Sentinel-2A影像珠海市污染水体识别
2021-07-15谢勇李凯云李家国鲍云飞朱利
谢勇,李凯云,,李家国,鲍云飞,朱利
(1.南京信息工程大学 地理科学学院,南京 210044;2.中国科学院空天信息创新研究院,北京 100101;3.北京空间机电研究所,北京 100094;4.生态环境部卫星环境应用中心,北京 100094)
0 引言
河流与水库是最重要的淡水资源之一,在调整支流、农业灌溉、防洪排水以及调节全球生态平衡中起着重要作用,是全球经济可持续发展与人类生存和发展的重要保证。未经处理而直接排放的工业废水和生活污水,会导致水生态系统被破坏、河流湖泊污染加剧、部分水域富营养化,给国家带来了严重的经济损失[1]。因此,污染水体的监测在陆地水资源保护与污染治理中十分重要。
传统的污染水体监测主要采用定点定剖面采样进行水质的化学因子分析,面对大尺度的水域时,传统的监测方法则表现出工作量大、投入大、周期长的缺点。而遥感影像具有时效性与宏观性强的特点,能清楚地反映出区域甚至整个流域污染现状和空间分布特征[2]。目前,污染水体的遥感识别算法常采用经验/半经验模型。其中,经验模型的建立是将实测数据和遥感数据进行统计相关分析,得出二者之间的定量关系。例如文献[3-6]通过波段比值、波段差值等波段组合方式分别对悬浮物浓度、透明度、叶绿素浓度、浊度等水质参数进行反演和预测,结果表明实测数据和估算的水质参数值具有良好的一致性,可有效监测水质参数的变化,为水质快速监测提供了有效的技术支持。半经验方法则是以辐射传输模型为基础,通过离水辐射率的定量关系反推水体各个成分的吸收系数和散射系数,同时依靠实测数据和水体固有光学参数的转换关系,定量计算水质参数,如顺日布等[7]检验了Nechad算法[8]、多波段准分析算法(quasi-analytical algorithm,QAA)[9]、最优化模型[10]等在黄河口水域悬浮物反演的适用性,结果表明,Nechad算法、QAA算法反演效果稳定可靠,且具有相似的空间分布特征。