铁路复测中车载LiDAR数据精度控制分析
2021-07-19李丹
李 丹
(中铁第一勘察设计院集团有限公司,西安 710054)
1 概述
近年来,随着我国铁路运营里程的不断增加,列车运营的安全性显得愈发重要。阶段性地对轨道的几何状态及其平稳性进行复测具有重要意义[1-2]。随着铁路运营速度及频率提高,在传统 “天窗”时间采用单站式测量设备进行人工上线数据测量的方法难度越来越大,逐渐失去了可操作性[3-4]。因此,亟需一种安全、高效的新型测量手段[5]。
作为一种新兴测绘技术,车载三维激光扫描系统集POS定位定姿系统、激光扫描仪及数码影像传感器于一体,将其整体加装在交通运输平台上,通过非接触性主动式激光雷达扫描作业,可获取铁路沿线大范围地物的点云数据和影像信息[6-7]。该方法采用点云、影像数据一次采集,线下处理的方式,替代传统复测中的人工上线作业,提高了工作效率,增强了作业的安全性,降低了对列车运营的影响。另外,该系统能自动、快速地获取海量离散点云及影像数据,具有丰富的地理及属性信息[8]。解决了传统铁路复测技术手段落后、作业效率低与自动化程度低、对铁路运营干扰大及存在安全隐患等难题。
然而,车载LiDAR扫描系统是一个复杂的集成系统,受系统内各组成部分误差的共同影响,会导致原始点云精度不能满足铁路复测工作要求。已有许多学者进行相关研究,王丽英等通过建立系统误差模型对移动LiDAR的系统误差进行分析[9-10];张麟等通过沿线的平高点对点云进行精化的方法提高点云精度[11-12];冯嘉祥认为立体标识点可提高点云精度[13]。以下采用靶标控制网进行约束平差的方法,对三维激光数据进行质量控制,然后采用轨道几何状态测量仪获取的轨道成果及外业实测靶标数据对原始点云平面及高程误差进行分析,以研究靶标控制网对点云精度的影响。
2 车载LiDAR系统误差
将车载LiDAR技术运用于既有铁路复测中,为提高点云数据精度,首先需要考虑测量或处理过程中影响扫描点云精度的各类误差。根据误差来源,LiDAR测量误差可分为系统误差和偶然误差,系统误差会引起激光脚点坐标的系统偏差[14],系统误差主要包括以下几个方面。
2.1 系统集成误差
一般情况下,LiDAR测量系统中各个子系统在集成时需进行严格配准,坐标系之间的偏心量也需准确测量。但在实际作业中,这些要求往往得不到严格满足,从而产生系统误差。
安置角误差:一般指IMU系统与激光测距系统在安装至运输平台时,坐标轴不平行导致的角度安置误差[15]。
偏心量误差:指各集成传感器坐标系之间的平移误差,即激光束出射点到IMU系统中心之间的距离以及激光束出射点到GNSS接收机天线中心距离的测量误差[16]。
扭矩误差:扫描镜在转动和摆动时,由于惯性导致其转动角度与预置角度(记录数据)略有差异,该差值即为扭矩误差。
此外,系统集成误差还包括时间同步误差、内插误差及坐标系转换误差[17]。其中,坐标系转换误差包括:①瞬时激光束坐标系到激光扫描参考坐标系的转换;②惯性平台参考坐标系到激光扫描参考坐标系的转换;③激光扫描参考坐标系到工程坐标系的转换。其中,激光点云数据向工程坐标系的转换也是精度损失的重要部分。
