基于重要指示变量和特征的高速公路浓雾短临预测研究
2021-07-19杨小兵杨再均李洋洋
杨小兵,杨再均,韩 晖,李洋洋
(1.云南建投基础工程有限责任公司,云南 昆明 521452; 2.贵州高速黔通建设工程有限公司,贵州 贵阳 550000; 3.北京中交华安科技有限公司,北京 100088)
0 引言
浓雾天气对高速公路的运营安全产生严重影响,极易引发道路交通事故。全国每年高速公路平均交通事故死亡人数近12万人,其中与交通气象相关的约占70%[1-2],且因大雾诱发的交通事故大部分为重大交通事故,损失最为严重[3]。同时,近年来全球气候变暖加剧,国内区域气候浓雾下能见度整体呈现下降趋势,尤其中东部地区[4-5],低能见度天气已成为危害行车安全的重要因素之一。因此,准确的浓雾产生预测能够有效减少交通事故的发生。
雾是由悬浮在近地面空气中微小水滴和冰晶组成的低能见度的天气现象[6],其形成受到冷却条件、水汽条件、凝结条件、天气条件、层结条件、风力等因素的影响和约束[7-9],对各个气象要素参数的要求苛刻至极[10]。
对于高速公路浓雾产生预测研究上,贺皓等根据雾产生前地面的气象要素信息,利用支持向量机的方法进行短临预测,并取得了不错的效果[11];周须文等应用天气学原理和数理统计方法对低能见度雾的生消机理进行研究,建立能见度气象因子的回归方程,进而实现对浓雾的预测和预报[12];王月琴等通过采集高速公路部分气象站点检测的数据作为样本,建立基于BP神经网络的高速公路团雾产生预测模型[13];苗开超等基于LSTM网络构建了全新的大雾临近预报框架,实现对大雾临近进行有效的预测[14];此外,数值预报模式也越来越多地被应用到低能见度的模拟和预报中[15-17]。
综上,现有的浓雾预测和预报研究中,大多为短期区域性的预测,其准确率和精度相对较差。而针对高速公路的行车特点,浓雾临近/短临预测和预报对于保障交通的安全运行尤为重要,为此,本研究在现有研究成果和大数据技术广泛应用的基础上,基于交通气象监测站的历史数据,利用统计分析方法确定浓雾形成的重要指示变量和变化趋势,构建了基于“能见度前期振荡”和“大气温度回温波动”特性的浓雾短临预测模型,实现对浓雾产生前短时间内的有效预测。
1 历史气象数据处理
依托沪宁高速公路沿线江苏境内窦庄、河阳、仙人山等3处交通气象监测站4年(2013年1月1日至2016年12月31日)全天候的监测数据(包括时间、能见度、大气温度、相对湿度、风速风向、降水量等数据信息,数据采样间隔为1 min)进行研究。
综合考虑高速公路行车安全的实际需求,结合数据分析的结果,本研究选取了能见度数值为200 m[18]作为分界阈值点,研究浓雾产生前后各气象要素的变化情况,具体过程如下:
(1)数据提取
根据本研究目的,提取浓雾产生前3 h的气象数据来分析浓雾产生过程中各气象要素的变化特性、趋势和规律。但受目前交通气象监测设备数据采集质量影响,存在部分时段数据异常和缺失的状况,导致在非浓雾产生时段中出现少量数据单元存在能见度低于200 m的状况,或在浓雾时段会存在个别数据单元能见度远大于该时段其他数据的状况。
