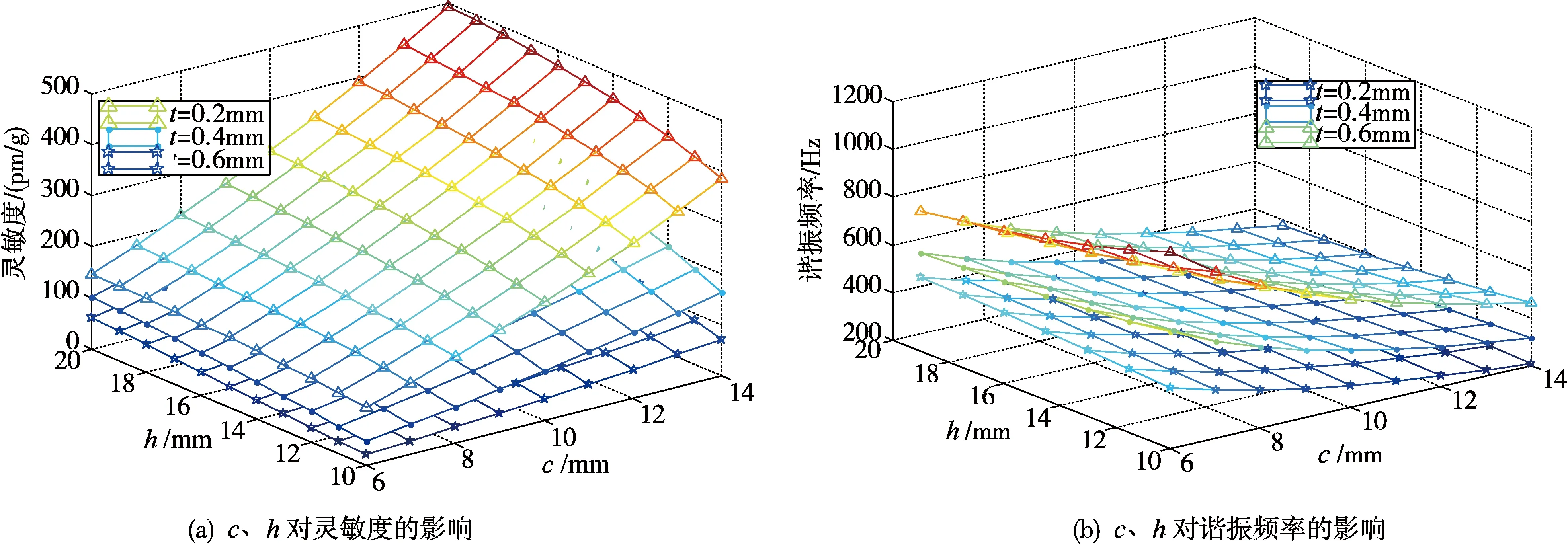
图4 质量块宽c、质量块高h对灵敏度和谐振频率的影响Fig.4 The influence of mass width c and mass height h on sensitivity and resonance frequency
由图4可知,质量块宽c对传感器灵敏度和谐振频率影响较大。传感器的灵敏度随质量块宽c和质量块高h的增大而增大,谐振频率随c和h的增大而减小。为满足低频测量和高灵敏度的要求,需c>9 mm,同时h>14 mm。
2.2 ANSYS仿真分析
由结构参数分析可知,铰链厚度t和质量块宽c发生微小变动时,会对传感器灵敏度和谐振频率产生显著影响,而铰链半径r和质量块高h在一定范围变动时,对传感器的影响相对较小。根据工程应用需要,保证谐振频率低于200 Hz,灵敏度高于200 pm/g,同时考虑传感器的尺寸和重量,选取t=0.2 mm,r=6 mm,c=10 mm,h=17 mm。采用ANSYS对结构进行静应力以及模态仿真,有限元模型参数如表1所示。
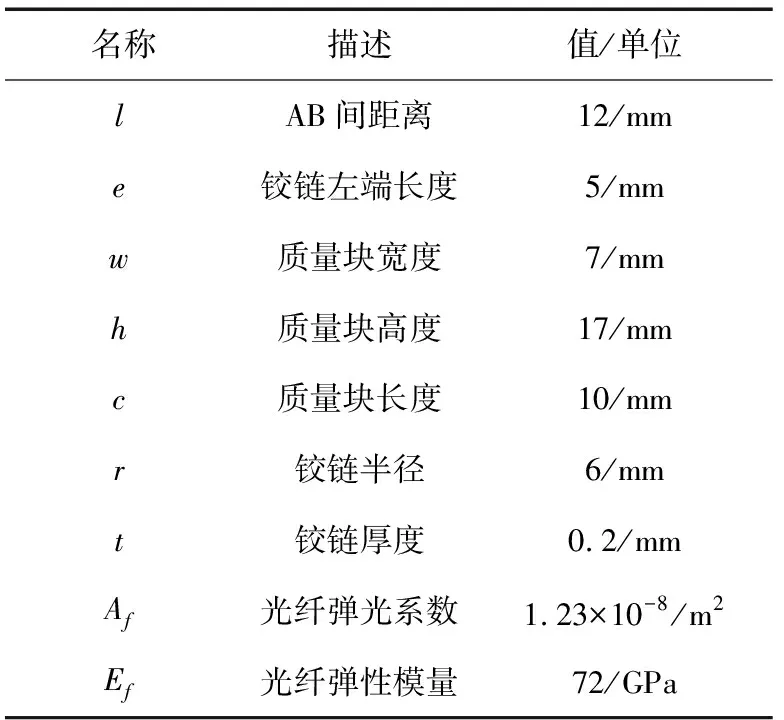
表1 FBG加速度传感器参数Table 1 FBG acceleration sensor parameters
传感器AB间的距离即为光栅的长度l,由于A点固定,B点位于质量块左端,在传感器振动过程中,光栅的形变量与B点的位移之间存在函数关系,不同频率下B点位移可反映传感器的幅频特性。在ANSYS中,设置加速度大小为2 g,得到B点位移与谐响应频率关系,如图5所示,可知传感器谐振频率在130 Hz左右。
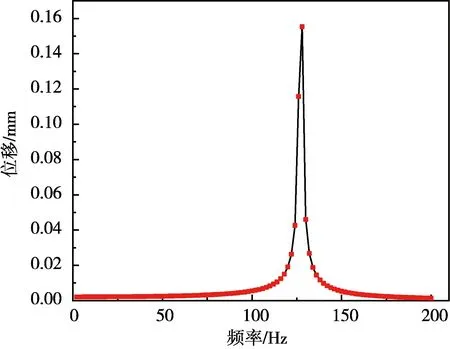
图5 B点位移与谐响应频率关系Fig.5 The relationship between B point displacement and harmonic response frequency
