基于图像识别的轨道扣件定位系统研究
2021-07-16安小雪郑树彬柴晓冬
安小雪 郑树彬 柴晓冬 李 倩
1(上海工程技术大学工程实训中心 上海 201620) 2(上海工程技术大学城市轨道交通学院 上海 201620)
0 引 言
扣件沿钢轨两侧等距均匀分布,实现轨枕与钢轨的紧密连接。扣件一旦脱落或者缺损将导致列车经过时出现振动现象,严重影响列车安全运行[1]。目前国内在故障扣件定位方面仅有少部分路段采用自动化设备进行检测,绝大多数依靠人工肉眼识别进行维护。本文采用图像处理技术对辅助标识和扣件进行识别、计数,完成故障扣件精确定位。其中辅助标识制作简易、成本低,需要工程部门提前进行安装固定,后期可反复使用。该检测方法既能实现扣件粗定位,又能进一步精确定位,对于某一区间扣件严重污损或遮挡出现的精定位误差,可通过下一辅助标识识别纠正,故不会产生误差累积现象,具有一定的工程应用价值。
1 总体方案设计
轨道扣件定位系统主要包含图像采集单元、辅助标识识别单元、扣件识别单元及显示单元,定位流程如图1所示。其中图像采集单元由高速线阵摄像机、照明光源、光电编码器等部分组成,车辆运行中利用光电编码器触发线阵相机进行连续拍摄,获取完整扣件及辅助标识部位图像[2]。辅助标识识别单元首先计算图像是否包含辅助标识,相邻辅助标识之间存在多个轨枕,其次对含有标识图像进行预处理、旋转、分割、匹配等以实现扣件粗定位,扣件及辅助标识分布如图2所示。扣件识别单元计算图像中扣件相对位置[3]并进行计数,对未扣紧扣件进行精定位。

图1 扣件定位流程

图2 扣件及辅助标识分布
辅助标识由字母和数字组成,分别代表铺设位置线路、车站、数量等信息。该定位系统分别对左右钢轨及其内外两侧扣件进行检测,以单侧钢轨外侧扣件为例,当系统从A地运行到B地时,首先识别拍摄图像中辅助标识FB1,FB2,…,FBn,通过识别即可获取标识中具体信息实现扣件粗定位,当检测中出现漏识别或错识别情况时,可根据相邻标识信息进行纠错;其次识别两个标识之间扣件信息并对其进行计数KO1,KO2,…,KOm,假如判断某扣件为未扣紧状态,则结果显示为KIj(FBi),即可实现扣件精定位。根据扣件及辅助标识间距可计算得:
(1)
式中:LAB为A、B两地之间的距离;mFB为辅助标识FBn与FBn+1之间的扣件数;l为相邻两扣件之间距离。
2 辅助标识识别
相机拍摄图片中仅有少部分包含辅助标识,故对其识别前需预判是否含有辅助标识,其次进行图像裁剪以减少后期旋转、去噪、字符分割等处理的计算量[4]。
2.1 辅助标识预判
采用基于方向梯度直方图特征和SVM分类器方法对每幅图像是否含有辅助标识进行判断[5]。HOG特征提取中每个像素点的水平方向梯度和垂直方向梯度分别为Ix(x,y)和Iy(x,y),则该点对应的梯度幅值和方向分别为:
(2)
θ(x,y)=tan-1(Iy/Ix)
(3)
然后将图像分化为8×8个单元,计算每个单元的梯度方向直方图。把每相邻4个单元组成一个块,每个块中所有的特征向量串联起来即为该块的特征向量,最后归一化的向量就是HOG特征。
假设二分类的SVM训练样本为{(xi,yi)|i=1,2,…,k,xi∈Rn,yi∈[-1,1]},其中:n代表特征向量的维度;xi表示维度为n的特征向量;yi表示样本的标签,即1和-1分别代表正样本和负样本,正样本指的是包含地面辅助标识的样本图像,负样本指的是不包含地面辅助标识的样本图像。训练第一步将提取到的正负样本的特征向量分成训练集和测试集,这里的测试集和训练集各占正负样本特征集的一半;接着给正负样本的特征向量分别加上+1和-1的标签;最后开始训练支持向量机分类模型。根据结构风险最小准则确定最优超平面。分类结果存入对应位置的投票空间,检测到辅助标识记为1,不是辅助标识的记为0。
2.2 图像裁剪
对含有辅助标识的二值化图像进一步采用水平线搜索确定标识区域水平位置、垂直投影确定左右位置[6]。水平位置划分时首先确定行扫描像素变化率最高的行数Lm和变化次数m,然后以此为基础进行上下扫描,结合实际图片及像素变化率确定标识区域范围为[0.8m,1.2m],最后对整幅图像进行搜索即可确定辅助标识上下边界FBu和FBd。经过上下剪裁的图像其标识区域垂直投影会出现明显的像素变换,根据标识尺寸及像素变化率即可确定左边界FBl和右边界FBr。含有辅助标识图片及裁剪后图片如图3所示。