本研究以气象数据单元的采样时间序列为基准,利用“滑动窗+模糊统计”方法对各数据单元进行处理。浓雾产生后会持续一定的时间,通过对浓雾产生前3 h数据进行统计分析,发现浓雾产生前跨度为连续2 h的数据会出现至少一次相同的变化趋势,故设定滑动窗窗体大小为120个数据单元即2个小时。
为提升数据提取的准确性和速度,采用双约束并列关联提取的方式,具体操作如下:
确定当前位置的滑动窗A={xi,xi+1,…,xi+118,xi+119},判断当前位置能见度持续时长:
(1)
式中,K为滑动窗决策变量,取值为0或1;N为模糊统计数量阈值,本研究通过对气象数据进行统计分析后其取值为48;NA为滑动窗子窗体A中能见度小于200 m的数据单元个数。
当K=0时,对滑动窗A内部数据单元进行约束条件判定,选取滑动窗A中前60个元素即Ai={xi,xi+1,…,xi+59}进行约束条件判定:
(2)
若K=0,滑动窗Ai向前滑动1个数据单元长度,继续进行判断,直至子滑动窗遍历整个滑动窗A;当K=1时,确定当前滑动窗首元素位置i,分别提取当前位置前3 h数据单元元素即{xi-180,xi-179,…,xi-1},同时为验证整体的浓雾产生前后的变化过程,并提取其对应位置后2 h数据单元元素即{xi,xi+1,…,xi+119},此时滑动窗向前滑动2个窗体A的长度即300个数据单元长度。
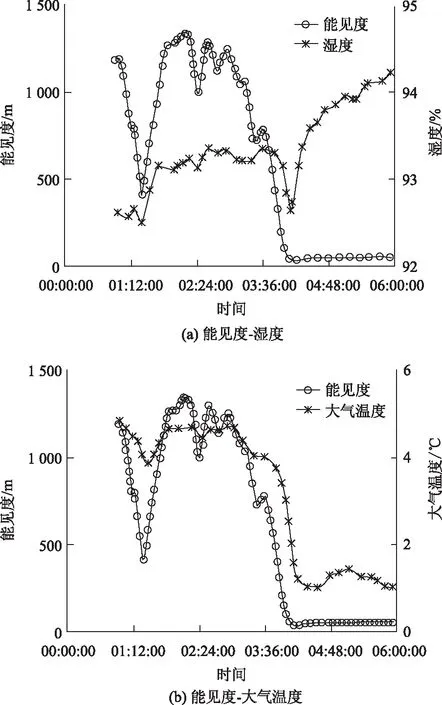
图1 提取数据结果Fig.1 Result of data extracting
(2)数据剔除及修复
受交通气象监测站硬件数据采集精度和所处气候环境的影响,采集的气象数据会存在部分时间点的数据丢失问题,本研究为保障所建短临预测模型的准确性,对于数据缺失较为严重的样本进行直接剔除。

图2 数据缺失情况Fig.2 Situation of data missing
对于获取的数据存在个别数据点异常或遗漏,本研究选用滑动窗和线形插值的方法对气象数据进行数据异常值修复。
首先,浓雾的产生与消散过程是一个缓慢的过程,所以相邻数据单元间其气象监测数据的差异也是在一定范围内波动的。通过对气象站监测数据的统计分析发现:低能见度情况下,随着能见度的降低,相邻数据单元的能见度差值整体上呈现减小的趋势;当能见度小于等于2 000 m时,相邻数据单元间能见度值的差异约90%集中在小于等于200 m。本研究选定在低能见度下能见度差值阈值δ作为异常数据判定的依据,取δ=200。
其次,根据获取数据的整体情况,为保证数据修复过程的合理性和准确性,本研究利用线性插值方法对数据序列中的异常数据、缺失数据进行修复。具体修复过程如下:
(3)
式中,xi为第i个数据单元;Dxi为第i个数据单元的原始能见度值;D′xi为第i个数据单元的修复后能见度值。
最后,利用相同的方法对提取时间段内数据单元的其他要素数据进行异常数据值进行处理和修复,如温度、湿度等,得到能够体现浓雾产生过程的各气象要素数据集。
2 重要指示变量分析
(1)浓雾产生过程中重要指示变量选取
实现对浓雾产生有效预测最为关键的是选取重要指示变量和分析变量的变化趋势和规律特点。本研究所采用的沪宁高速公路沿线江苏境内交通气象监测站历史数据的指标变量共计13项,包括时间、能见度、大气温度、相对湿度、降水量、瞬时风速、瞬时风向、2 min风速、2 min风向、10 min风速、10 min风向、0 cm地温、10 cm地温,而从数据的整体有效性和数据的准确性来看,仅时间、能见度、大气温度、相对湿度、降水量、瞬时风速的监测结果较为准确。