对传感器底座施加固定约束,在质量块的下表面施加大小为2 g的加速度,得到模型的等效应变图,如图6所示。可得自由端的形变量位移最大,从自由端到支撑端形变量逐渐减少。质量块左端B点的形变量为0.012 mm左右,说明该传感器结构可以实现外界振动信号的响应,并且形变量不影响光纤的物理性质,能够保证传感器的稳定性。

将模型放入模态分析模块中,对底座施加固定约束,模型整体建立网格划分。对模型进行模态分析,得到传感器前4阶模态频率分别为131.14 Hz、1 023.10 Hz、2 440.10 Hz和4 614.00 Hz,1阶模态如图7所示。
由图7可知,该结构的谐振频率为131.14 Hz,且1阶模态频率与2、3、4阶模态频率相差较大,说明传感器交叉耦合小,抗横向干扰能力强。
3 传感器测试实验与分析
振动实验系统由光源及信号放大系统、振动台配套系统和信号解调系统组成,如图8所示。振动台配套系统包括振动台、信号发生器、信号放大器;信号解调系统包括波长解调仪、计算机。宽带光源发出的光经环形器输送至加速度传感器,在光纤光栅中心波长处一定范围的光被反射回来,最终输送至解调仪,解调出光波波长变化所携带的信息。
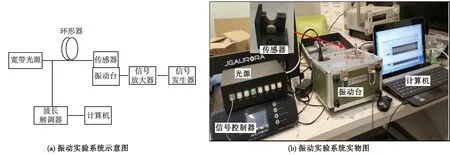
图8 传感器测试实验系统Fig.8 Sensor test experimental system
3.1 响应特性测试
为测试传感器响应特性,将振动台的输出频率设定为20 Hz,加速度设为10 m/s2,得到其输出频率对应光纤光栅加速度传感器响应的时域曲线,如图9所示。
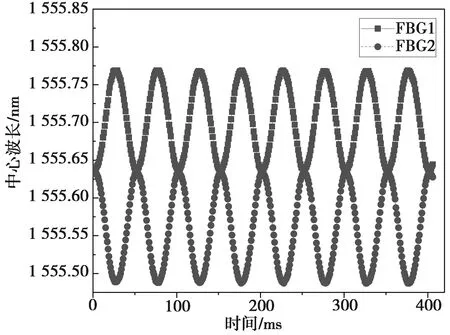
图9 时域响应曲线Fig.9 Time domain response curve