(a) 含有辅助标识图片

(b) 裁剪后图片图3 含有辅助标识图片及裁剪后图片
2.3 标识倾斜校正
辅助标识因安装、拍摄等因素会出现一定角度的倾斜。为提高标识识别准确率,采用Radon变换计算倾斜角度,采用双线性插值旋转进行校正[7]。Radon变换的原理为:设f(x,y)为二维函数,该函数在垂直和水平方向的线积分效果分别是将f(x,y)投影到x轴和y轴。由式(4)沿着任意角度θ来计算投影。

(4)


(a) 旋转前 (b) 旋转后图4 辅助标识旋转前后图片
2.4 字符分割
图片经过裁剪、旋转后得到相对独立完整的标识图像,对其进行二值化处理及垂直像素投影可发现字符之间存在明显的间隙,结合字符比例及模板进行精确划分以便后期识别。
(1) 近似分割。假设标识中共包含M个字符且每个字符在相机拍摄图像中所占像素数固定为(XN,YN),则理想标识尺寸为(MXN,YN)。实际图像分割后各字符像素数为X1,X2,…,Xn,当Xn∈[0.9XN,1.1XN]且n=M时,表示字符分割正常。异常字符分割主要分为以下三种情况:当Xn>1.1XN且n

图5 标识及字符像素数
(2)
图像模板化。首先设计字符模板图像为(W,H),其与标识模板化后尺寸(W′,H′)非常接近。假设模板图像中左上角和右下角像素坐标分别为(x1,y1)、(x2,y2),则模板图像中某点(x,y)与模板化后对应点(x′,y′)之间的关系为:
(5)

(6)
匹配时,标识图像和模板图像在垂直位置保持一致,将模板在标识上从左向右移动,每移动一个像素,记录一个中点平均距离差Ej,当移动总步长为一个字符的像素数XN时,得到的距离差和水平移动像素数{(Ej,j)},j=1,2,…,N。其中min(Ej)对应的水平位置即为实际标识图像中字符的精确分割点。具体匹配过程如图6所示。

图6 模板匹配精分示意图
图7为污染后标识字符分割图,其中粘连字符像素宽度不标准时,后期将无法识别,字符经过模板化、模板匹配后可实现精确分割。

(a) 近似分割 (b) 精确分割图7 字符近似分割和精确分割
2.5 字符识别
采用卷积神经网络法对输入字符进行识别[8]。假设辅助标识由0-9的10个字符构成,输出层共有10类,设计7层的网络构架,输入图像的尺寸统一为12像素×16像素。
卷积层C1、C2的卷积核大小同为3×3,滑动补偿均为1,卷积层C1、C2的特征图数量分别为10和30,特征图大小分别为10×14、3×5;池化层S1的池化窗口大小为2×2,滑动步长为2,特征图数量为10,特征图大小为5×7;全连接层的输出分别为30和10。激活函数的函数表达式为:
f(x)=max(0,x)
(7)
卷积神经网络训练[9]中学习率、批次样本量、迭代次数是三个非常重要的参数。梯度下降法中的参数α表示学习率,梯度下降法表示为:
(8)
式中:W为每层的权重矩阵;b为偏置向量;f(x)为误差函数。α设置太小则网络长时间无法收敛,α设置太大则收敛过快。批次样本量过小,网络的稳定性变差,可能最终无法收敛;批次样本量过大,则带来训练时间增长、困于局部最优解等问题。迭代次数参照目标函数的收敛和趋于稳定的结果来设置。识别结果如图8所示。

图8 识别结果
3 扣件识别
基于梯度方向场原理对采集图像进行处理确定钢轨区域,结合钢轨与扣件的位置关系、图像比例等将目标搜索锁定在一定范围进行裁剪以减少匹配计算量,利用扣件方向场模板与实际扣件方向场匹配识别扣件精确位置并进行计数[10],具体实施步骤如下:
(1) 对图像进行中值滤波减少噪声影响,采用线性滤波方法计算图像中每个像素点的梯度向量T=[gx(x,y),gy(x,y)]T,其中gx(x,y)和gy(x,y)分别表示任一像素在x方向和y方向的偏导;
(2) 将扣件区域图像划分为一系列由多像素组成不重叠的块,计作W×W,则块方向场的梯度平方向量为:
(9)
块方向角为:
(10)
(3) 由式(11)计算块方向场的各向一致性,根据各向一致性的特点可知,钢轨区域的C值趋近于1。
(11)

