体感视觉综合防晕车座椅自主平衡装置设计
2021-07-20葛永帅吴延峰张翠韩星陈铭张龙
葛永帅 吴延峰 张翠 韩星 陈铭 张龙

摘 要:汽车作为重要的代步工具,为人们的出行提供了极大的方便,但是,随之而来的晕车发生率呈不断上升的趋势。本文针对乘客在汽车加速、转向、制动等工况下的运动刺激和乘客自身感觉冲突等晕动症诱发因素,设计一种体感视觉综合防晕车座椅自主平衡装置。该装置依靠座椅减震器和自动控制系统保持竖直和水平方向上的体感平衡,借助头戴式显示设备使得内耳前庭感受器与视觉感受到的信息一致,保持体感与视觉的协同平衡,从而达到综合防晕车的效果。
关键词:晕动症;防晕车座椅;阻尼可调节式减震器;头戴式显示设备
中图分类号:U463文献标识码:A文章编号:1003-5168(2021)04-0056-04
Abstract: As an important means of transportation, cars provide great convenience for people's travel. However, the incidence of carsickness is rising. Aiming at the motion stimulus of passengers under car acceleration, steering, braking and other conditions such as motion stimulus and passengers' own feeling conflicts and other motion sickness inducing factors, this paper designed a somatosensory and visual integrated anti-sickness seat autonomous balancing device. The device relies on the seat shock absorber and the automatic control system to maintain a balance in the vertical and horizontal directions, with the help of a head-mounted display device, the vestibular receptors of the inner ear are consistent with the visually sensed information, and the synergistic balance of somatosensory and visual is maintained, so as to achieve a comprehensive anti-motion sickness effect.
Keywords: motion sickness;anti-sickness seat;damping-adjustable shock absorber;head-mounted display device