除常用的经验/半经验算法模型外,深度学习方法也逐渐成为水质监测的技术手段,如Kupssinskü等[11]使用线性回归模型、支持向量机模型、随机森林模型、人工神经网络模型等方法对叶绿素和悬浮物浓度进行反演,结果表明,随机森林模型适用于叶绿素a和悬浮物的估算。根据以上研究现状可知:以往多数学者研究地区为河口、湖泊等限定地区(如黄河口、珠江口等),针对内陆河流的污染水体反演研究鲜有报道;相对于以往所涉及的中低分辨率遥感数据,如MODIS、MERIS、Landsat等,Sentinel-2A具有独特优势。Sentinel-2A的优势具体表现在:空间分辨率方面,Sentinel-2A数据优于MODIS、MERIS数据;时间分辨率方面,Sentinel-2A数据优于Landsat数据。另外,MODIS和MERIS传感器已接近和超过卫星设计寿命。
基于此,本研究利用具有较高时间和空间分辨率的Sentinel-2A影像,通过分析污染水体和一般水体在遥感影像上光谱特征差异,构建污染水体识别算法,评价水体污染监测成效,进一步根据水体污染空间分布监测结果探索珠海市内陆河流污染来源,以期为珠海市及周边地区水环境质量安全控制提供依据。
1 研究区与数据
1.1 研究区概况
珠海市位于广东省中南部,珠江出海口西岸,是珠江三角洲中心城市之一,地处21°48′N~22°27′N,113°03′E~114°19′E之间。珠海市河流主要为西江的出海水道,有磨刀门水道、鸡啼门水道、虎跳门水道和前山水道。珠海市属典型的南亚热带季风海洋性气候,终年气温较高,气候湿润,雨量充沛。近年来,随着珠海市工业化、城市化进程的加快,来自工业发展超标排放的工业废水和大量未经处理的生活污水汇入河流,导致河流、湖泊等水污染现状进一步加重。水资源质量不断下降,水环境持续恶化,由水污染引起的缺水问题和相关事故不断出现,造成不良的社会影响和较大的经济损失,严重威胁着居民的生存和社会的可持续发展。
1.2 数据获取
1)卫星影像。Sentinel-2A多光谱成像卫星于2015年6月23日发射,携带一枚多光谱成像仪MSI(谱段参数见表1),可用于陆地监测,提供植被、土壤和水覆盖、海岸区域等图像[12],还可用于紧急救援服务。由于Sentinel-2A影像易获取,且影像宽幅较大、覆盖面积广、重访周期短(10 d)、在可见光波段及近红外波段空间分辨率较高,因此适用于城市大、中型河流和湖泊污染水体监测。
