某新型无人帆船的结构设计及翼帆气动性能分析
2021-07-20赵大刚管殿柱夏涛
赵大刚 管殿柱 夏涛


摘要: 为了满足无人帆船在进行海洋调查时航时长、范围大和寿命高的要求,本文设计了一款新型无人帆船。通过SolidWorks软件建立无人帆船的三维模型,并采用计算流体动力学(computational fluid dynamics,CFD)对翼帆的气动性能进行分析。在考虑帆船航行实际工作状态的前提下,通过比较柔性帆、刚性帆和翼型对称截面与非对称截面的性能,确定了主帆为NACA 0021,尾翼为NACA 0018翼型的对称刚性帆,以提高帆船的气动性能。同时,采用与飞机升降舵类似结构的尾翼控制翼帆与来流的攻角,极大地降低了控帆的难度与功耗。为分析翼帆的气动性能,选用SST kω模型在Fluent中进行模拟分析。研究结果表明,翼帆的升力系数较大,空气流动平稳,并未出现涡流区,同时,翼帆表面压力呈现平滑的过渡现象,使气流可以平稳的从主帆表面分离,满足设计要求。该研究对使用无人帆船探索海洋具有重要意义。
关键词: 无人帆船; 结构设计; 翼帆; 气动性能
中图分类号: U662.3; U664.31 文献标识码: A
随着全球经济的高速发展,煤炭、石油等不可再生能源的消耗在不断增多,人们逐渐将能源的开采重心从陆地转移到海洋[1]。由于世界各国越来越重视对海洋环境的监测和海洋数据的采集,因此对海洋的探索和研究已成为目前自然科学的热点之一。传统的海洋探索观测技术有人工出海考察、数据浮标和卫星观测等方法[2],但上述观测方法存在成本较高、机动性差和观测时间短等局限性。以风能为动力的无人帆船具备在海上长时间自主运行的能力,可以用来调查海洋资源、监测海洋环境和预警海洋灾害[3],这种方法具有成本低、续航时间长和数据可信度高等优点。近年来,国内外学者对无人帆船进行研究,上海交通大学罗潇等人[4]研发了基于嵌入式系统PC/104和嵌入式处理器(advanced RISC machines,ARM)的无人帆船控制系统,可将无人帆船各类传感器采集的环境信息转变为电信号,生成无人帆船的运动控制指令;康梦萁等人[5]提出的速度最优法要比A*算法更适合无人帆船的短途航行;法国海洋开发研究院[6]设计了一款以平衡软帆为动力的无人帆船,独立的平衡软帆减少了绳索和滑轮对风帆的控制,有效降低了帆船航行时绳索打结发生的概率。上述无人帆船多以传统柔性帆为动力系统,但柔性帆的气动性能不佳,容易发生气弹失稳现象[7],在实际航行状态下,升力系数较低,在0.6~0.7之间[8]。此外,柔性帆具有复杂的空气动力学性能,这使精确控制船帆转变攻角较复杂。对上述传统柔性帆存在的缺点,科研人员提出了将刚性帆代替传统柔性帆的解决方法。基于此,本文主要对某新型无人帆船的结构设计及翼帆气动性能进行分析。建立了无人帆船三维模型,并采用计算流体力学,分析翼帆的气动性能。该研究对开发和利用小型无人帆船具有较大的应用价值。
1 无人帆船的结构设计
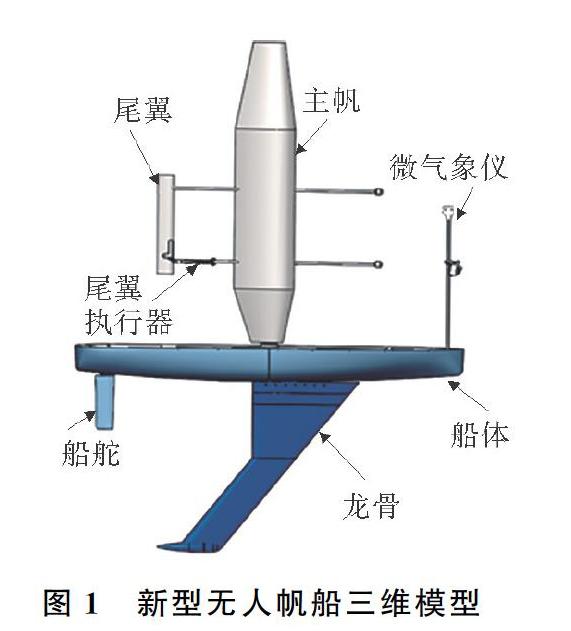