2.2 差分GNSS误差
LiDAR测量系统采用动态差分GNSS进行定位,差分GNSS定位误差主要由地面基站的精度及布设位置、地面接收设备及其接收卫星的数量、卫星信号质量等引起。由于铁路线路长、环境复杂,在实际测量中,难以避免无GNSS信号或信号受多路径效应影响,故差分GNSS误差是目前影响LiDAR测量精度最主要的因素之一。
2.3 激光测距误差
激光测距误差由测距硬件和测距信号处理引起。测距误差主要包括激光测距仪器误差、大气折射率产生的误差(即激光传输过程中被大气吸收、散射、折射等引起的测距误差)和地面物体反射产生的误差(即地面目标的反射特性、坡度、起伏等引起的测距误差)。
2.4 测角误差
测角误差主要包括扫描角误差、姿态角误差及发散角误差等。
(1)扫描角误差:指当扫描反射镜的轴与马达的轴不在一条直线上,扫描电动机的非匀速转动及扫描镜的振动等产生的系统误差。
(2)姿态角误差:由惯性测量系统IMU获取的整个系统姿态参数误差,是影响定位精度的重要因素。测角的误差来源主要包括设备安置误差、加速度计的误差、各轴不相互垂直、扫描角误差、陀螺仪的漂移所产生的系统误差。
LiDAR系统误差较为复杂,部分硬件误差在出厂时已进行校正,然而,受铁路沿线复杂的地形条件的影响,在高路堑、隧道等区域,车载三维激光雷达测量系统易出现由于接收不到GNSS信号而导致产生定位误差的情况;此外,随着铁路上埋设的电子、电磁设备逐渐增多,均可能干扰惯性测量系统而导致其产生漂移误差、激光测距误差及测角误差等。
2.5 靶标约束
由于测量误差很大程度上影响了扫描数据的精度,导致原始点云精度降低。为获得满足铁路复测精度要求的点云数据,需通过布设靶标控制网计算原始点云与实际场景之间的坐标映射关系,然后通过该映射关系对原始扫描的POS轨迹线进行约束平差,将原始点云向点云实际位置上进行约束;最后,采用优化后的轨迹线重新进行点云融合解算,以获得优化后的高精度点云数据。点云精度约束的作业流程如图1所示。
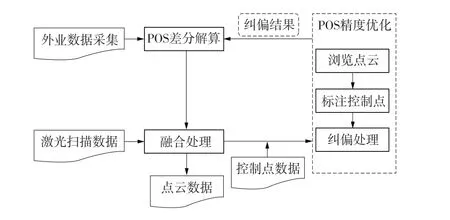
图1 点云精度约束作业流程
点云精度约束的映射关系通过计算原始点云P0和优化后融合的点云P1两套点云中多个特征点(靶标)坐标间的转换关系确定,即P0→P1,有

式(1)还可表示为
其中,R为两套点云间的旋转矩阵,由3个旋转参数(或称角度参数)θ、φ、σ确定[18],即

靶标精度约束的目的:确定从P0转换到P1间的3个平移参数ΔX、ΔY、ΔZ、3个旋转参数θ、φ、σ和1个尺度参数m。利用外业实测及原始解算点云中的两套靶标控制点作为公共特征点计算转换七参数,分段对POS轨迹线进行纠偏约束,使用优化后的轨迹线重新进行点云数据融合,然后采用检核点对点云精度进行分析,以验证点云精度是否满足铁路复测精度要求。
3 点云精度控制分析
3.1 线路概况