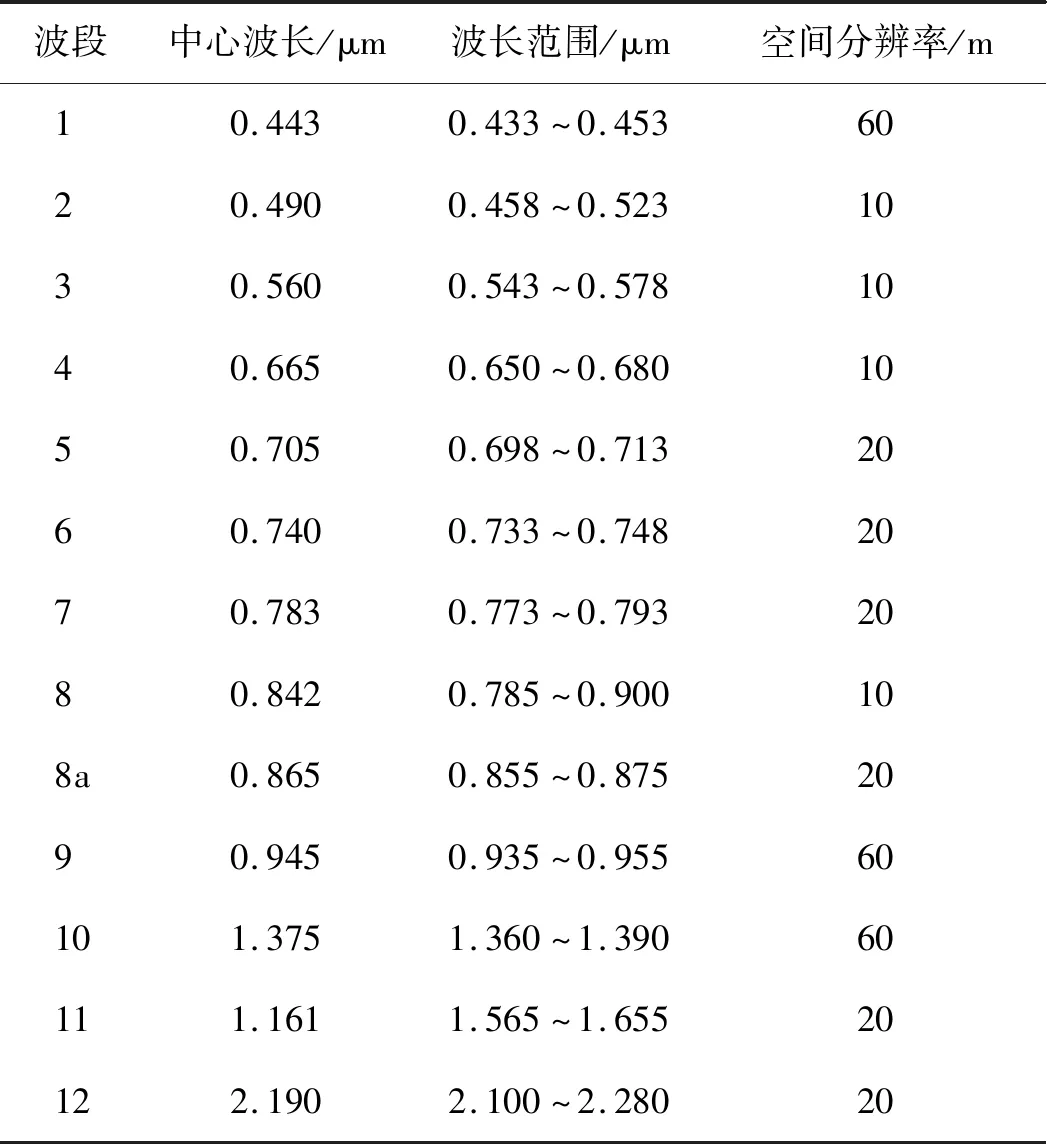
表1 Sentinel-2A波段信息
由于Sentnel-2A Level-1C级影像数据为经正射校正和亚像元级几何精校正后的大气表观反射率产品[13],因此本文对Sentnel-2A数据进行了大气校正、重采样和裁剪等预处理操作。大气校正的目的是为了消除大气和光照等因素对地物反射的影响,获取地物真实反射率数据。同时,为了保持所有通道空间分辨率大小一致,对影像进行了10 m重采样操作。本文对Sentinel-2A影像的大气校正和重采样操作均借助于欧空局发布的Sen2cor工具集和SNAP软件完成。
经图像清晰度目视判别,并结合获取时间、太阳光照条件、地表云量占比、影像区域覆盖范围等因素,最终筛选出覆盖珠海市全区的2019年1月25日、2019年9月22日和2020年1月30日三期影像,进行污染水体遥感识别算法构建与评估以及污染水体空间分布识别和特征分析。
2)河流断面类型。通过珠海政府网站(http://www.zhuhai.gov.cn/)发布的2018年、2019年和2020年主要江河水质月报确定污染水体断面。监测断面共七个,即前山码头、石角咀水闸、尖峰大桥、鸡啼门大桥、布洲、珠海大桥、虎跳门水道河口。判断污染水体断面的依据为《地表水环境质量标准》(GB 3838—2002)中Ⅳ类及以下,一般水体断面为Ⅲ类及以上[14]。由于珠海政府网站发布的月报为月统计结果,为了更加准确判别污染水体和一般水体断面类别,利用影像获取前后各一个月的月报指标对水体断面进行判别,结果如表2所示,其中污染水体断面4个,一般水体断面15个。
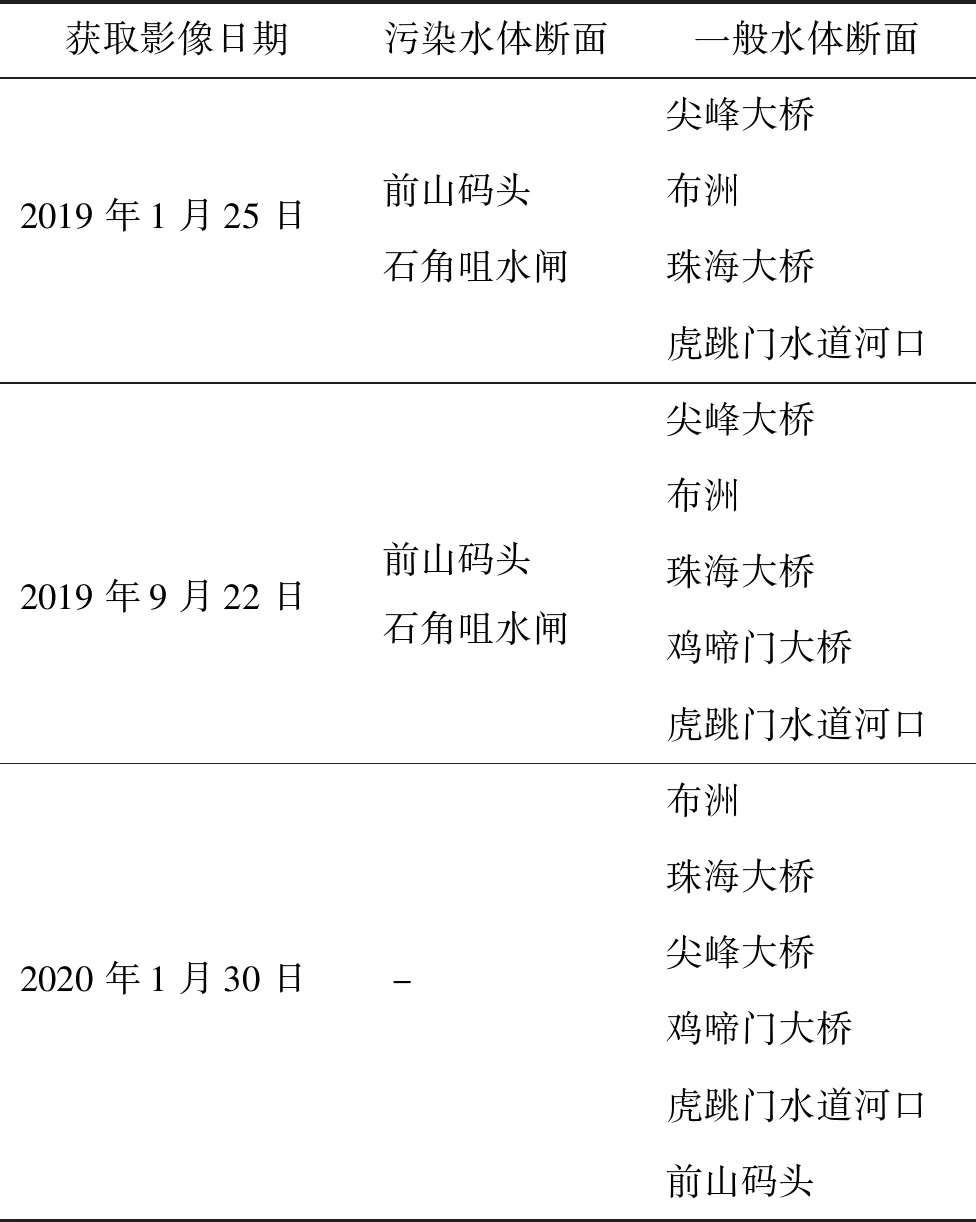
表2 珠海市河流断面水体判别结果
2 水污染遥感识别方法
2.1 水域提取
王大钊等[15]使用Sentinel-2A影像对比分析了四种水体提取方法。结果表明,改正后的归一化差分水体指数(modify normalized difference water index,MNDWI)[16]提取精度为96.74%,效果较好。因此,本文使用MNDWI提取珠海市水域信息,如式(1)所示。
