基于WSN节点能量补充的太阳能充电系统
2021-07-19曹佳棋李如鹏
曹佳棋 谷 爽 李如鹏
(山西师范大学物理与信息工程学院,山西 临汾 041004)
1 引言
无线传感器网络(WSN,Wireless Sensor Network)是由传感器节点构成的,能够实时感知外界环境并进行信息的采集和处理,进行信息的交互。而且由于其具有成本低、体积小等优点,被广泛应用于医疗、工业、环境等领域中。然而当传感器节点分布在广阔的丘陵地带、沙漠、建筑制造业地带时,其电池容量本身是有限的,也无法用物理连线为传感器节点提供能量[1],因此持续稳定可靠的电源来源是大范围分布无线传感器网络所面临的一大技术挑战[2]。基于自然环境中太阳能丰富充足的事实[2],本文提出基于WSN节点能量补给系统,将太阳能转化成电能储存至可充电锂电池中为WSN节点提供能量,延长无线传感器节点的寿命。
2 系统总体设计
系统总体框图如图1 所示。该系统由STM32F103C8T6最小系统所组成的控制电路、太阳能电池板、18650 锂电池,舵机和光照检测电路等部分组成。
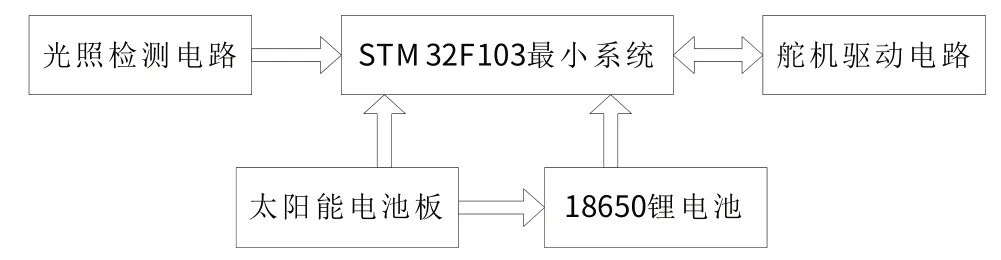
图1 系统的总体框图
2.1 太阳能能量收集模块
太阳能电池板吸收光能后,可通过光生伏特效应把太阳光能直接转化为电能。同时,考虑到单块太阳能电池板产生电流较小,所以本设计采用多片电池板并联的方式,以期达到较好的充电效果。
2.2 电池充电储能模块
电池充电储能模块一般选择锂电池,本设计选用常见的18650锂电池。考虑到太阳能电池板产生的电流和电压不稳定无法直接给电池充电,因此选用YXA 50V 470uf电容将太阳能电池板产生的直流电储存起来,再充入锂电池。当电容储存的电压大于锂电池电压时,电容给锂电池充电。
2.3 防反充模块
基于肖特基二极管具有高速低损耗、体积较小等特点,可在太阳能电池板和电容之间、锂电池和电容之间,分别串联一个肖特基二极管,防止相互之间的反充。
2.4 其他说明
本系统设计由硬件和软件部分组成。硬件电路部分的核心是STM32F103C8T6单片机,舵机以及光电传感器,软件部分是通过Keil MDK5平台设计并下载到STM32F103C8T6单片机进行控制。对于STM32F103C8T6的硬件部分则涉及单片机最小系统的制作。一个单片机最小系统通常包括供电电路、晶振电路、IO 输入输出电路、下载电路等组成部分[3]。
3 系统硬件设计
系统以STM32F103C8T6 最小系统为控制核心,主要模块是由单片机控制电路,光照检测电路,舵机驱动电路和电源模块电路构成。系统总体框图如图1所示。
3.1 单片机控制系统
系统以 STM32F103C8T6 作为主控制系统,STM32F103C8T6 是一款基于ARMCortex-M 内核STM32 系列的32位的微处理器,只需要3.3v的电压即可供电,工作温度为-40℃~85℃,最大能达到72MHZ的工作频率,拥有64kB的程序存储器,具有功耗低、控制方便、接口丰富、易于扩展、成本较低、体积较小、能够处理较为复杂的系统设计等突出特点[4]。
3.2 光照检测电路
3.2.1 光电传感器布局
为了能准确捕获太阳能光强的最大位置,本系统追踪模块采用4 光敏区传感器布局方式,如图2 所示。其中①、②、③、④位置处各放置一个forKY-018型光电传感器,整个电路板放置在一个十字交叉的隔板里,隔板高度和长度根据电路板尺寸和光电传感器的光敏面积计算确定,可以有效调整传感器接收光线的入射角度。4 个光敏电阻通过2个挡光板将受光区域分割成4个正方形部分,当太阳光移动时,4个光敏电阻的值就会发生变化。这种4光敏区布局充分考虑了太阳在东、西方向与南、北方向上的运动幅度差异,扩大了传感器模块的检测范围,提高系统环境适应性,电路设计也比较容易实现。

