舵速对电动船Williamson回转性能的仿真分析
2021-07-19王五桂陈晗鸣
王 森,王五桂,陈晗鸣,张 祥
舵速对电动船Williamson回转性能的仿真分析
王 森1,王五桂2,陈晗鸣2,张 祥2
(1. 海装驻上海地区第一军事代表室,上海 201913;2. 中国舰船研究设计中心,武汉 430064)
针对电动船操纵运动控制问题,研究舵速对电动船Williamson回转性能的影响。通过建立非线性四自由度模型和分析影响电动船回转性能主要参数,建立仿真模型,研究舵速对Williamson回转运动的影响。仿真结果表明:电动船在进行Williamson回转运动时,随着舵速越快,电动船回转性能越好,纵距和横距越小,回转所需的时间越小。仿真结果对电动船操纵性预报和总体性能设计可提供一定理论依据。
电动船 舵速 数学模型 回转性能
0 引言
电动船采用新能源作为动力,主要由动力源、配电系统、能量管理系统等组成,集多种新技术于一体,且具有优良的操纵性能[1]。文献[2]通过建立三自由度数学模型和搭建自航模试验系统,采用数字仿真和水池试验相结合的方法,对不同舵速下对船舶Z型运动进行了对比分析。文献[3]从舵鳍联合控制需求出发,基于现有低速舵机现状,提出一种低舵速下舵减摇控制技术,可有效避免频繁打舵,避免舵机加速磨损。文献[4]研究了低舵速操舵控制方法,有效减低操舵噪声。文献[5]对分析了不同舵速对船舶回转运动性能的影响。
本文针对Williamson回转这种典型的电动船操纵运动,首先建立电动船的非线性四自由度模型,并且探讨分析了影响电动船回转性能主要参数,通过建立仿真模型,进行了舵速对Williamson回转运动的仿真,仿真结果对电动船操纵性预报和总体性能设计可提供一定理论依据。
1 电动船回转运动模型建立
电动船跟常规船舶一样,其运动中存在诸多非线性因素,特别在回转运动中这些非线性因素的影响更加强烈。因此针对回转运动的仿真采用的是船舶运动非线性模型。考虑到回转运动中纵荡速度将有较大的变化,故建立的包括纵荡、横荡、横摇、艏摇在内的四自由度非线性运动模型[6]。如式(1)所示:

作用于电动船上的力和力矩可表示为:

其中:带有下标H、P、R的项分别表示作用在船体、螺旋桨和舵上的水动力。
1)作用在船体上的力和力矩[7]

2)推进力及力矩建模
电动船航行时,螺旋桨的推力是主控力,用来克服水的阻力,维持电动船的操纵运动。螺旋桨产生的推进和转矩与桨的直径、转速、进速、水的密度、水的粘性系数和重力加速度等有关[6]。一般可表示为:

3)舵的控制力和力矩


上述所建立的模型涉及的水动力系数可通过计算流体力学(CFD)、船模试验或经验公式得到,关于水动力系数的估算方法参见文献[6],也可通神经网络等算法对模型中水动力参数进行辨识得到[7]。
2 影响电动船回转性能参数分析
电动船在水面上以一定的航速航行时,在接收到指令舵角后,舵机的转舵机构使舵以一定转速转至指令舵角,电动船开始在水面回转。表征一艘船回转性能的参数包括:进距、横距、战术直径和回转直径等。在高速航行时,大舵角回转要考虑电动船的横摇和横倾的影响,即要考虑电动船回转时的安全问题。电动传船的回转性能除了与其惯性、水动力导数有关外,还与控制翼面(螺旋桨、舵、减摇鳍等)的参数有关,本节分析影响电动船回转性能的主要参数[8]。
电动船相对船长的回转直径可由下式表述:
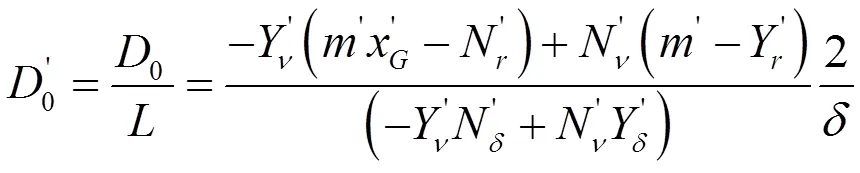
其中,0为电动船的回转直径,m;为电动船的船长,m;为舵角,deg;其它为无量纲的水动力导数。其中:

其中:为舵面积,m2;为舵展弦比,为舵处来流速度,m/s;C()为舵升力系数;为航速,m/s。
舵升力系数可由冈田经验公式得到:

其中:C为翼面的横流阻力系数。
由上可知,电动船回转性能与其船型参数和和舵型参数直接相关。对于一艘船型固定的电动船,如要改善其回转性能,通过合理设计舵角、舵面积、舵展弦比及转舵速度来实现。
4 仿真及结果分析
Williamson回转运动可用于电动船对落水求救人员的施救。具体操作方法为:向求救人员一侧最快速度转至满舵,待电动船航向偏转60 ~90 deg之间时,最快速度向转至另一侧的满舵,等到船的航向和初始航向相反时保持直航并适当减速停车[8]。
本文进行的研究是为了确定舵速对电动船Williamson回转性能的影响,搭建相应的仿真模型,其结构图如图1所示。针对本文搭建的仿真模型,假设如下:电动船向左打满舵,待航向偏转60 deg时方向时反向打满舵,在反向打舵后航向达到160 deg时舵打回零位。