新型无人帆船包括船体、龙骨、船舵和翼帆等,翼帆由主帆、尾翼和尾翼执行器组成。帆船龙骨的作用是防止船体横向漂移和作为压舱物[9]保证帆船的稳定,防止发生倾覆;船舵实现了对帆船航向的控制;帆为动力原件,利用风能为帆船的航行提供动力;尾翼用来控制主帆的旋转,尾翼执行器是一个安装在主帆横杆上的电动推杆,可以控制尾翼的迎风角度。同时,在船体表面铺设柔性太阳能板,为船中的仪器提供能量。新型无人帆船三维模型如图1所示。
1.1 主帆设计过程
1) 柔性帆与刚性帆。
船帆采用刚性帆的主要原因:一是刚性帆比柔性帆具有更好的气动性能及更高的效率,且刚性帆的最大升力系数可以达到1.6[10],不会发生气弹失稳现象,也不会产生因拍打而发出噪音的情况;二是柔性帆具有复杂的空气动力学性能,这使控制柔性帆改变攻角时比较困难[11],而刚性帆具有不变的几何外形,空气动力学性能简单,将桅杆设置在刚性帆的气动压力中心附近,可以轻松控制主帆的旋转。
2) 对称性。船帆翼型截面可以对称,也可以不对称,翼型截面对称性如图2所示。与对称截面相比,非对称截面可以获得更高的升阻比和最大升力系数[12],但对称截面在相同角度的正攻角与负攻角下,翼型产生的升力相同。由于帆船需要具备在左舷风和右舷风均可航行的功能,因此,选择对称截面的船帆。
3) 翼型截面的确定。在无人帆船、水翼船和风力机设计中,设计师多采用美国国家航空咨询委员会(national advisory committee for aeronautics,NACA)开发的一系列翼型[13]。通过测试NACA 00ZZ系列对称翼型的气动性能,最终选定NACA 0021翼型作为主帆的翼型截面。由于NACA 0021具有较厚的截面,使它在风速较低的情况下,依旧能产生较大的升力系数[14],并且升阻比性能较好、失速攻角较大。尾翼部分与主帆部分的设计方法基本相同,区别在于设计尾翼参照的雷诺数较低。因此,尾翼的翼型截面選择NACA 0018翼型,主帆和尾翼的翼型截面如图3所示。
1.2 翼帆结构设计
1.2.1 飞机机翼与尾翼结构
飞机机翼的作用是为飞机的飞行提供升力,尾翼控制飞机的俯仰。在航行时,飞机可以通过控制尾翼升降舵的偏转来控制水平尾翼升力的大小和方向。当水平尾翼上产生的升力对飞机重心的力矩与飞机其他部件对飞机重心的力矩平衡时,可以保证飞机的俯仰平衡[15],使机翼与气流的攻角保持不变。此款新型无人帆船的翼帆结构,借鉴了飞机中通过尾翼升降舵控制飞机机翼迎角的结构设计。
1.2.2 翼帆设计方案
翼帆由主帆、尾翼和尾翼执行器组成,主帆为帆船的航行提供动力,尾翼控制主帆的旋转,并且维持主帆攻角的稳定。在设计初期,有如下两种控制翼帆迎风攻角的设计方案:
1) 在主帆桅杆处安装执行器来控制主帆的旋转,这具有快速启动的优点。但由于风向变化十分频繁,需要执行器频繁驱动,消耗较多的能量。
2) 控制攻角的结构是使用尾翼(与上文提到的飞机尾翼升降舵控制机翼的俯仰为同一原理)对主帆进行控制,通过尾翼控制主帆旋转如图4所示。同时,因为尾翼安装在主帆一侧,使主帆的质心偏移,需在主帆另一侧装备配平块对主帆进行质量平衡。
翼帆受力图如图5所示。由图5可以看出,翼帆与来流VA成α攻角,在主帆上产生了气动升力LW和气动阻力DW[16],其合力FA为帆船提供动力。同时,主帆还产生绕桅杆顺时针旋转的俯仰力矩MW,通过控制尾翼执行器,使尾翼与来流VA成δ攻角,尾翼在空气流场的作用下产生升力LF,升力LF绕桅杆产生的恢复力矩MF平衡主帆的俯仰力矩MW [17],使翼帆整体所受力矩为零。使用尾翼调整主帆的迎风角,只需要一个小型的电动推杆控制尾翼即可,同时尾翼在风向或者航向发生变化时,可以快速修正主帆的迎风角,这种调整功能是一种被动稳定的修正能力,有利于减小控制功耗。因此,选择第2种方案作为翼帆的结构设计方案。