(1)
式中:ρgreen为Sentinel-2A影像的第3波段反射率;ρSWIR为Sentinel-2A影像的第11波段反射率。
2.2 水体样本提取
基于表2,本文在监测断面1 km缓冲区(图1中红色部分)内使用ArcMap软件生成100 m×100 m的均匀样本点。由于1 km缓冲区范围内含有非水域部分,因此去除非水域样本点后,最终获取位于水域的样本点数量942个,包含一般水体断面样本点731个、污染断面的样本点211个。其中,样本点的3/4用于构建污染水体遥感识别算法,1/4样本点用于算法精度验证。一般水体和污染水体断面平均反射率光谱曲线和其标准差分布如图2、图3所示。

图1 监测断面分布(图中①~⑦依次为:布洲、虎跳门水道河口、前山水道、石角咀水闸、珠海大桥、尖峰大桥和鸡啼门大桥监测断面缓冲区)

图2 一般水体和污染水体断面平均光谱曲线
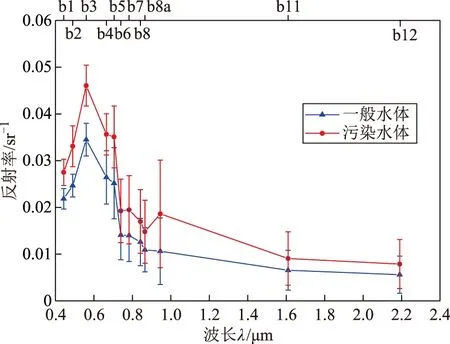
图3 一般水体(总)和污染水体(总)断面平均光谱反射率标准差
2.3 水污染遥感识别算法
通过卫星手段监测污染水体,主要是利用水体自身的遥感光谱信息建立其与水质参数的关联模型[17]。污染水体遥感识别算法的构建原则是通过污染水体和一般水体之间的光谱差异特征,进行波段组合运算来增大不同水体之间的差异。基于此,参考当前其他水体异常提取方法,构建水体识别算法对珠海市全行政区进行污染水体识别提取。
目前,国内外学者提出了多种波段组合算法对湖泊、河流水质进行遥感识别,如使用单波段阈值法(RNIR、R705 nm、Rred)对矿区水体、湖泊水体进行遥感识别[18-20],使用波段比值法(Rred/RNIR、R0.665 μm/R0.705 μm、R0.663 μm/R0.490 μm)对一些水质参数(叶绿素a,悬浮物等)进行污染水体监测[21-23],使用波段差值法(Rgreen-Rblue、R0.705 μm-R0.754 μm)[24-25]、比值植被指数(ratio