层次优化目标与背景的匹配滤波高光谱目标探测研究
2021-07-23张世瑞樊彦国张汉德禹定峰
张世瑞,樊彦国,张汉德,2,禹定峰
(1.中国石油大学(华东)海洋与空间信息学院,山东 青岛 266580;2.海警总队第六支队,山东 青岛 266012;3.齐鲁工业大学(山东省科学院),山东省科学院海洋仪器仪表研究所,山东 青岛 266061)
1 引 言
高光谱数据具有很高的光谱分辨率,在可见光—近红外区域光谱分辨率可以达到纳米级,能够获得地物详细而精确的光谱信息[1]。高光谱影像除了二维的空间数据,它还包含丰富的光谱数据,拥有一百乃至几百个波段。高光谱的特点,使得它在目标探测领域具有独特的优势,近年来,高光谱目标探测越来越受到重视,相关的文章也逐渐增多。高光谱目标探测有众多的算法。常见的有SAM(Spectral Angle Mapper)光谱角制图法[2]、MF(Matched Filter)匹配滤波方法[3]、CEM(Constrained Energy Minimization)约束能量最小化探测方法[4]。SAM应用在高光谱分类上较为广泛,在目标探测上也有广泛的应用,通过比较需检测像元与目标像元的光谱角大小来进行目标探测。MF是根据马氏距离来进行判别,假设目标与背景都服从多元正态分布,判断需检测像元到目标与背景中心之间的距离来进行目标探测。CEM通过设置探测器,使得目标信号通过后为定值,整体信号输出后总的输出能量最小,起到抑制背景的作用。己知目标光谱信息时,现有的目标探测方法建立在像元光谱表示模型的基础上,通过概率密度模型、子空间模型、光谱混合模型等表征像元光谱,采用光谱分解、信号匹配、特征空间投影、假设检验等方法增强目标和背景可分性[5]。CEM可以归为基于光谱信号匹配的目标探测方法,而MF可以归为假设检验的方法。耿修瑞[6]在理论层次证明MF是优于CEM的,他还证明随着波段数目的增多,CEM的总体输出能量越来越小,能达到更佳的探测效果,不过前提假设是目标光谱没有变化或变化较小。核函数与MF变换相结合[7]能够提高匹配滤波的效果。郝晓惠[8]将垂直于目标光谱的向量分层次引入SAM,取得了较好的高光谱目标探测效果。