根据目前浓雾预测研究所采用的气象变量指标和结果,本研究所采用的数据可以满足对浓雾产生进行短临预测的需求,同时结合本研究目的,选取了能见度、相对湿度和瞬时风速作为浓雾短临预测模型的重要指示变量。
(2)浓雾产生过程中重要指示变量统计分析
通过对沪宁高速公路沿线江苏境内交通气象监测站的历史数据进行预处理获得浓雾产生前后各气象要素数据,进而利用MATLAB工具对其数据进行统计分析来获取相关重要指示变量在浓雾产生过程中的特点,具体结果见表1所示。
通过表1和图3可以发现:在浓雾产生的整个过程中,大气相对湿度、风速、能见度等相关气象因子变化均具有一定的规律和特点。当浓雾逐渐形成的过程中,大气相对湿度整体处于85%以上,风速的大小在一定小范围内浮动变化([0,4]m/s),且
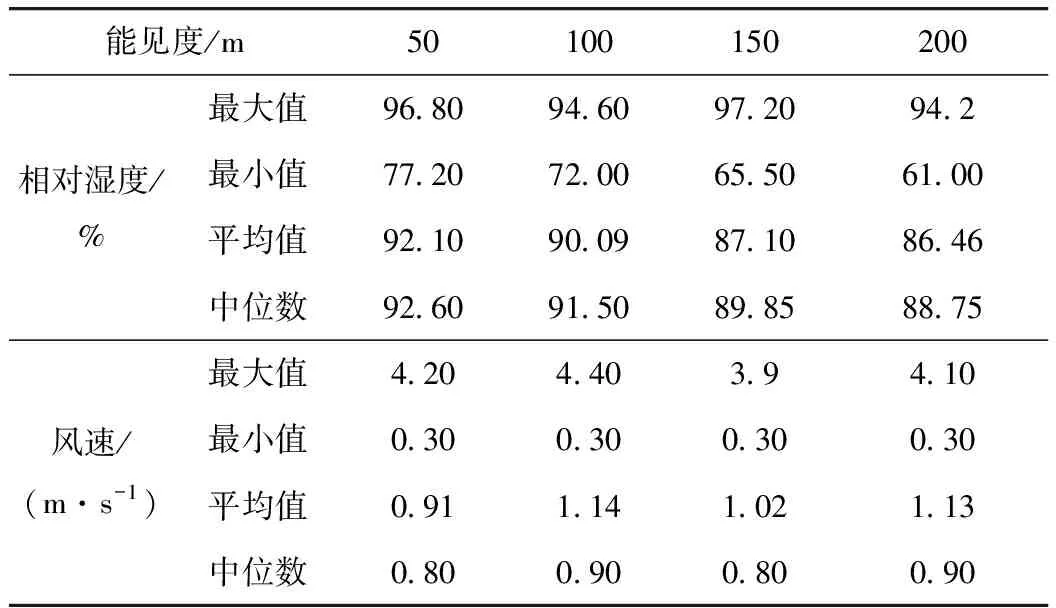
表1 不同浓度条件下的浓雾各指示变量分布的情况Tab.1 Distribution of dense fog indicator variables under different concentration conditions

图3 浓雾产生过程中重要指示变量的变化情况Fig.3 Changes of important indicator variables in dense fog generation process
普遍偏低,主要集中于1 m/s左右;随着环境的能见度逐渐降低,大气相对湿度逐渐增加,当浓雾产生后,其环境的能见度等指标逐渐趋于稳定、下降趋势减缓,湿度的上升趋势也减缓。
(3)浓雾产生过程中重要指示变量变化特点分析
根据沪宁高速公路沿线江苏境内交通气象监测站历时数据的分析结果及现有研究成果,可以发现:浓雾形成前近地层空气中空气湿度近乎达到饱和态,其能见度的降低不都是逐渐降低的,浓雾在产生之前,普遍会出现一个前期振荡。前期振荡现象是突然出现的,持续时间短,能见度值不低,也不稳定,一般介于200~800 m之间波动,这可被视为突发性浓雾的前奏,本研究称之为能见度前期振荡,如图4所示。

图4 能见度前期振荡Fig.4 Visibility early oscillation
能见度前期振荡具有以下两个特征:
(1)从ta到tb的时间大多在10~40 min之间,从tc到出现持续浓雾的时间大约是2~3 h;
(2)前期振荡是突然出现的,但能见度值在一定范围内变化。
此外,低能见度稳定浓雾天气过程在形成前存在先期振荡,表明突发性浓雾的形成不是一次完成的,究其成因是近地层大气中初次产生凝结后,存在凝结潜热释放的物理过程,加上雾对地面辐射的阻隔,使近地层的气温有所上升。研究表明[19]:稳定浓雾在爆发性下降前,大气温度都经过了“下降-小幅回升-继续下降”的过程,本研究称之为大气温度回温波动,如图5所示,温度下降过程中的小幅上升对能见度的突然下降有很好的预测作用。

图5 大气温度回温波动Fig.5 Atmospheric temperature return fluctuation
大气温度回温波动具有以下特征:
(1)大气温度波动的幅度在一定范围内波动;