vegetation index,RVI)[26]、归一化差分叶绿素指数(normalized difference chlorophyll index,NDCI)[27]、清洁水体指数(water cleanliness index,WCI)[28]等识别算法对污染水体进行识别。本文结合污染水体和一般水体的光谱特征差异(图2和图3),分别使用单波段阈值法ρgreen、波段比值法ρred/ρre1、波段差值法ρgreen-ρblue,对珠海市污染水体进行识别,并参考光谱反射率均值和标准差确定污染水体分布阈值。识别公式如表3所示。
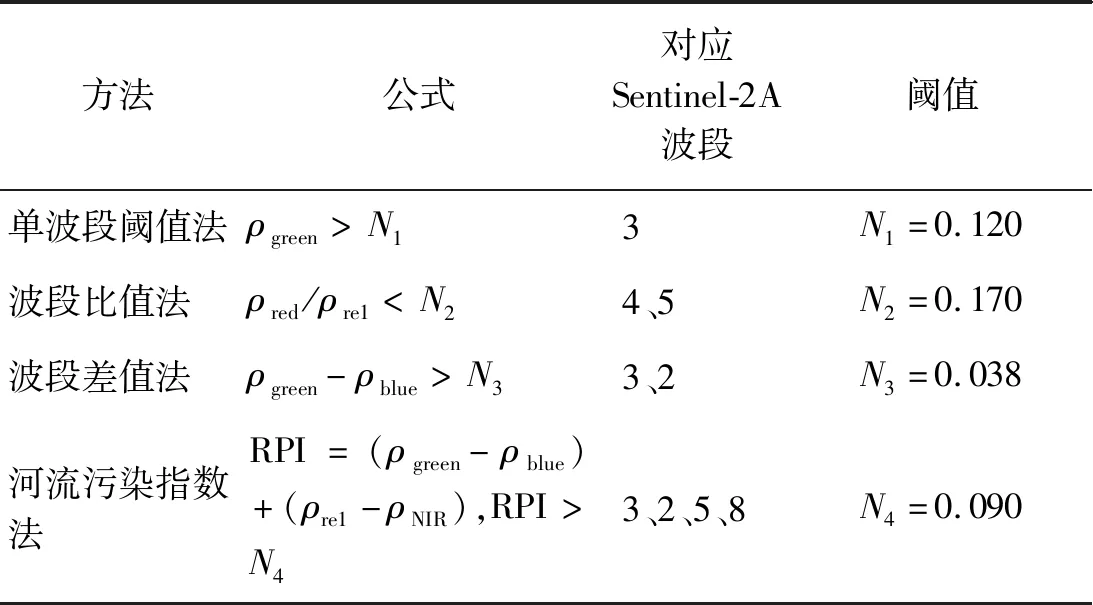
表3 四种遥感识别算法公式
由图2和图3污染水体和一般水体的平均光谱曲线可以得出,污染水体水表反射率在波长0.490~0.560 μm之间的差值比一般水体在此波长范围内明显偏高,且在0.490 μm和0.560 μm处标准差较小,分别为0.014和0.119,同时污染水体水表反射率在0.705 μm与0.842 μm处的差值比一般水体要高。由此可知,Sentinel-2A对应此光谱范围内的四个波段能够很好地体现污染水体的光谱特征。为了进一步增加污染水体与一般水体的光谱特征差异,使用这两组差值的和来增大两种不同水体类型的差异。因此,选择绿光波段、蓝光波段、红边1波段和近红外波段四个波段,构建河流污染指数法(river pollution index,RPI)来识别珠海市污染水体,如式(2)所示。
(2)
式中:ρgreen、ρblue、ρre1、ρNIR分别对应Sentinel-2A影像的第3波段、第2波段、第5波段、第8波段反射率。
3 结果与讨论
3.1 污染水体空间分布
根据构建的四种遥感识别算法分别对2019年1月25日、2019年9月22日和2020年1月30日三期影像进行污染水体识别,结果如图4至图6所示。从识别结果可以看出,珠海市主要污染水体分布在香洲区南部和金湾区东部,而位于西北部斗门区污染水体面积分布则较少。其中,波段比值法对于污染水体的识别面积明显比单波段阈值法、波段差值法和河流污染指数法偏大,主要体现在将部分河流和湖泊等一般水体识别为污染水体。