是块内像素的平方梯度向量。
(4) 结合钢轨与扣件的位置关系、图像比例等计算出扣件区域并进行裁剪。
(5) 选取标准扣件图像进行模板采样,将采样间隔设置为5像素×5像素,块尺寸大小为10像素×10像素,模板采样图像如图9所示。

(a) 模板图像 (b) 模板方向场图9 扣件模板原图和采样后的模板方向场图
(6) 将扣件方向场模板与每次裁剪的扣件图像方向场进行匹配以确定扣件精确位置。假设方向场模板大小为m×n,表示为θM(x,y),实际图像方向场为θ(x,y),则对应块之间的距离差为:
(12)
当方向场模板与实际图像方向场越接近,它们之间的距离差越小,即D(x,y)越小,搜索过程中minD(x,y)对应位置即为扣件精确位置[11-13]。图10为无砟轨道扣件图像匹配结果。

图10 待搜索图像匹配结果
4 实验结果分析
实验选择石家庄井陉区隧道现场进行图像采集,使用DALAS公司线阵工业相机进行拍摄,两辅助标识之间间隔100个扣件,距离60 m。选取其中单侧500幅连续图片进行处理,人工统计结果:5幅含有辅助标识,487幅扣件完整且无污损,12幅扣件存在缺陷,1幅存在干扰。辅助标识及扣件识别结果如表1所示。从结果来看,辅助标识在现场由工作人员临时放置,基本不存在污损遮挡,故识别率较高。扣件长期处于隧道环境中,部分甚至出现缺损及外物干扰,故一定程度降低识别率,影响扣件位置精定位。两个扣件成对布置在钢轨两侧,同时进行识别,若内侧或外侧扣件出现未识别情况,可由另一侧识别结果进行计数。
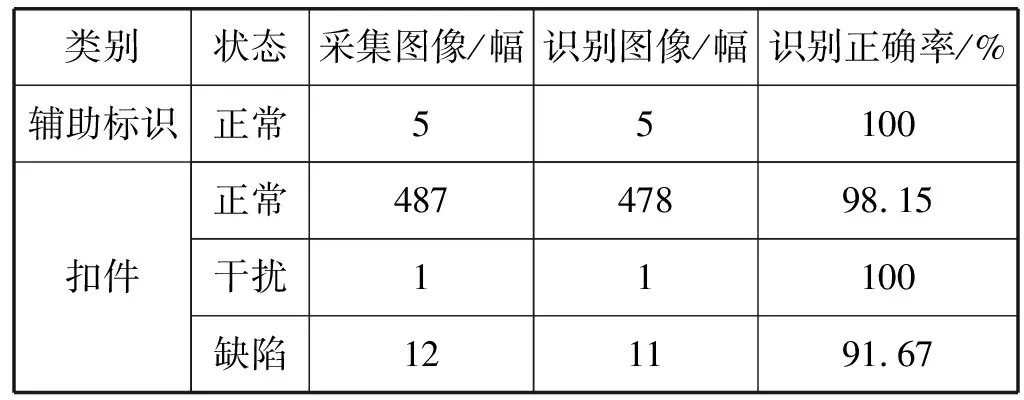
表1 单侧图像识别结果数据表
为了验证扣件定位的精确性,实验从存在缺陷的扣件中选择6个进行标记,其位置分别为0.252 6 km、0.706 8 km、1.409 4 km、1.684 2 km、2.781 6 km,然后使用文中所述方法进行定位,定位结果如表2所示。实验数据表明,扣件缺陷所带来的识别误差会影响定位误差,但每识别一个辅助标识,前一区间的扣件误差将被清零,故不会产生误差累积现象,该轨道扣件定位方法具有一定的工程应用价值。

表2 两种轨道定位方法对比
5 结 语
故障扣件精确定位能为后期维护保养提供重要支持。本文通过辅助标识识别、扣件识别及计数可实现扣件精确定位。对于辅助标识,需要工程部门提前在铁路沿线轨枕一侧每间隔一定距离进行铺设,使相机在拍摄中能同时获取完整辅助标识和扣件图像。辅助标识识别采用图像裁剪、倾斜矫正、字符分割、识别等方法进行处理初步实现故障粗定位。扣件识别时采用梯度方向场原理裁剪、利用方向场匹配及计数实现扣件精定位。现场实验数据表明:绝大多数扣件能被精确定位,但缺损及干扰扣件检出率低,影响定位;新的辅助标识被识别后能有效纠正前一区间产生的误差,不会产生长距离误差累积现象,因此具有一定的工程价值。