本文首先利用传统MF算法对高光谱数据进行目标探测,探测完成后,选定一定的阈值进行阈值分割,分割为目标和背景两部分,计算目标类和背景类的均值。为了增大目标类和背景类的可分性,引入零向量,改变像素值。然后再次进行MF算法实验,进行阈值分割,逐层次计算,设定迭代停止条件,完成目标探测。本文实验利用圣地亚哥飞机场数据和Cri数据进行实验验证,通过比较ROC曲线、AUC的值和探测效果图,结果表明,本文的方法能够提高高光谱目标探测效果。
2 MF目标探测方法
MF方法假设目标类和背景类均服从多元正态分布,通过比较待探测像元到两类中心的马氏距离,判断待探测像元更有可能属于哪一类[5]。MF原理如图1所示。
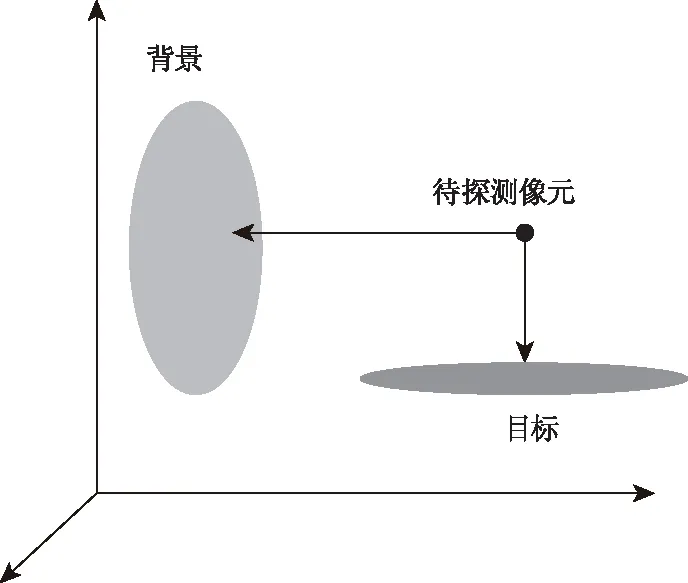
图1 MF原理图
MF方法基于假设检验的方法,假设模型如下:
(1)
其中,H0假设目标存在;H1假设目标不存在,在两种假设下,均值μ和协方差Γ均不相同,当两种假设下均值和协方差矩阵都已知时,可以构建目标探测器:
(2)
式中,x表示待探测像元。当Γ0=Γ1=Γ时,式(2)可以转化为:
(3)
(4)
(5)
将高光谱数据经过wMF滤波器处理后,进行阈值分割,来判别目标和背景。
3 层次优化目标与背景
由式(5)得到了MF探测器,但是对于μ0和μ1的估计是不准确的,因此对两个均值进行重新估计。MF探测器进行目标和背景判别后,得到了高光谱影像的目标与背景。利用得到的目标与背景重新计算μ0和μ1,得到新的MF探测器,进行阈值分割重新对影像进行目标与背景的判别。利用此方法,逐层次运算,进行迭代,直至达到最优的效果。
在层次化迭代运算过程中,一个重要的问题是阈值分割,阈值的选择决定了探测目标的准确程度。合适的阈值,能够将目标与背景最大程度分离开,提高高光谱目标探测的探测率,降低虚警率。随着层次化,阈值的选择也要顺应输出结果进行变换。高光谱数据经过MF探测器后,得到探测结果Yi,(i=1,2,…,m),m为总像元数目。本文为了较好地进行阈值选择,根据每个层次Yi平均值的结果进行相应阈值的调整。经过多次实验发现,Yi的平均值逐渐变小。故本文随着迭代的次数,阈值逐渐降低。