综上所述,此款无人帆船主帆采用NACA 0021翼型,尾翼采用NACA 0018翼型,通过尾翼控制翼帆与来流的攻角。
1.3 无人帆船的航行
基于以上理论,在设计初期建造了一艘骨架为铝合金的双体试验船,试验船如图6所示。试验船船长3.5 m,船宽2 m,船高2.4 m。在航行测试中,试验船航行平稳,验证了翼帆设计的可行性。但试验船船速较低,翼帆相对较大,帆船整体质量较大,不易搬运。因此,对翼帆进行流体分析和优化设计,使翼帆具有较优的气动性能,同时帆船采用更轻、更坚固的碳纤维材料建造。
2 翼帆气动性能分析
2.1 有限元模型的建立
本文主要对翼帆的气动性能进行分析,进而设计出更合理的翼帆形状,为后续帆船推力优化和路径规划创造条件。主帆翼展为2 000 mm,弦长为500 mm,尾翼的大小初步设置为主帆大小的10%[18]。
2.2 网格划分
设置流体域的上下边界为主帆15倍的弦长,左右边界为主帆35倍的弦长[19]。为了提高计算精度与节省计算时间,对翼型区域网格进行加密处理[20]。网格划分示意图如图7所示。
2.3 Fluent有限元分析
翼帆攻角α为0~14°,流场流速设置为8 m/s,选用SST kω模型[21]在Fluent中进行模拟,并对翼帆中主帆的锥度比、展弦比、尾翼距离主帆上下左右的位置进行参数化处理。通过优化分析,最终确定翼帆的结构参数。其中,主帆的展弦比为5,在该展弦比下,主帆的气动性能比较优秀,同时不会因为过长的主帆而使弯曲应力过大;锥度比为0.45,锥形主帆有利于降低根部的弯曲载荷;尾翼的上下位置为主帆翼展高度的38%,左右位置为主帆翼展高度的一半,优化后的翼帆模型如图8所示。
将优化后的模型导入Fluent软件中进行分析,翼帆升力系数随攻角变化曲线如图9所示。由图9可以看出,随着攻角的变大,翼帆升力系数也在逐渐上升,在14°攻角时,升力系数达到1.37。
翼帆流场和翼帆表面压力云图如图10所示。由图10可以看出,翼帆空气流动平稳,并未出现涡流区,最大压力出现在主帆前缘,同时,表面压力呈平滑过渡现象,保证气流可以平稳的从主帆表面分离。
3 结束语
本文主要对某新型无人帆船的结构进行设计,并对翼帆气动性能进行分析。通过对比柔性帆与刚性帆的气动性能,得出刚性帆具有更好的气动性能及更高的效率,在实际航行中,选择对称翼型的刚性帆更适合帆船的实际航行要求。同时,采用尾翼控制翼帆旋转的控帆方式,可以降低控帆能量的消耗,通过对优化后的翼帆进行CFD分析,可以看出刚性帆的升力系数比传统柔性帆的升力系数大,且气流流动平稳,具有较好的气动性能,对后续帆船推力优化及路径规划具有一定的促进作用,同时推动了无人帆船在海洋探索方面的应用。但采用刚性帆使翼帆的重量增加,后续需要在保证翼帆气动性能的前提下,对翼帆内部结构进行轻量化设计。
参考文献:
[1] 彭飞, 富宁宁, 胡伟, 等. 国内外海洋资源研究知识图谱解析及启示[J]. 资源科学, 2020, 42(11): 20472061.