近年來,随着国家经济的发展和人民生活质量的提高,人们对出行的舒适度要求越来越高,晕车成了影响部分人群出行体验的主要因素之一[1]。晕车是晕动症的一种,晕动症是由于肌体对运动状态错误感知所导致的一系列生理反应的总和,具体表现为呕吐、冒冷汗,并伴随严重的腹泻和头昏脑胀等[2]。据统计,有晕车症状的人数占总人数的4%~10%,因此,晕车问题成为亟待研究与解决的课题。目前,解决晕车主要依靠晕车药。市面上常见的晕车药有胃复安(甲氧氯普胺)片、吗丁啉片等。但研究表明,晕车药均具有副作用,同时其适用范围也有限。
2018年,法国汽车制造商雪铁龙推出了一款防晕车眼镜架。眼镜架上有四个环,环内部蓝色液体的水平面随着汽车的行驶也会发生变化。眼镜在视野正面及侧面创造了一条人造水平线,从而使视线和内耳重新同步,达到防晕效果。国内现有的防晕车装置主要有防晕后视镜、防晕神器Neueowave等。但经过测试,其只对部分人有效。
近年来,针对晕动症开发防晕座椅的研究不断涌现。肖梦婷等[3]研发的防晕车座椅主要通过增加或者减弱汽车座椅的频率,使得此频率不在与人体发生共振的频率范围内,进而消除共振;白云等研发的防晕车座椅通过穴位按摩和气囊换气的形式缓解晕动症,但并未从根源上解决问题[4]。本文结合防晕座椅与防晕眼镜的优点,设计出了一种体感与视觉协同平衡的防晕装置,达到综合防晕车的效果。
1 整体设计
座椅装置借鉴半主动悬架和直升机倾斜盘的原理,能够根据车辆行驶的具体工况,主动抵消振动,产生相应的倾角,以保持体感平衡、减弱运动刺激。同时,可配合虚拟现实头戴式显示设备,使内耳前庭感受器与视觉接收的信息一致,达到体感、视觉协同平衡的效果。靠背和靠枕部分的结构和材料也能起到减振和固定的效果。
2 体感平衡设计
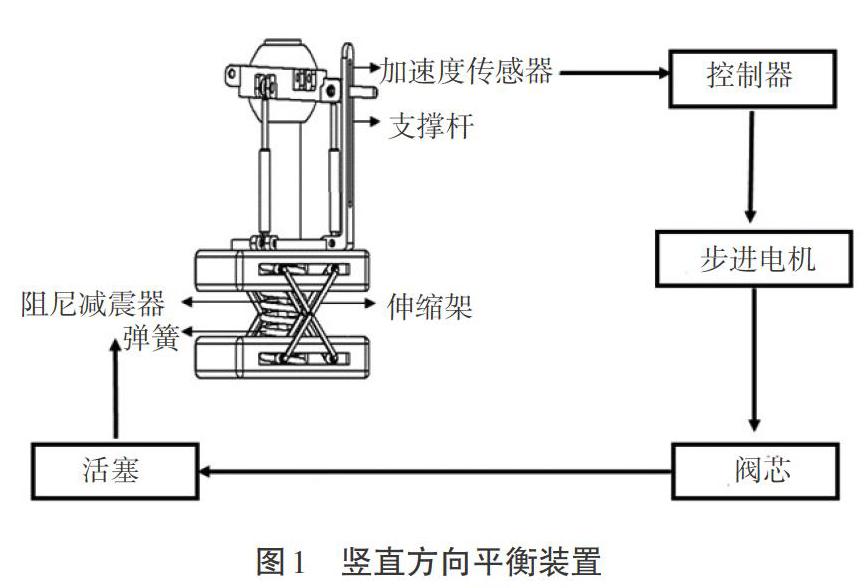
体感平衡通过汽车传感器实时采集车辆速度、加速度、角速度等数据,利用半主动悬架的原理主动减弱垂直方向的振动,通过调整座椅的倾角反向抵消变工况条件下车的惯性加速度,从而保持水平方向的平衡,达到减弱运动刺激的效果。该装置的结构如图1所示。
2.1 竖直方向平衡装置设计
为减小竖直方向上的加速度,本设计采用阻尼有级可调的半主动悬架来主动抵消竖直方向的振动。竖直方向平衡装置主要由不可变刚度的弹簧和节流口可调的阻尼减震器组成。弹簧用来减缓冲击力,减震器产生可变的阻尼力使振动能量迅速消散,减小甚至消除座椅的振动。安装在支撑柱上的加速度传感器实时采集竖直方向的加速度数据并将信息传递给控制器,根据模糊控制得出的控制量,控制器向步进电机发出控制脉冲,由步进电机驱动阀芯改变节流口的开度,使活塞上下腔的节流面积发生变化,从而调节减震器的阻尼状态。外围采用平行四边形连杆铰接的伸缩架,提高座椅稳定性的同时也能起到一定的减振效果。
2.2 竖直方向平衡控制方案
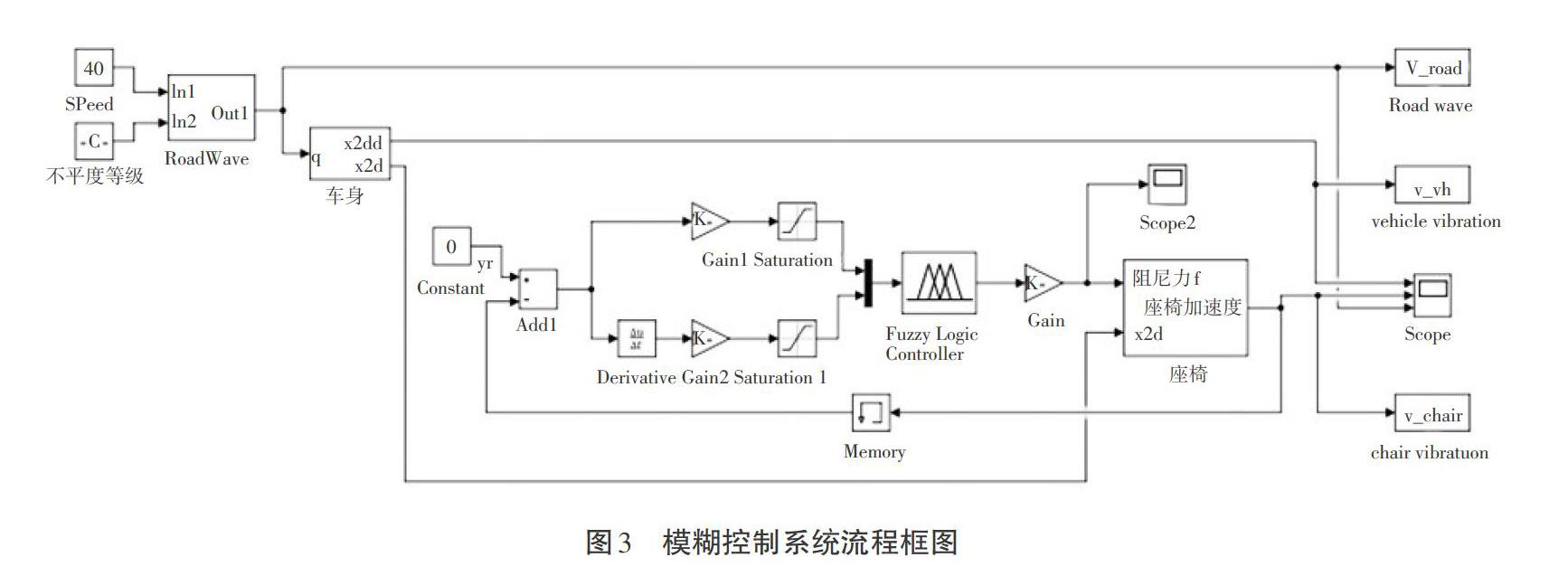
对于减震器阻尼大小的控制方式,本装置采用模糊控制。模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的计算机智能控制。其基本原理框图如图2所示。