(2)从ta到tb的时间大多在10~40 min,从tb到出现持续浓雾的时间30 min~3 h不等。
3 基于“能见度前期振荡”和“大气温度回温波动”特性的浓雾短临预测模型
基于沪宁高速公路沿线江苏境内交通气象监测站数据分析结果:在能见度爆发下降前相对湿度和风速大小的波动情况具有一定的规律特点,为此在进行浓雾短临预测时必须先满足两个先决条件即:
(4)
式中,Humi为当前时刻i的相对湿度;Windi为当前时刻i的风速;Nhum,Nwind分别为预测模型先决条件阈值。
在满足当前时刻先决条件阈值约束的基础上,本研究利用滑动窗口算法设定数据实时处理分析过程,并基于能见度前期振荡辨识算法和大气温度回温波动辨识算法对浓雾产生前的双特性变化趋势进行辨识,进而实现对浓雾产生前有效预测。
(1)滑动窗口算法
本研究利用滑动窗口算法对能见度前期振荡辨识算法和大气温度回温波动辨识算法的遍历规则进行了设定,具体步骤如下:

图6 滑动窗口算法示意图Fig.6 Schematic diagram of sliding window algorithm
Step1:研判周期确定及数据预处理
以气象站当前时间ta获取的数据单元为基准,往前选择一个时间点tc,ta至tc形成一个研判周期时长定义为cycle;利用本研究数据预处理方法对研判周期内的数据进行处理。
Step2:研判周期内数据整体性约束判别
为提升研判的准确性,需确定周期cycle中所有数据单元的整体水平进行先验处理,即
(5)

Step3:滑动窗体确定
在cycle内选择一个时间点tb,形成一个时间窗口定义为window,能见度前期振荡和大气温度回温波动辨识在window内执行,根据两个现象出现的特征,确定window时间长度。
Step4:窗体滑动规则
window在cycle内依次遍历,每次往前推进一个短时间段,这个时间段为滑动时间步长,定义为step,step时间长度为一个数据单元长度;直至window遍历完整个cycle,判定此次预测过程结束。
(2)能见度前期振荡辨识算法
根据能见度前期振荡的特征,判定:
(6)
式中,Svis为能见度前期振荡特性决策变量,取值为0或1;VIS_MAX,VIS_MIN分别为能见度前期振荡上限值和下限值;VISmin,VISmax分别为能见度滑动窗window内数据序列的平均能见度最大值和平均能见度最小值。
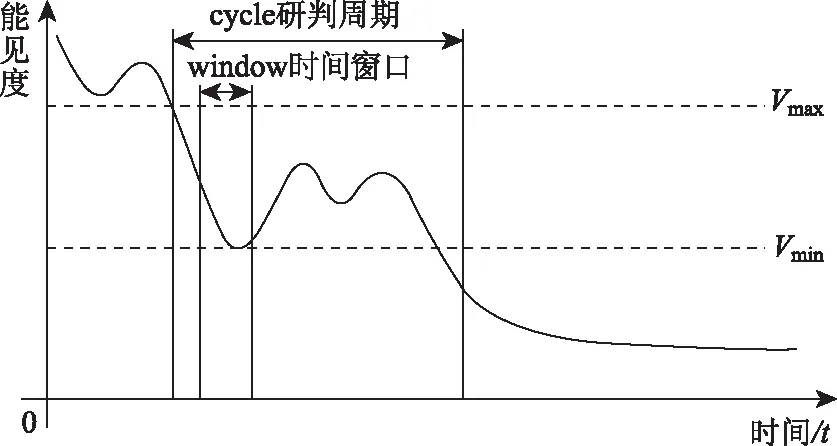
图7 能见度前期振荡辨识算法示意图Fig.7 Schematic diagram of identification algorithm of visibility early oscillation
其中:
(7)
式中,VISmax1,VISmax2分别为能见度滑动窗window内数据序列中两个最大能见度值;VISmin1,VISmin2分别为滑动窗window内能见度数据序列中两个最小能见度值。
(3)大气温度回温波动辨识算法
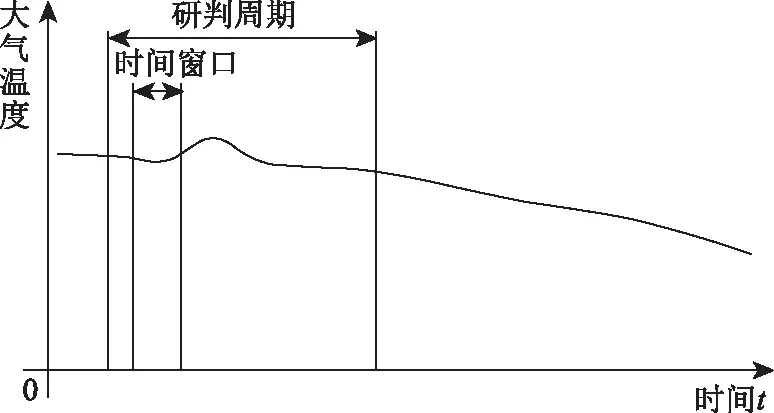
图8 大气温度回温波动辨识算法Fig.8 Schematic diagram of identification algorithm of atmospheric temperature return fluctuation