[2] 孙松, 孙晓霞. 对我国海洋科学研究战略的认识与思考[J]. 中国科学院院刊, 2016, 31(12): 12851292.
[3] 常继强, 蒲进菁, 庄振业, 等. 无人船在海洋调查领域的应用分析[J]. 船舶工程, 2019, 41(1): 610, 78.
[4] 罗潇, 刘旌扬, 王健, 等. 高性能无人帆船软硬件设计[J]. 计算机工程与应用, 2018, 54(9): 265270.
[5] 康梦萁, 许劲松, 徐建云, 等. 无人帆船短途路径规划研究[J]. 船舶工程, 2016, 38(9): 15.
[6] Ewa S, Rafal S, Marcin Z. Evolutionary multiobjective weather routing of sailboats[J]. Polish Maritime Research, 2020, 27(3): 130139.
[7] 沙宇. 三維软帆几何变形及空气动力学特性研究[D]. 哈尔滨: 哈尔滨工程大学, 2011.
[8] 马勇, 郑伟涛. 帆船帆翼空气动力性能数值模拟分析[J]. 船海工程, 2013, 42(1): 5759.
[9] 俞建成, 孙朝阳, 张艾群. 无人帆船研究现状与展望[J]. 机械工程学报, 2018, 54(24): 98110.
[10] 李冬琴, 郑鑫, 李季, 等. 可收缩式双尾襟翼帆设计及性能研究[J]. 江苏科技大学学报: 自然科学版, 2017, 31(6): 707713.
[11] He J H, Hu Y H, Tang J J, et al. Research on sail aerodynamics performance and sailassisted ship stability[J]. Journal of Wind Engineering & Industrial Aerodynamics, 2015, 146(8): 8189.
[12] 胡以怀, 李松岳, 曾向明. 翼型风帆的气动力学分析研究[J]. 船舶工程, 2011, 33(4): 2024.
[13] 何科杉, 石永超. 风力机智能叶片气动特性研究[J]. 制造业自动化, 2016, 38(3): 6163, 93.
[14] Alex L, Maziar A, Benjamin C, et al. Selfnoise of NACA 0012 and NACA 0021 aerofoils at the onset of stall[J]. International Journal of Aeroacoustics, 2017, 16(3): 181195.
[15] 劉惠超, 邹倩, 张燕, 等. 航模制作在飞行原理课程中的教学实践探索[J]. 济南职业学院学报, 2018(6): 4749.
[16] Park J S, Witherden F D, Vincent P E. Highorder implicit largeeddy simulations of flow over a NACA0021 aerofoil[J]. Aiaa Journal, 2017, 55(7): 112.
[17] 张明环, 马万超, 郭云鹤, 等. 具有鸭舵/尾舵多操纵面的导弹复合控制方法研究[J]. 西北工业大学学报, 2019, 37(5): 962967.
[18] 黄连忠, 林虹兆, 马冉祺, 等. 基于CFD的圆弧型风帆气动优化[J]. 中国航海, 2016, 39(2): 101105.
[19] 刘志刚, 管殿柱, 白硕玮, 等. 基于Fluent的无人帆船流体动力学分析[J]. 青岛大学学报: 工程技术版, 2019, 34(4): 5659.
[20] 黎作武, 贺德馨. 风能工程中流体力学问题的研究现状与进展[J]. 力学进展, 2013, 43(5): 472525.
[21] 李季. 风帆优化及助航船舶阻力特性的研究[D]. 镇江: 江苏科技大学, 2017.