图4 2019年1月25日水污染遥感识别结果
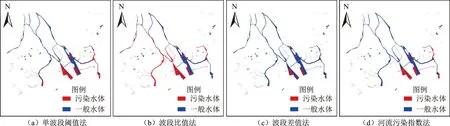
图5 2019年9月22日水污染遥感识别结果
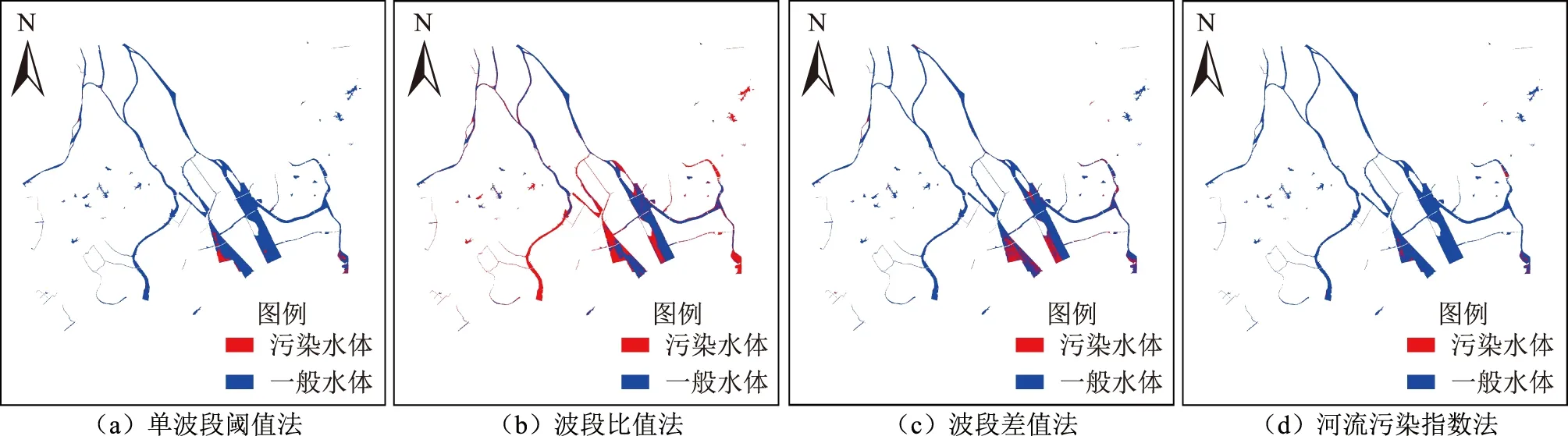
图6 2020年1月30日水污染遥感识别结果
3.2 遥感识别精度验证及误差分析
为了验证单波段阈值法、波段比值法、波段差值法、河流污染指数法四种遥感识别算法对珠海市污染水体的识别效果,选用精度验证公式(式(3)))进行验证,验证结果如图7所示。
(3)
式中:η为验证水体类型的正确率;n为验证水体类型正确样本数;N5为验证水体类型的总样本数。
根据四种污染水体遥感识别精度验证结果(图7),构建的河流污染指数的识别准确率最高,其中污染水体的识别准确率高达92.59%,单波段阈值识别准确率次之,为86.79%,波段比值法对污染水体识别效果较差,识别准确率仅为64.81%。从整体上来看,河流污染指数法对污染水体和一般水体的识别准确率较高,适用于珠海市河流污染水体的遥感识别和提取。
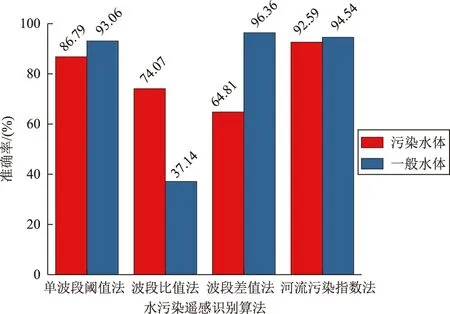
图7 四种水污染遥感识别算法精度验证结果
3.3 提取结果空间精细分析
本文选取杨寮水库和前山水道部分水域遥感识别结果(图8至图13)进行误差精细分析。其中,杨寮水库为集中式生活饮用水水源,长期处于达标状态,判定为一般水体;前山水道水质情况根据影像月报统计结果,判定2019年1月25日和2019年9月22日处于污染状态,2020年1月30日部分水体为污染状态。
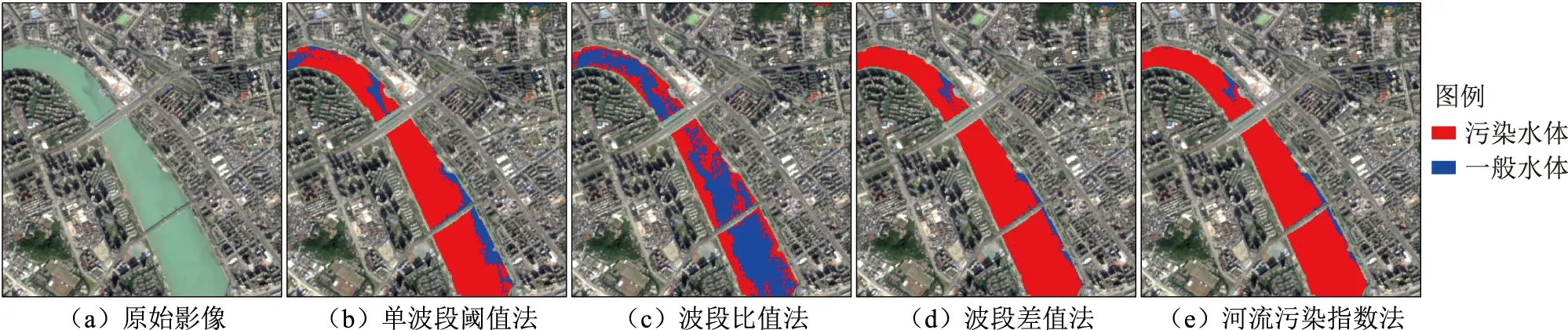
图9 2019年1月25日前山水道水污染识别结果
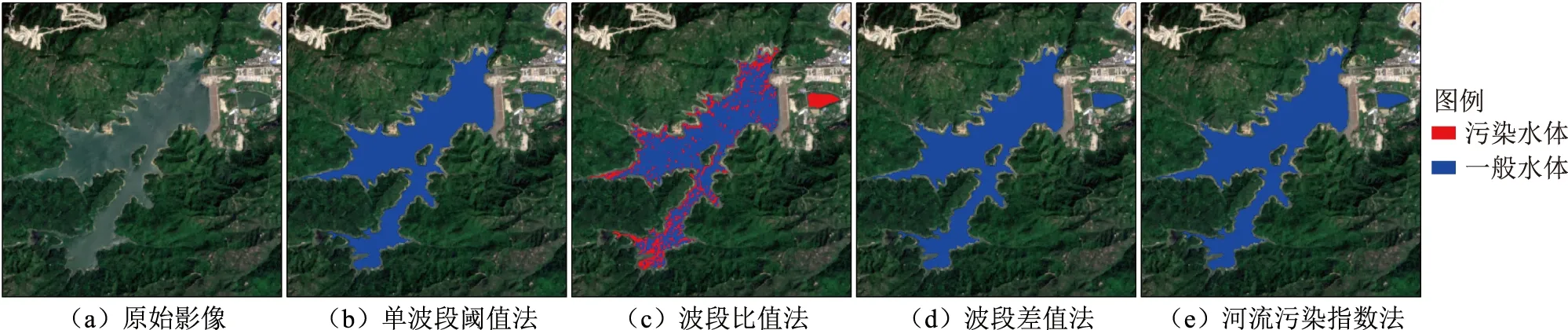
图10 2019年9月22日杨寮水库水污染识别结果

图11 2019年9月22日前山水道水污染识别结果
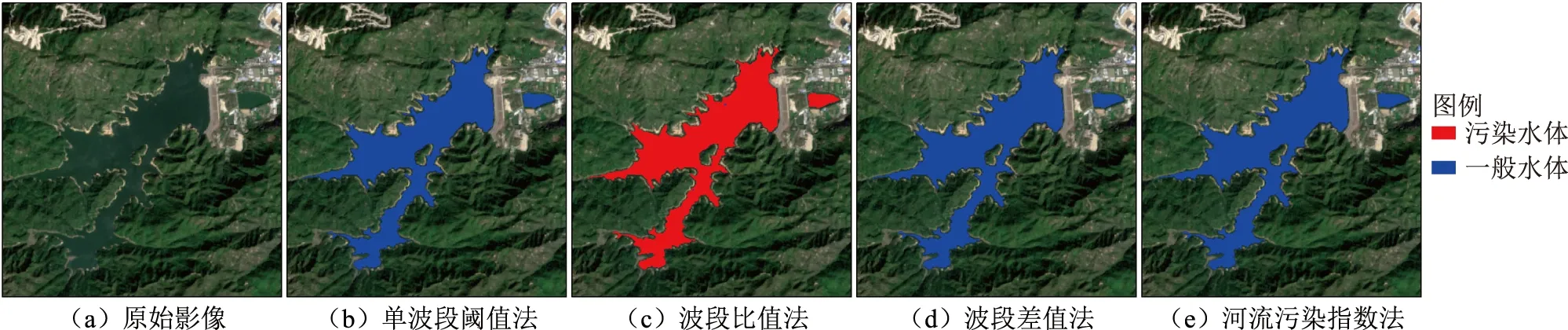