模糊控制器选用二维模糊控制器,根据竖直方向的加速度传感器提供的加速度[a],选取竖直方向的加速度与参考模型的加速度([a]=0)差值作为控制器输入变量[e],差值的变化率为第二个输入变量[ec],节流口开度为输出变量[u]。模糊控制器输入的误差量、误差变化率和输出均取7个语言值:正大(PB)、正中(PM)、正小(PS)、零(ZE)、负小(NS)、负中(NM)、负大(NB)。本研究使用三形隶属度函数作为输入、输出变量的隶属度函数。[e]、[ec]、[u]的基本论域分别为[-3,3]、[-6,6]、[0,6]。输入、输出变量均具有7个模糊子集,根据专家的经验知识和半主动悬架的控制规则,总共有49条模糊规则。该模糊控制器的流程框图如图3所示。
解模糊化是模糊化反过程,其作用是从已知的连续输入精确量中求出控制器相应的输出量。本装置采用重心法,具有控制效果良好、易于求解等优点,可将具有不同隶属度的模糊输出元素合成一个实际的控制量[U]。
通过MATLAB Simulink仿真,输入随机路面模型,车速为40 km/h,座椅垂直方向振动加速度如图4所示。由图4可知,座椅的垂直加速度可控制在0.01g的范围之内,不超过耳石器对垂直加速度的生理阈值,不会引起强烈的耳石刺激。下面对座椅振动频率进行分析,结果如图5所示。该座椅的频率大于0.5 Hz,超过多发性硬化(Multiple Sclerosis,MS)发病率相对较高的晕动性峰值运动频率0.2 Hz[5-6]。
2.3 水平方向平衡装置设计
为了抵消俯仰和侧倾产生的水平方向的惯性加速度,以保持座椅水平方向的体感平衡,本研究借鉴直升机倾斜盘的原理,设计了一种调平机构,使得该装置主动保持变工况时座椅的平衡,其结构简图如图6所示。
调平机构主要由支撑座、两个液压伸缩杆、球关节、倾斜盘和卡槽组成。中间设计一个支撑柱,其上部是一个球关节,液压伸缩杆与球关节通过倾斜盘相连,倾斜盘置于球关节上,可在两个液压伸缩杆的带动下围绕球关节转动,产生一定的倾角,同时支撑座上设有卡槽,可限制伸缩杆水平方向转动的范围,以保证座椅的稳定性。
通过组合式加速度传感器、车速传感器、光电式转角传感器、制动踏板传感器、陀螺仪传感器等相互配合,该装置实时采集或提前预判车辆的速度、加速度、角速度等信息,控制器可根据传感器提供的数据控制两个液压伸缩杆的伸长量,使与其连接的倾斜盘绕球关节产生一定倾角,带动座椅产生一定的倾角,从而抵消变工况下的惯性加速度,使座椅保持水平方向的平衡[7]。
2.4 水平方向平衡方案
下面将介绍四种代表工况下座椅的调整方案。
2.4.1 正常行驶工况。图6为初始状态下的水平方向平衡装置结构图,此时,座椅平面与地面平行,即倾斜盘平面与地面平行,两伸缩杆长度均为原始长度[L],倾斜盘中心到伸缩杆的距离为[R]。该装置不工作。
2.4.2 紧急制动工况。根据传感器实时提供的数据,可得到预测和即时的加速度以及惯性加速度[a惯],座椅平面与正常行驶工况下水平面之间的夹角为[α]。根据力的平衡原理,可得:
2.4.4 急转弯工況。急转弯工况示意图如图8所示。根据传感器实时提供的数据可得预测和即时的加速度和惯性加速度[a惯],此时,杆2长度保持不变,根据式(2)和式(5),向左转向时,杆1长度缩短[ΔL′],向右转向时,杆1伸长[ΔL′]。
2.4.5 急转弯+制动综合工况。根据紧急制动工况和紧急转弯工况下杆1和杆2的变化,左转+制动时,杆1缩短[ΔL'],杆2缩短[ΔL]。右转+制动时,杆1伸长[ΔL'],杆2缩短[ΔL]。
3 视觉平衡设计
为保持体感、视觉协同平衡,乘客可自主选择佩戴虚拟现实头戴式显示设备,即VR眼镜。对于不同的路况,屏幕中对应播放不同的画面,画面采用模拟路况动画,控制信息存储在电子控制单元(Electronic Control Unit,ECU)中。在车辆行驶过程中,通过汽车安装的传感器,将信号实时传输给ECU,ECU输出相应控制指令,再将信号反馈给VR眼镜,利用人眼看到屏幕配合眼镜根据路况实时生成的立体3D图像,使得内耳前庭感受器与视觉感受到的信息一致,不易产生晕车的症状。例如,在汽车启动时,VR眼镜中播放周围环境缓慢倒退的画面;汽车制动时,会播放短暂的制动时周围环境缓慢倒退的画面;在上下颠簸时,也会有环境的抖动画面;在转向等其他路况下,也有相应的画面播放。
4 靠背、靠枕设计
依据人体工程学原理,靠背部分结构设计成弧线形,有效释放压力。材料采用记忆海绵,记忆海绵之间设有镂空部分,形成减振空间,减弱行驶时车辆的振动通过座椅传递到与腰椎相关联的胃部,缓解胃部不适等症状[8]。座椅的整个支架采用丙烯腈-丁二烯-苯乙烯共聚物(Acrylonitrile Butadiene Styrene,ABS)制作,可以减轻重量,同时方便加工。
靠枕的结构为两边突出、中间凹陷的形状,能够对头部起到一定的限制作用。同时,其可以使人的颈椎得到较好的放松。
5 结论
本文针对晕动症人群设计的一种体感视觉综合防晕车座椅自主平衡装置,不仅减弱了能够诱发敏感人群晕动症的运动刺激,还将眼镜和座椅相配合,根据晕动症发病机制,从多方面、多角度考虑了晕车问题的解决办法。该装置还未在现实生活中实践,若将设计具体细节加以完善,使其成为技术成熟的产品,定将为乘车出行的晕动症人群做出贡献。
参考文献:
[1]何云敖,郑显华,周珊,等.关于防晕车座椅的介绍[J].科技风,2019(13):144.
[2]闫林,许锋,王修建,等.一种防晕车座椅:CN201520931885.7[P].2016-04-20.
[3]肖梦婷,李程.一种防晕车座椅:CN2017103 29174.6[P].2017-05-11.
[4]白云,李川.一种防晕车座椅:CN201721671270.0[P].2017-12-05.
[5]马娇,朱炎,王建锋,等.基于MATLAB的汽车主动悬架模糊控制系统仿真[J].现代商贸业,2018(21):194-196.
[6]徐晓美,郑燕萍.汽车半主动悬架系统模糊控制仿真研究[J].科学技术与工程,2010(29):7202-7205.
[7]陈铭,吴延峰,张龙,等.一种防晕车用自主平衡座椅:CN202010360084.5[P].2020-04-30.
[8]张兵.防晕车座椅:CN201520392008.7[P].2015-06-09.