根据大气温度回温波动的特征,判定:
(8)
式中,Tat为大气温度回温波动特性决策变量,取值为0或1;AT_RANGE为大气温度回温波动的幅度;ΔAT为大气温度滑动窗window内数据序列中平均最大温差;Tmax1,Tmax2分别为大气温度滑动窗window内数据序列中两个最大温度值所对应的时间;Tmin1,Tmin2分别为滑动窗window内能见度数据序列中两个最小温度值所对应的时间。
其中:
(9)
式中,ATmax1,ATmax2分别为大气温度滑动窗window内数据序列中两个最大温度值;ATmin1,ATmin1分别为大气温度滑动窗window内数据序列中两个最小温度值。
综上,当能见度前期振荡辨识结果和大气温度回温波动辨识结果满足:
(10)
判定当前时刻未来1~3 h内将会产生浓雾。
4 模型参数标定及应用效果分析
基于沪宁高速公路沿线江苏境内3个交通气象监测站2013—2016年的历史数据,提取出其浓雾产生后能见度小于200 m且持续稳定的浓雾产生时前3个小时的数据单元,进而对提取数据进行预处理,共计获得有效数据组128组,其中2013—2015年共计105组,2016年共计23次组。为实现对基于“能见度前期振荡”和“大气温度回温波动”特性的浓雾短临预测模型的参数标定和应用效果分析,本研究将2013—2015年共计105组浓雾产生前3 h的数据作为样本数据用于模型参数的标定,进而根据模型标定结果对2016年的气象数据进行浓雾短临预测辨识,通过对比模型辨识结果和真实数据结果来验证模型的有效性。具体如下:
(1)模型条件阈值确定
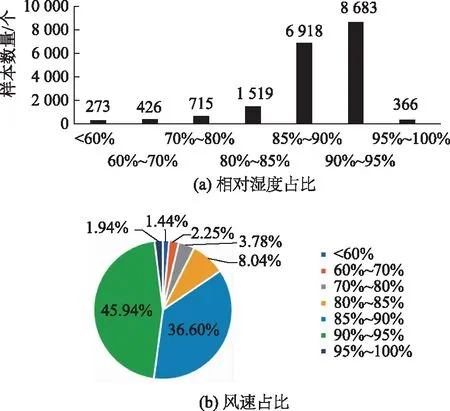
图9 2013—2015年浓雾产生前3 h相对湿度统计Fig.9 Statistics of relative humidity 3 h before occurrence of dense fog in 2013—2015
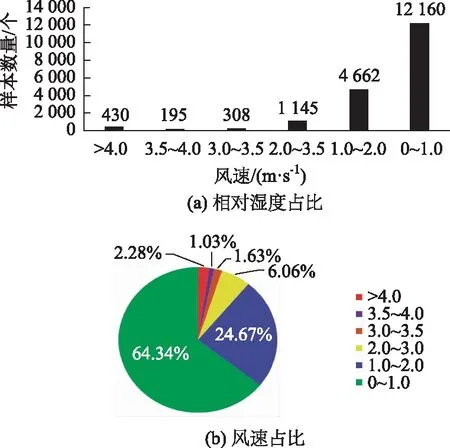
图10 2013—2015年浓雾产生前3 h风速情况Fig.10 Statistics of wind speed 3 h before occurrence of dense fog in 2013—2015
通过对2013—2015年历史数据的整体统计分析:浓雾发生前3 h相对湿度在85%及以上的比例达到84.48%,相对湿度在80%及以上的比例达到92.52%;而风速在3 m/s及以下的比例达到95.06%。为此,本研究对于模型先决条件阈值确定上选择:
(11)
而对于滑动周期cycle内数据单元的整体性水平约束阈值的确定上,本研究分别对各组数据进行整体性分析,分析结果如表2所示。

表2 浓雾产生前相对湿度和风速的整体性水平Tab.2 Overall level of relative humidity and wind speed before occurrence of dense fog
通过表2所统计出的结果,在满足整体性水平较好同时需要能够保证预测结果准确性,对滑动窗cycle设定为150 min,对整体性水平约束阈值设定为:
(12)
(2)模型辨识算法参数确定