由图9可知,传感器具有良好的输出频率响应,在每一时刻,光纤光栅加速度传感器上、下两根光纤的中心波长漂移量大小相同且方向相反,若将两者差分,则可提高传感器灵敏度。
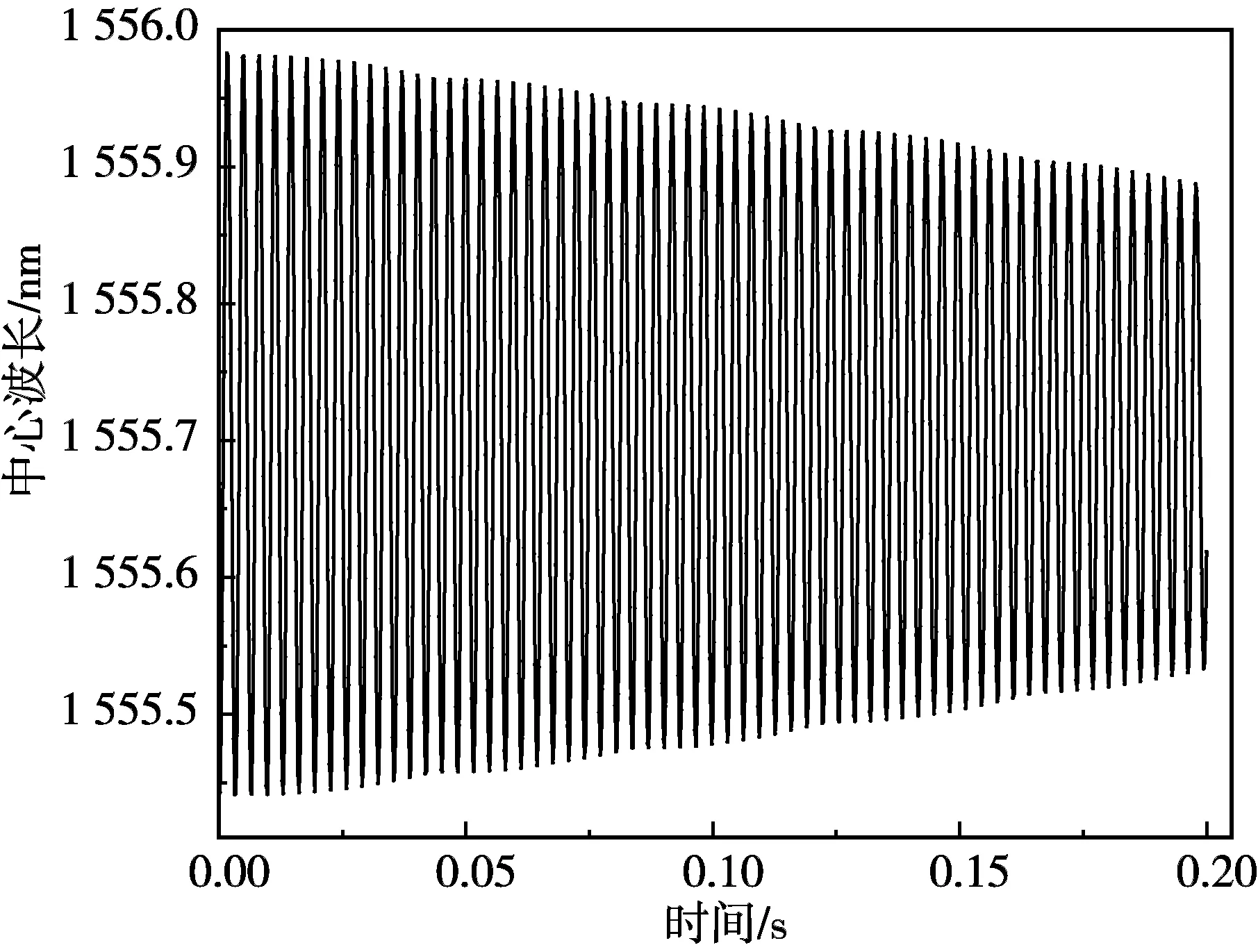
给传感器施加一个加速度大小为2 g的冲激载荷,得到传感器其中一根光纤光栅FBG1在0.2 s内的冲激响应,如图10所示。可知传感器中心波长漂移量随时间变化逐渐减小,传感器具有较好的冲激响应。
3.2 幅频特性测试
设置振动台加速度为5 m/s2,由信号发生器产生5~165 Hz的激励,得到加速度传感器幅频响应曲线,如图11所示。
由图11可知,传感器在90 Hz以下具有良好的平坦区。固有频率为117 Hz,与仿真分析的理论值131 Hz相近,误差可能是由于传感器加工时的损耗以及光纤粘贴时施加预应力造成。
3.3 线性度测试
设定振动台输出频率分别为20 Hz、40 Hz,以步长为1 m/s2改变加速度大小,变化范围为3~13 m/s2,记录2个不同频率下FBG1和FBG2中心波长的变化,得到线性度拟合线,如图12所示。
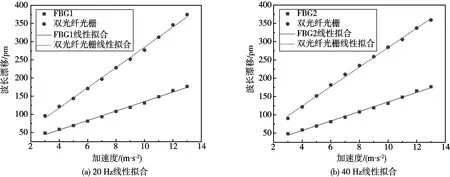
图12 线性度拟合图Fig.12 Linearity fitting graph
采集数据后分析处理得,输入频率在20 Hz时加速度传感器单、双光纤的灵敏度分别为130.1.3 pm/g和278.44 pm/g,40 Hz时单、双光纤灵敏度分别为130.1 pm/g和265.78 pm/g,双光纤20 Hz与40 Hz对应的线性度分别为R2=0.9968和R2=0.99738。结果表明,光纤光栅加速度传感器的线性度良好,且双光纤能达到增加灵敏度的作用。
实验测得传感器能够测量最小加速度为0.1 m/s2,能测得最小振动频率为5 Hz。与梁磊等[9]提出的椭圆铰链光纤光栅加速度传感器相比,在相同激励下,该传感器波长漂移量更大,灵敏度是其2倍,且双光纤消除了温度的影响。同时该传感器谐振频率更低,对100 Hz以下的低频信号测量效果更好。