图12 2020年1月30日杨寮水库水污染识别结果
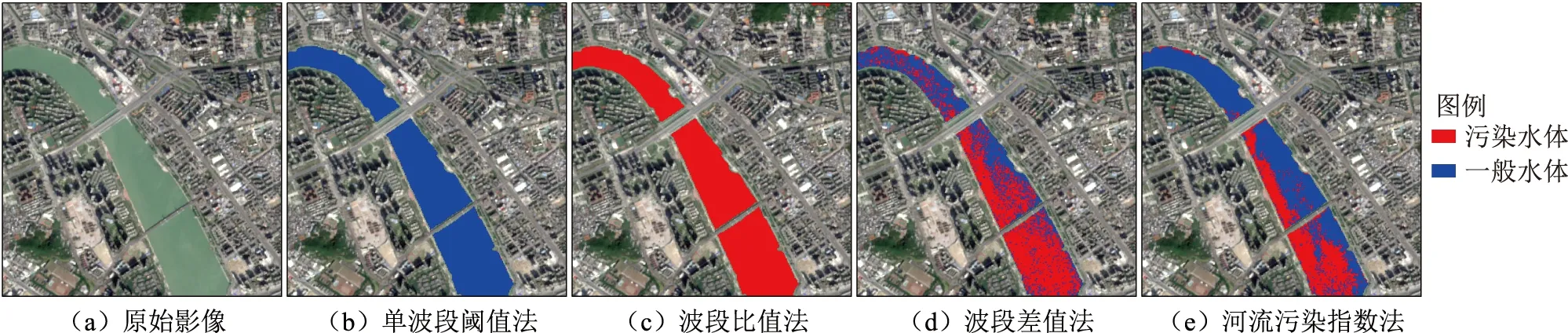
图13 2020年1月30日前山水道水污染识别结果
1)单波段阈值法。从遥感识别结果可以看出,单波段阈值法对于污染水体和一般水体的区分较为明显,由图8(b)和图11(b)识别结果可知,该识别算法将前山水道部分污染区域误判为一般水体,造成污染水体识别面积偏低。
2)波段比值法。从图8(c)和图12(c)杨寮水库识别结果可以看出,波段比值法将水库、湖泊等一般水体误判为污染水体,将图9(c)前山水道部分污染水体误判为一般水体。结合图4至图6波段比值法对三期影像的识别结果,该方法对于污染水体的识别面积偏高,造成了识别准确率下降。
3)波段差值法。由波段差值法对于杨寮水库的识别结果可以看出,该方法对于一般水体的识别效果较好;而从前山水道图11(d)的识别结果可知,该污染区域被误判为一般水体,造成了污染水体识别面积偏小,识别准确偏低。
4)河流污染指数法。相波段比值法对于湖泊、水库等一般水体的误判,单波段阈值法和波段差值法对于污染水体的识别不稳定。河流污染指数法对于一般水体识别效果较好,对前山水道长期为污染水体的识别符合实际情况。总体而言,河流污染指数法对于两种水体类型的识别精度较高,适合珠海市大、中型河流和水库污染水体的识别。
3.4 断面识别结果分析
根据精度验证和分析的结果,使用河流污染指数识别算法对监测断面进行识别结果统计(图14)。从图14可以得出,2019年1月至2020年1月期间,前山码头、石角咀水闸和虎跳门水道河口污染程度均呈下降趋势。布洲、鸡啼门大桥、尖峰大桥和珠海大桥四个断面河流污染指数虽在2019年9月份呈现上升趋势,但仍均处于一般水体状态。
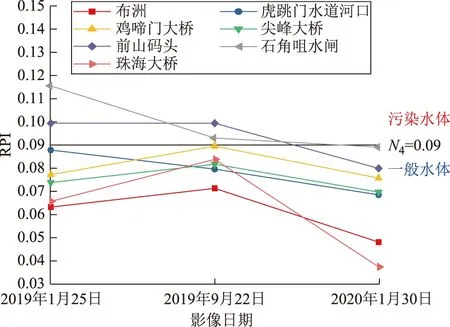
图14 监测断面识别结果统计
3.5 污染水体时空分布及成因分析