图1 Williamson回转性能的仿真结构图
在给定初始电动船航速0=13 m/s,最大舵角左右=±35 deg。舵速分别为5 deg/s、7 deg/s、10 deg/s时在matlab下进行了仿真得到见图2。

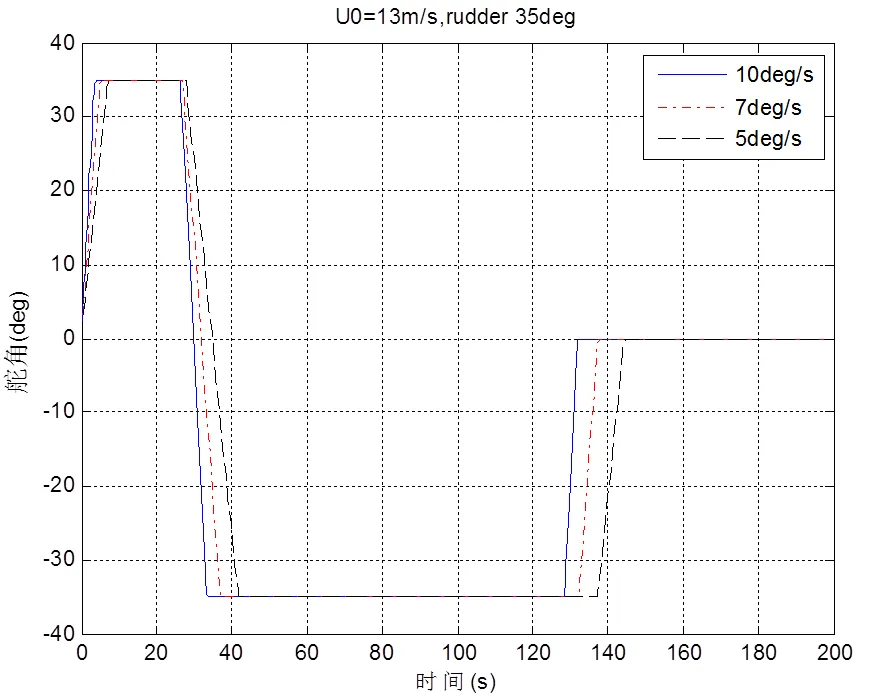
从上述仿真结果中可以看出,电动船在进行Williamson回转运动时,随着舵速越快,电动船回转性能越好,纵距和横距越小,回转所需的时间越小。
4 结论
本文主要分析舵速对电动船Williamson回转性能的影响,建立的电动船的非线性四自由度模型,然后从船型和舵型两个方面分析了影响电动船回转性能主要参数,在船型不变的情况下,通过合理设计舵角、舵面积、舵展弦比及转舵速度来实现改善电动船的回转性能。最后通过建立仿真模型,进行了舵速对Williamson回转运动的仿真。仿真结果表明:电动船在进行Williamson回转运动时,舵速越快,电动船回转性能越好,纵距和横距越小,回转所需的时间越小。仿真结果对电动船操纵性预报和总体性能设计可提供一定理论依据。
[1] 朱永怀, 俞万能, 孟飞. 纯电动游览船锂电池组的控制策略[J]. 船舶工程, 2019, 41 (4): 70-76.
[2] 刘艳妮, 王五桂. 变舵速对船舶Z型运动影响理论与试验分析[J]. 舰船科学技术, 2016, 38 (2): 18-21.
[3] 金鸿章, 王帆. 低舵速下具有能量优化的舵鳍联合减摇研究[J]. 兵工学报, 2009, 30 (7): 945-950.
[4] 王令蓉. 低舵速操舵控制技术研究[J]. 船电技术, 2011, 31 (6): 21-24.
[5] 王五桂. 不同舵速对船舶回转性能影响理论与试验分析[J]. 船电技术, 2016, 36 (7): 1-4.
[6] 贾欣乐,杨盐生. 船舶运动数学模型—机理建模与辨识建模版[M]. 大连: 大连海事大学出版社, 1999: 23~36.
[7] 陈重阳, 马曲立, 李海林,张天浩. 船舶横稳性高对操纵运动影响的四自由度仿真[J]. 海军工程大学学报, 2013, 25 (5): 101-112.
[8] 刘厚文. 船舶操纵性仿真与舵鳍联合控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2013, 50-57.
Simulation Analysis of Rudder Speed on Williamson Turning Performance of Electric Ship
Wang Sen, Wang Wugui, Chen Hanming, Zhang Xiang
(1. The First Naval Military Representative Office in Shanghai, Shanghai 201913, China; 2. China Ship Development and Design Center, Wuhan 430064, China )
U674 TP391.9
A
1003-4862(2021)06-0004-04
2021-05-13
王森(1988-),男,工程师。研究方向:电力集成技术。E-mail: woxinyouyou99@163.com