对于能见度前期振荡和大气温度回温波动辨识算法相关参数的确定上,本研究直接对已提取的105组浓雾产生前其能见度和大气温度的变化趋势进行提取,获取各组数据中距离当前时刻最近的能见度前期震荡位置点和大气温度回温波动位置点的实际波动情况,进而进行统计分析得到如下结果。

图11 2013—2015年浓雾产生前能见度前期震荡和 大气温度回温变化情况Fig. 11 Changes of visibility early oscillation and atmospheric temperature return fluctuation before occurrence of dense fog in 2013—2015
通过对105组数据的浓雾产生前的能见度前期震荡和大气温度回温统计(图10)可以发现:浓雾产生前会出现明显的能见度前期震荡和大气温度回温波动的情况,同时波动产生的时间点和波动值具备一定分散性,但同时也具备一定的变化规律,能见度极小值主要集中在200~800 m之间,而极大值主要集中在500~1 400 m之间,同时二者的差值主要集中在250~650 m之间;能见度振荡持续时长在10~40 min,大气温度回温波动在0.2~0.9 ℃。
基于此,单一且固定的模型参数变量难以让模型获取准确而又确定的辨识结果,为此本研究采用序列式模型参数用于模型辨识,即
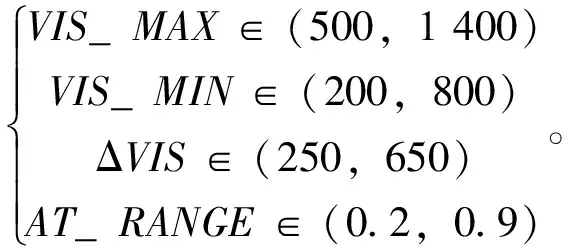
(13)
而对于滑动窗window的确定上,根据对数据分析的结果,本研究选择能够满足85%的数据组需求的值定为滑动窗的大小,即滑动窗window为30。
在此基础上,本研究进而利用MATLAB处理工具对沪宁高速公路沿线江苏境内3个交通气象监测站2016年数据进行浓雾产生短临预测,共获取数据组共计29组,其中与2016年真实数据相匹配数据共计22组,有效率达到75.86%,而漏检率仅为4.35%。
综上,本研究基于能见度前期振荡特性和大气温度回温波动特性的浓雾短临预测模型可以有效的对浓雾进行短临预测,同时预测结果与模型参数密切相关,结合实际的历史数据选定合适的模型参数对模型预测的准确率有重要的影响。
5 结论
通过对沪宁高速公路沿线江苏境内交通气象监测站获取的数据进行统计分析,发现浓雾发生过程中环境能见度、大气温度、相对湿度、风速等重要指示变量对高速公路沿线浓雾短临预测具有较好的指示意义。基于此,本研究利用滑动窗口算法,结合沪宁高速公路沿线交通气象历史数据的分析结果,提出了基于能见度前期振荡特性和大气温度回温波动特性的浓雾短临预测模型,实现了基于当前时刻气象数据及其历史数据对浓雾产生进行有效的短临预测,能及时警示公路运营管理部门提前做好预防处理准备,降低因突发浓雾而造成的交通事故发生的概率。
当然,本研究尚存在不足和需要改进的地方,具体总结如下:
(1)本研究预测模型参数标定的数据样本有限,使得模型的预测准确率受限;
(2)预测模型参数标定结果与地区气象数据密切相关,未来研究需融入模型反馈机制,构建模式库建立多模式模型参数匹配机制来提升模型的应用性和预测准确性;
(3)本研究对于浓雾短临预测因素仅考虑了能见度、大气温度、湿度和风速等影响,未来可以增加其他因素对浓雾短临预测的影响,从而提升预测准确率。