选择西安市阎良区某铁路专用线作为试验段,该地区位于中纬度内陆地带,属大陆性温带半干旱、半湿润气候,年平均气温13.6°,平均海拔370m。试验段全长4000m,为单线铁路,线路两端为直线段,中间为曲线,全线为西北-东南走向。线路曲线长254.8m,缓和曲线长30m,曲线半径930m。该铁路专用线采用工程独立坐标系,平面坐标系统采用WGS84基本椭球参数,中央子午线109°07′,投影面大地高350m。高程系统采用1985国家高程基准。试验采用如图2所示的作业流程。
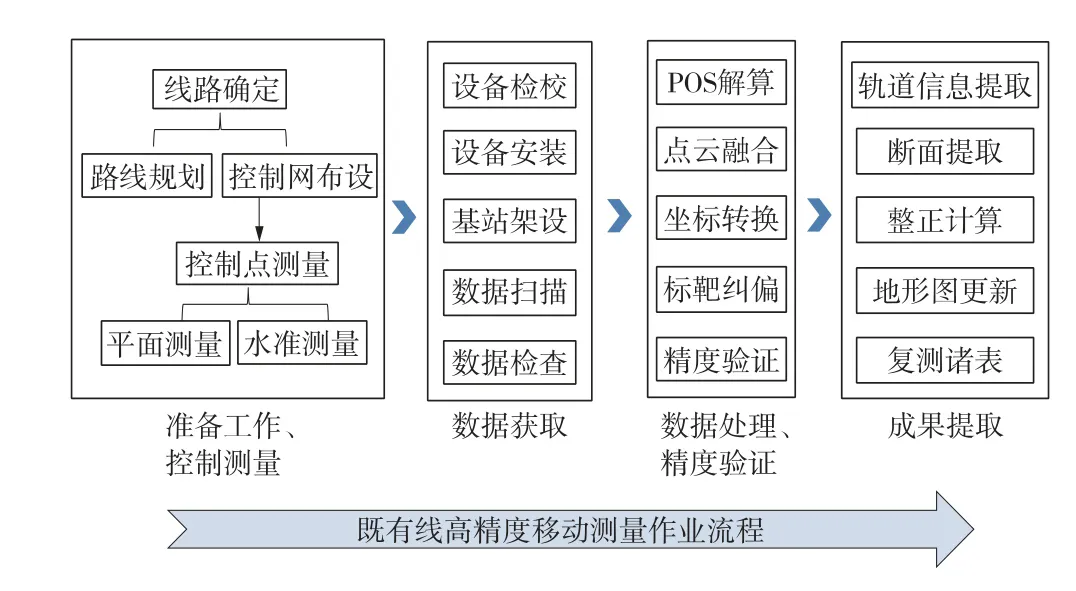
图2 基于车载LiDAR的既有铁路复测作业流程
线路扫描前,通过对沿线地形情况进行分析,在试验段范围内视场开阔、满足GNSS观测条件的位置布设C级地面基站GNSS控制点1个,并进行GNSS静态测量,以辅助车载LiDAR进行POS差分解算。为消除测量过程中产生的各种测量误差,沿线路建立靶标控制网,按450~550m间距沿线路两侧在百米标、公里标、桥涵牌、水泥台顶面等处交叉布设靶标控制点8个(见图3),靶标控制网有效控制线路长度为3.7km。

图3 靶标控制点(单位:mm)
扫描设备为Riegl VMX-450扫描仪,将扫描仪架设在轨检小车上,设定扫描参数对线路两侧进行全要素扫描,小车行驶速度为30km/h。扫描完成后进行POS差分解算并进行点云融合处理,采用两组检核数据对原始点云及靶标控制网约束后的点云数据进行精度检核分析。两组检核数据如下。
轨道成果数据:使用轨道几何状态测量仪进行轨道测量,分别采集铁路左右轨道轨枕上方钢轨面中心的三维坐标450个。
靶标定位点:外业实测的靶标定位点三维坐标数据。
检核数据的坐标系统有2套, A组:WGS84椭球,中央子午线108°,投影面大地高0m。B组(工程独立坐标系):WGS84椭球,中央子午线109°07′,投影面大地高350m。A组用于检核原始解算点云精度,B组用于检核采用靶标控制网约束平差后的点云数据精度。
3.2 原始点云精度
扫描前,通过外业控制测量及平差计算,获得试验段沿线路分级布设的地面基站和靶标控制点的GNSS数据。获得车载GNSS数据后,对组合导航数据及地面基站GNSS数据进行POS解算,获取WGS84坐标系下的原始扫描轨迹线数据。通过点云融合软件,将解算获得的POS轨迹线与原始扫描数据进行融合,得到WGS84椭球坐标系,中央子午线108°,投影面大地高为0m的原始激光点云数据,再分别采用两组检核数据的A组成果对原始点云数据精度进行分析。
(1)实测靶标数据检核
将获取的靶标外业测量成果作为检核数据,使用原始点云数据中提取的靶标定位点与该基准数据进行比较,输出原始点云的高程和平面精度报告。其中,高程和平面中误差分别为3.3cm、0.8cm,故该高程精度不能满足铁路复测的精度要求。
(2)轨道成果数据检核