3.4 横向抗干扰测试
将传感器固定于振动台上,设置加速度为10 m/s2,频率为40 Hz的正弦激励信号。记录在相同振动环境下传感器横向振动与纵向振动光纤光栅中心波长漂移量的对比,结果如图13所示。
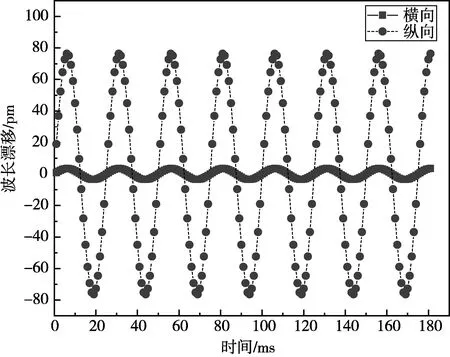
图13 横向抗干扰实验Fig.13 Horizontal anti-interference experiment
由图13可知,传感器的纵向响应与横向响应分别为153 pm和7 pm,横向光纤光栅中心波长漂移量仅为纵向的4.58%。说明传感器在振动条件下可以看作是单自由度振动,具有较强的横向抗干扰能力。
3.5 实验误差分析
实验测得的传感器灵敏度和谐振频率与理论分析存在一定的误差,主要由以下原因造成:1) 由于传感器尺寸较小且铰链结构部分较薄,在传感器加工时会有一定的加工误差;2) 铰链的旋转中心应该为某个微小区域,而非某一点,且粘合剂的用量、光纤光栅预应力的不同、器件加工误差都会对铰链的旋转中心造成影响,进而影响传感器的固有频率和灵敏度;3) 实验振动设备以及解调系统的精度都会对实验数据造成一定的误差。
4 结论
针对光纤加速度传感器灵敏度低的问题,本文提出了一种基于柔性铰链结构的低频双光纤光栅加速度传感器。对其灵敏度和谐振频率进行理论分析,采用MATLAB软件对铰链厚度、铰链半径、质量块尺寸等结构参数进行分析和优化,利用ANSYS软件进行结构静应力和模态仿真,构建测试系统对传感器实物进行性能测试实验。结果表明,该传感器的谐振频率为117 Hz,在5~90 Hz的低频段具有平坦的灵敏度响应,灵敏度约为278 pm/g,光纤中心波长漂移量与加速度有较好的线性相关性,横向干扰程度小于5%。为光纤光栅加速度传感器的工程应用提供借鉴。