图2 四象限光敏电阻分布图
3.2.2 四象限光敏电阻探测器
光电检测部分采用四个forKY-018 型光敏电阻传感器,分布在与太阳能电池板平行平面的四个象限内。①、②、③、④光敏电阻传感器模块的AO 引脚分别与STM32F103C8T6的A1、A3、A0、A4 引脚相连,如图3 所示。每两个光敏电阻模块传感器一组。根据光敏电阻的光电效应,当太阳光斜射至太阳能电池板时,四个光敏电阻的值会发生变化。当光敏电阻传感器接收到太阳光时,光敏电阻传感器中的光信号接收器将光信号转化成模拟电信号,随后将模拟电信号传入STM32单片机,通过STM32单片机A/D转换模块的4个通道采集光敏电阻传感器的数值,然后对相邻的两个光敏电阻取平均值与另外两个光敏电阻的平均值进行比较(比如①②和③④比较,①③和②④比较),当数值不相等且平均值的差值超过了舵机灵敏度时,STM32 单片机分别控制两个舵机水平竖直转动。当舵机转动至与太阳光线垂直,四个光敏电阻接收到相同的光照强度,不产生电压差,舵机不转动。
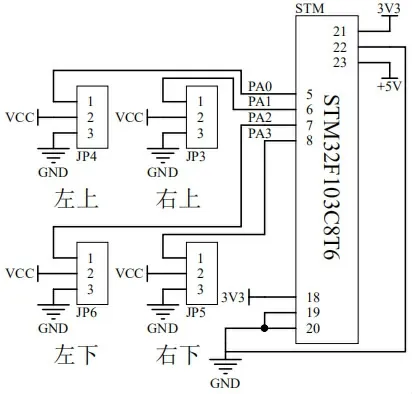
图3 光敏传感器电路图
3.3 舵机驱动电路
舵机是由电信号的脉冲持续时间决定旋转角度的一种伺服电机。本系统驱动舵机分为两部分,一部分为水平方向调整舵机,另一部分为竖直方向调整舵机。控制水平方向的舵机的PWM控制线与STM32CF103C8T6的B7引脚连接,控制垂直方向的舵机的PWM 控制线与STM32CF103C8T6 的B6引脚连接,如图4所示。当主控器感应到当前光照强度后,控制系统将提供PWM调速方式:控制信号由PWM控制线传输进入控制电路板,电机带动内部齿轮组,减速后传动至输出舵盘。舵盘转动带动位置反馈电位计,控制板电路将得到电位计输出的电压信号,进行反馈,产生一个特定的转动的方向和速度,驱动电路驱动舵机转动到灵敏度范围内停止。

图4 舵机驱动电路图
3.4 电源模块电路
考虑到舵机的承载能力、充电效率和实用性,我们采用两块太阳能板并联的方式(电压为6V左右),为18650电池供电。太阳能板产生的电先储存到YXA 50V 470uf 型电容c,然后电容放电给18650电池,为防止电流反充,在太阳能与电容、电容与18650电池之间分别加了二极管①和二极管②;太阳能板、二极管①和电容构成一个闭合回路;电容、二极管②和18650 电池构成一个回路。YXA 50V 470uf 型电容的电压、太阳能板电压与18650电池的电压均分别相差0.5V。如图5所示。
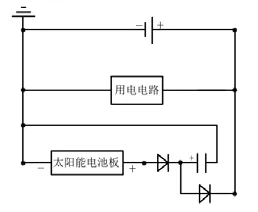
图5 电源模块电路
4 系统软件描述
本系统软件使用Keil MDK5 开发平台,采用C 语言设计。主程序流程图如图6所示。系统接通电源后,首先对各个模块进行初始化,当光敏电阻传感器接收到太阳光时,光敏电阻传感器中的光信号接收器将光信号转化成模拟电信号,然后将模拟电信号传入STM32单片机。AD接口采集数据得到四个光敏电阻传感器的电压值并计算水平、垂直方向两个光敏电阻的电压的平均值,判断水平方向两个光敏电阻平均值的电压差和竖直方向两个光敏电阻平均值的电压差是否在光电传感器的灵敏度范围内,若不在范围内,控制水平、竖直方向的舵机向电压较小的方向旋转,直至水平方向的电压差值调整到灵敏度范围内,使太阳能板始终与太阳光线垂直[5]。

图6 主程序算法流程图
5 实验结果及分析
在上述设计方案的基础上构建了一台太阳能自动追光模型,太阳能电池板对锂电池的充电功能在实验中得到了验证。实验结果如图7所示,18650锂电池的初始电压为3.8v,对锂电池进行放电处理,使其电压降至3.5v以下,放入电路中进行测试。2021 年4 月17 日,晴天,温度19℃,湿度38%,本实验测试了光照强度和电路中的四个节点(包括锂电池正极电压、太阳能电池板电压、电容正极电压、电池板供给锂电池的充电电流),数据采集周期为5分钟,得到7组数据,如图7。

图7 实测数据图
实验测得太阳能电池板在光照强度最大时获得最大电压,太阳能电池板电压、电容正极电压和锂电池正极电压均差0.5v 左右,满足肖特基二极管正向导通压降,且锂电池在35 分钟内,由原先的3.224v 提高到3.491v,在稳定的0.1A 左右的充电电流下电压上升了0.273v,电压增长了8.37%,为锂电池补充了能量。
6 结语
本文设计一个基于WSN节点能量补充的太阳能充电系统,太阳能追踪系统采用光电编码检测电路实现了舵机闭环检测机制,信号电压为0时无自转现象,转速随转矩的增加而匀速下降,减少了能量的消耗,同时实现了WSN节点能量的有效补给,延长了节点的寿命[6]。