以轨道测量小车外业实测的轨顶面中心点坐标作为检核数据,对输出的原始点云数据高程及平面方向进行精度分析,统计分析结果如图4所示。由图4可知,原始点云与实测数据的高程误差在-4.5~1.5cm之间,高程中误差为3.1cm;平面误差在-1.0~1.8cm之间,平面中误差为0.6cm。不难看出,原始点云数据存在高程漂移的现象,随着扫描时间延长,其高程误差逐渐累加,该原始点云高程精度不满足TB10105—2009《改建铁路工程测量规范》中既有钢轨面高程检测限差不应大于20mm的规定。
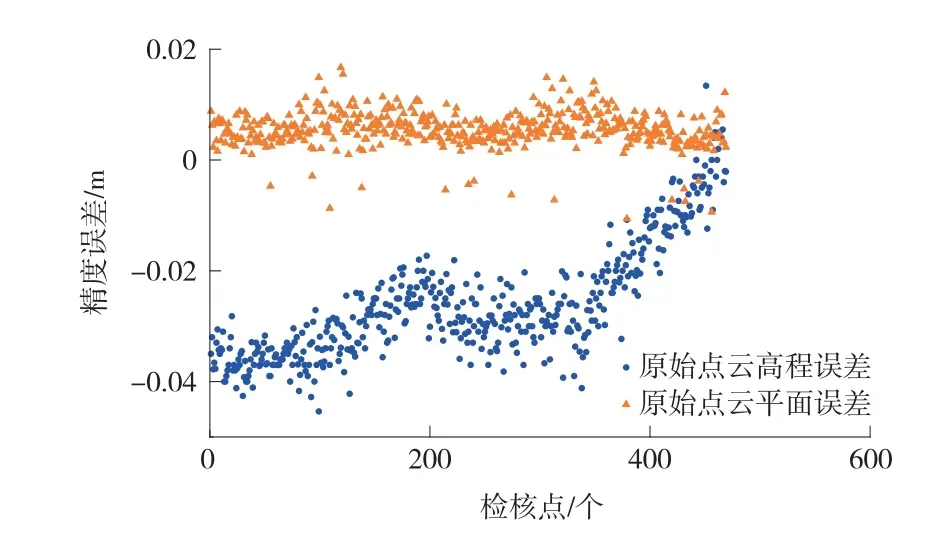
图4 基于轨道成果的原始点云精度误差
3.3 点云精度约束
在原始点云中,利用最小二乘法拟合立体靶标的3个立面,计算原网中靶标定位点的三维坐标。根据外业实测的工程独立坐标系下靶标点真实坐标计算转换七参数,采用该参数对原始解算POS轨迹线进行纠偏约束,采用优化后的POS轨迹线融合生成工程独立坐标系下的点云数据,再采用2组检核数据的B组成果对优化后的点云进行精度分析。
(1) 采用实测靶标数据检核
采用优化后点云中提取的靶标定位点坐标与外业实测靶标成果输出点云平面及高程精度控制报告。此时发现,靶标定位点的平面和高程中误差均为0.4 cm,能够满足铁路复测的要求。
(2) 采用轨道成果数据检核
使用靶标精度约束后的点云数据与轨道测量仪测得的轨道成果进行比较,如图5所示,经统计分析,发现高程误差在-1~0.4cm间浮动,高程中误差为0.5cm;平面误差在-0.8~0.4cm间浮动,平面中误差为0.4 cm,此时靶标纠正后的点云精度满足复测要求。
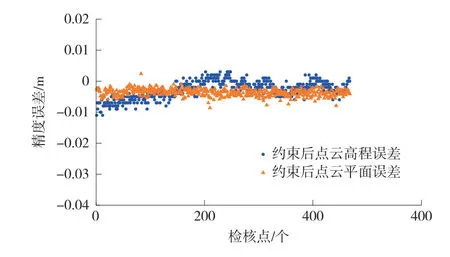
图5 基于轨道成果的靶标约束后点云精度误差
3.4 小结
采用外业实测数据分别对靶标约束前后的三维点云数据进行精度统计,如表1所示,发现使用靶标约束后的点云数据高程和平面精度均有提高,且满足铁路复测的精度要求,可用于后续的点云数据处理及平纵面参数解算。
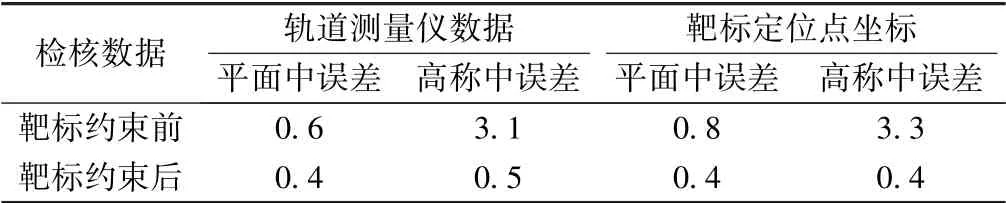
表1 靶标约束前后点云精度中误差比较 cm
4 复测要素提取
在获得满足复测要求精度的激光点云后,便可基于点云数据进行铁路复测要素提取(见图6)。通过自动或人工交互方式提取的左、右轨面中心点坐标计算轨道中线三维坐标,根据计算的轨道中线,结合激光点云数据可进行包括里程测量、断面提取、限界测量、曲线计算、设备调查及地形图更新等工作。
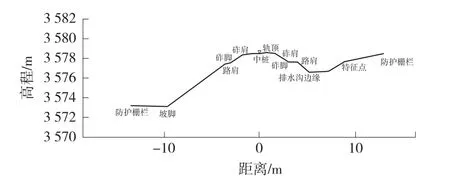
图6 断面提取
5 结论
采用高精度车载LiDAR技术可快速获取铁路沿线的全要素三维点云数据,解决了传统方法难以施测的难题,完善了铁路运行维护的测量体系。然而,受LiDAR系统硬件、测量及处理误差等影响,扫描获取的点云数据往往精度不高,不能满足铁路复测要求。通过比较靶标控制约束前后的三维点云数据的精度,经试验统计分析,约束后的点云精度较之前有较大提高,可满足相关规范的铁路复测精度要求。该方法解决了使用车载LiDAR技术进行既有铁路线路复测精度等关键问题。