TH=b-0.01×j
(6)
式中,b为初始阈值,一个常数;j为迭代次数。本文将MF探测器结果值进行归一化处理,结果在0~1的范围内。
在层次化运算过程中,为了增大目标与背景的区分性,增大两者之间的马氏距离,引入零向量a,通过零向量来改变原像素值。为了控制像素值更改速度,引入指数函数。
(7)

高光谱数据X,X∈Rn×m,m个总像元,n个波段,探测目标光谱d,d∈Rn×1。
具体过程如下:
①高光谱数据X经MF探测器处理后,得到探测结果Yk;
②对探测结果Yk进行阈值分割,确定目标与背景;
③利用上式(7),对高光谱数据的像素值进行优化;
④根据第二步得到的目标和背景,根据上式(4)重新计算μ0和μ1;
⑤利用计算的μ0和μ1,得到新的MF探测器,优化的高光谱数据经探测器处理后,得到探测结果Yk+1;
⑦对探测结果Y进行阈值分割,得到目标与背景。
4 实验分析
本次目标探测数据利用AVIRIS数据和Cri数据。AVIRIS在圣地亚哥飞机场收集影像,在丢弃吸水率和低信噪比的一些波段后,保留下189个波段。影像上包含三架飞机,真实飞机分布情况如图2(a)所示,飞机场彩色图像如图2(b)所示。Cri数据由人为摆放的10颗石头组成,包含46个波段。Cri数据石头真实分布情况如图3(a)所示,灰度图像如图3(b)所示。
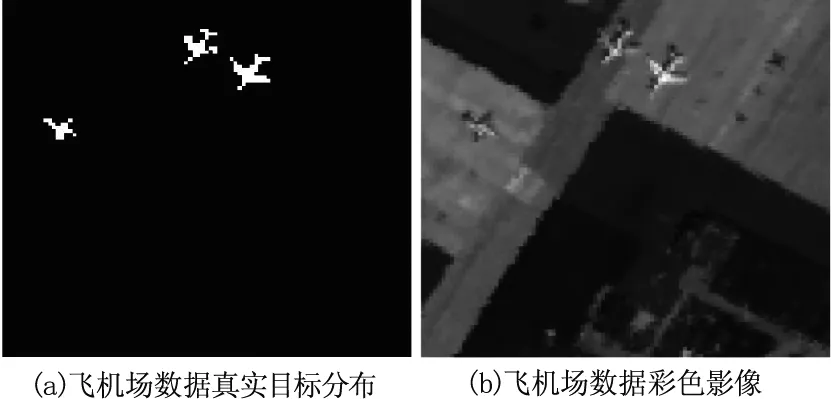
图2 飞机场数据真实目标分布和飞机场数据彩色影像
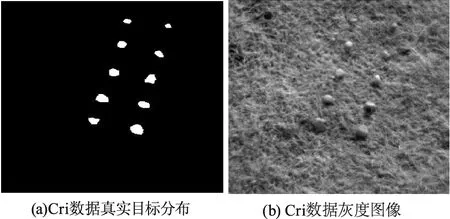
图3 Cri数据真实目标分布和 Cri数据灰度图像
为了证明本文提出的层次优化目标与背景的匹配滤波算法(HO-MF)的有效性,用另外三组算法作对比,两组实验数据经过MF、CEM、MNF-MF、HO-MF四种探测器处理后,绘制ROC曲线并计算曲线下面面积AUC的值。ROC曲线是目前高光谱目标探测中最常用的评价指标,它以探测率为纵轴,以虚警率为横轴。ROC曲线越靠左上角,AUC的面积越大,说明高光谱目标探测效果越好。飞机场数据的四种算法实验的ROC曲线如图4所示,Cri数据的四种算法实验的ROC曲线如图5所示。
