APP下载
搜索
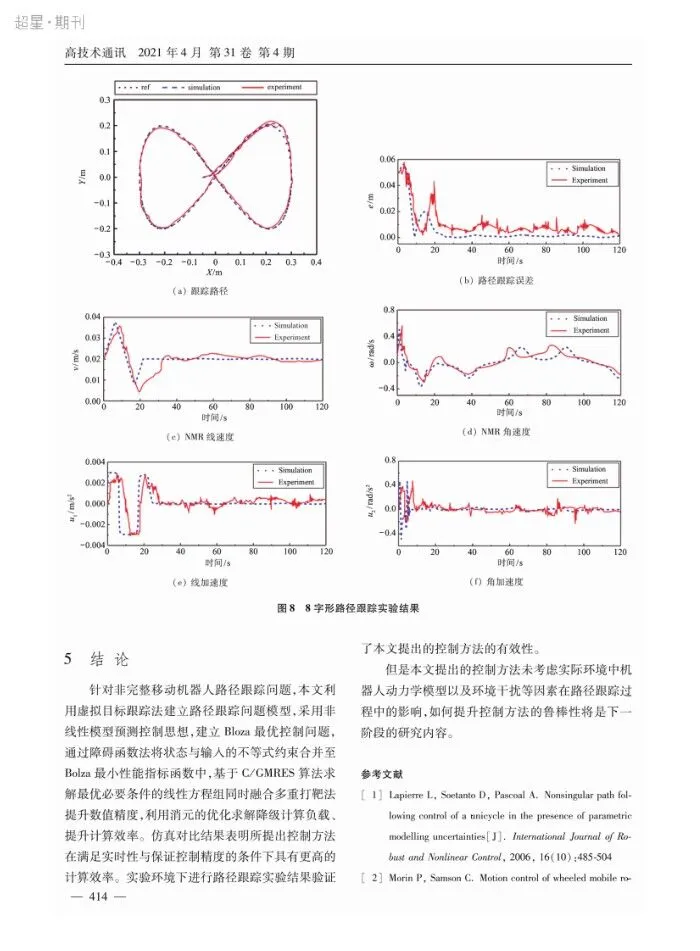
非完整移动机器人路径跟踪的快速非线性模型预测控制方法
2021-07-20
占红武,厉晟,胥芳
高技术通讯
订阅
2021年4期
收藏
关键词:
移动机器人
预测
方法
猜你喜欢
移动机器人
预测
方法
无可预测
移动机器人自主动态避障方法
选修2-2期中考试预测卷(B卷)
选修2-2期中考试预测卷(A卷)
基于Twincat的移动机器人制孔系统
不必预测未来,只需把握现在
可能是方法不对
用对方法才能瘦
四大方法 教你不再“坐以待病”!
捕鱼
杂志排行
《师道·教研》
2024年10期
《思维与智慧·上半月》
2024年11期
《现代工业经济和信息化》
2024年2期
《微型小说月报》
2024年10期
《工业微生物》
2024年1期
《雪莲》
2024年9期
《世界博览》
2024年21期
《中小企业管理与科技》
2024年6期
《现代食品》
2024年4期
《卫生职业教育》
2024年10期
高技术通讯
2021年4期
高技术通讯
的其它文章
《高技术通讯》作者投稿指南
基于专利数据的我国钛铝合金材料发展态势研究
基于改进禁忌搜索算法的整车混装配载优化方法
基于发布订阅的实时交互平台NetDDS的设计与实现
OBD支持下公交车到达时间的回归预测方法
人手操作目标物体过程运动轨迹的规律研究