使用河流污染指数识别算法对2019年1月25日、2019年9月22日和2020年1月30日影像的污染水体和一般水体进行面积统计(图15)。从污染水体的空间分布上来看,主要分布在香洲区和金湾区,而斗门区污染水体面积相对于香洲区和金湾区较小。其中,香洲区污染区域主要分布在前山水道、马骝洲水道。由于前山水道水域周围建筑物密度较大,居民区和商业区产生的生活、生产废水未经专业处理,直接排入河流,导致前山水道水体污染。马骝洲水道污染分布区域相对较集中,其中,裕安围附近九洲港货运码头、洪湾港和西域码头地理位置相对集中分布,使得附近水域的悬浮泥沙含量较大,船舶排出的有机物直接对水体造成了污染。金湾区的主要污染区域分布在洪鹤大桥和珠三角环线高速(金湾段)附近,主要是由于工程施工对附近的水域影响较大,造成了水体大面积污染的情况。
从2019年至2020年污染面积变化结果可以看出(图15),珠海市污染水体面积占比逐渐减小,其中,2019年1月和2019年9月污染水体面积分布较大,污染水体占比分别为25.11%和21.97%,主要原因为洪鹤大桥、珠三角环线高速、金海大桥工程建设造成的大面积水体污染。2020年1月,污染水体分布面积逐渐减小,仅为2.59%,一方面由于部分工程的推进减少了污染水体的产生以及居民环保意识的增强,另一方面也证实了珠海市水环境治理工作卓有成效。
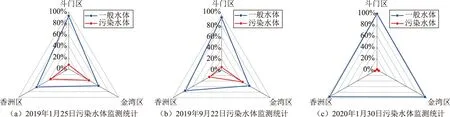
图15 不同时期各行政区水体污染水体和一般水体面积占比统计
4 结束语
通过分析污染水体和一般水体的光谱特征差异特征以及构建污染水体遥感识别算法,对珠海市内陆河流、水库进行遥感识别,得出以下结论。
1)在构建的四种污染水体识别算法中,河流污染指数识别精度最高,污染水体的识别准确率为92.59%,适用于珠海市河流、水库的污染水体识别。
2)2019年至2020年期间,珠海市污染水体面积在逐渐减少,主要污染区域在前山河道和珠三角环线高速(金湾段)。
3)由于珠海市政府网站公布的月报为月统计结果,与卫星影像瞬时过境时间存在一定的误差,使得遥感识别算法阈值不稳定以及识别精度下降。本文通过选用影像前后各一个月的月报结果对断面进行判别来减小误差。对于构建的河流污染指数是否适用于其他地区,还需进行深入探究和验证。
致谢:感谢十三五民用航天技术预先研究项目(国产卫星信息智能分发技术)为本论文提供的技术支持。