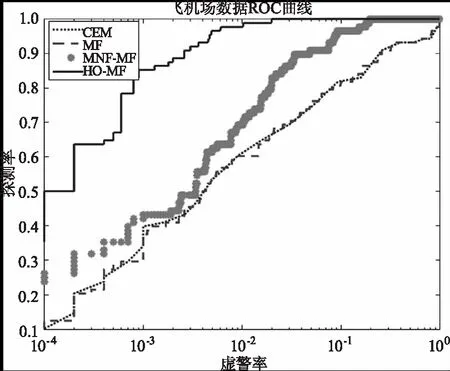
图4 飞机场数据ROC曲线
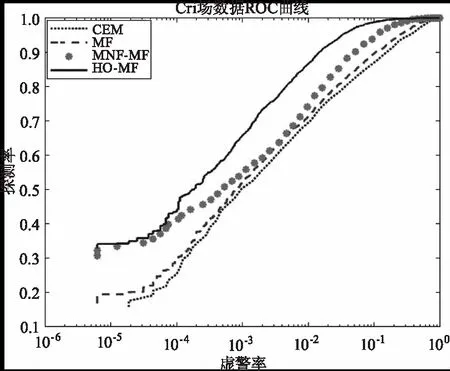
图5 Cri数据ROC曲线
飞机场数据的四种算法实验的结果图如图6所示,Cri数据的四种算法实验的结果图如图7所示,两组数据八次实验的AUC值如表1所示。
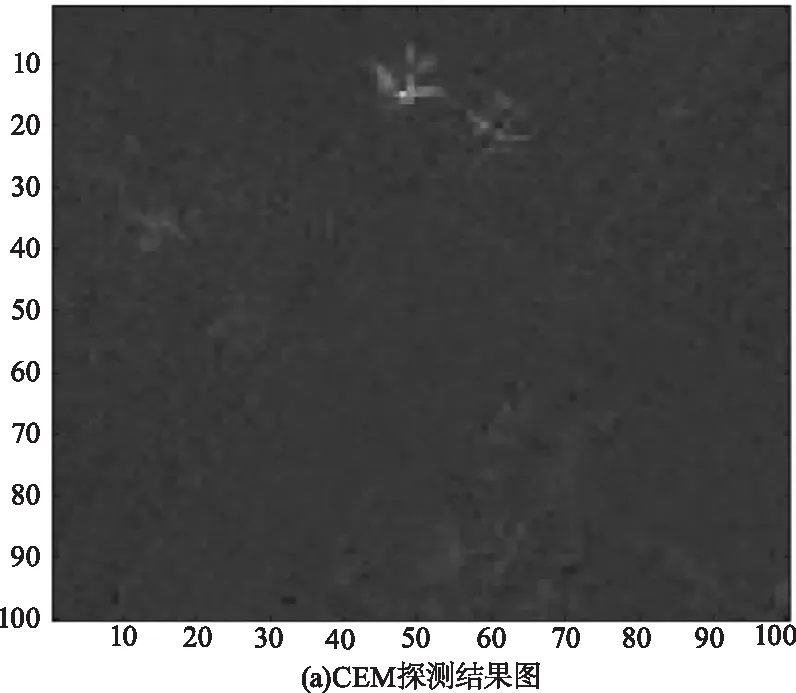
图6 飞机场数据
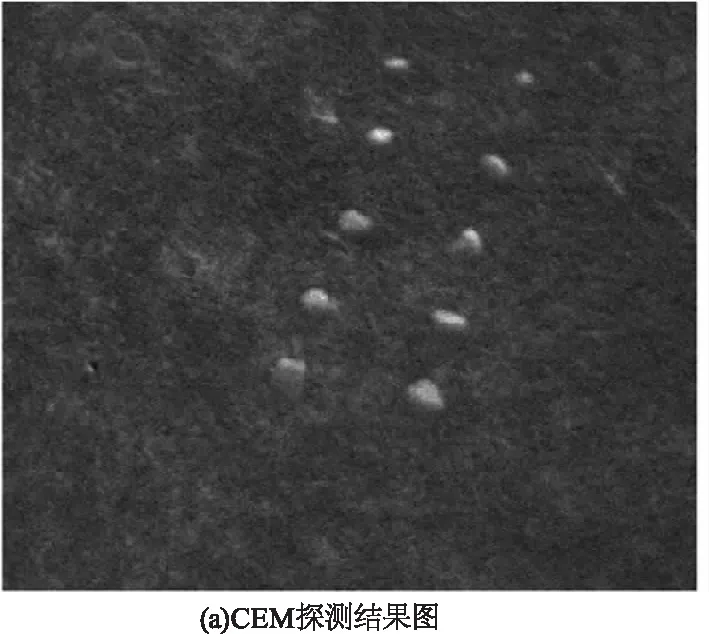
图7 Cri数据
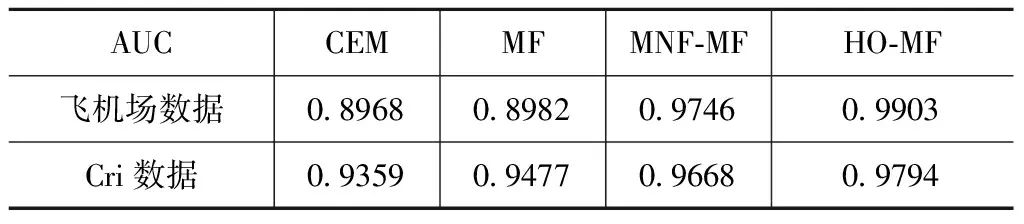
表1 AUC的值
通过两组数据的ROC曲线和曲线下方面积AUC的值可以看出,本文提出的层次优化匹配滤波(HO-MF)算法与另外三种探测方法相比,本文算法AUC的值更加接近1,ROC曲线更加趋向左上角。从两组数据的最终结果图上也可以看出,本文算法对高光谱图像的背景抑制更强,更能够突出目标,优于另外三种探测方法。对于Cri数据,MNF-MF算法与HO-MF算法相比,在同等探测率情况下,MNF-MF算法虚警率较高。从探测结果图上也能够看出,MNF-MF算法探测结果图中周围背景与目标相差较小,对背景的抑制能力较弱,容易造成误判。以上实验结果和数据表明,本文的层次优化目标与背景的匹配滤波算法,要优于一些传统目标探测算法,能够提高高光谱目标探测的效果和精度。
5 结 语
本文将零向量和阈值分割迭代引入MF算法,通过改变原像素值来扩大目标类和背景类之间的马氏距离,分层次计算目标和背景。最后通过设置阈值来停止迭代,得到目标探测结果。本文在分割目标与背景选择阈值时,通过探测结果平均值做了简单的拟合,但是不能够完全符合阈值的变化,如何准确地选择阈值是一个重点的问题。本文实验数据是全像元级别的,CEM和MF也主要对应于全像元级别的目标探测,在亚像元级别的目标探测[9],是一个重点的研究方向。
