基于目标尺度的实时智能感知自适应聚变焦技术
2021-07-15程勇策乔宇晨朱向前
程勇策,李 楠,乔宇晨,朱向前
(中国电子科技集团公司第三研究所,北京 100015)
0 引 言
在光电侦察中,由于视场角和作用距离之间的矛盾,常常需要调整相机的焦距。同时,不同距离的目标成像后需要调节聚焦,以便使图像更加清晰。由于观测目标的随机性和人的视觉感受差异,尚没有一个准确的聚变焦方法能够满足所有的应用。
目前针对性的研究中,杜平等[1]实现了50~ 200 mm范围内红外4倍连续变焦,完成了对特定景物的放大缩小,且切换过程中不会造成目标丢失;潘雪娟等[2]使用了图像熵作为图像清晰度的判别函数,对红外图像的聚焦效果进行了验证;周丽平等[3]针对显微视觉系统小视场的特点,使用了频域聚焦和时域聚焦相结合的方法,提高了显微成像的聚焦正确性和稳定性;张耀军等[4]使用基于非下采样剪切波变换(Non Subsampled Shearlet Transform,NSST)图像特征实现了多个不同聚焦图像的融合,获得了结果图像,拥有更清晰的视觉效果。
本文主要针对工程中遇到的目标聚变焦问题,使用深度学习和梯度算子相结合的方法,实现光电侦察系统快速变化焦距且快速完成对焦,为光电侦察的无人化值守提供技术支撑。
1 基于深度学习的自动焦距调节系统
在光电系统中,通常需要根据目标在视场中的大小来判断焦距是否合适。其中,最重要的环节是检测出图像中的目标,并确定其范围。
1.1 基于卷积神经网络的目标检测算法
随着相关器具性能的提高,基于卷积神经网络的目标检测方法突破了传统目标检测的瓶颈,成为当前目标检测的主流算法之一。李旭冬等[5]描述了当前卷积神经网络的研究进展及常用的卷积神经网络;Lin T Y等[6]提出基于特征金字塔的FPN算法,在增加极小计算量的情况下,处理物体检测中的多尺度变化问题;Ren S等[7]提出基于R-CNN的目标检测算法,实现了准确的实时目标检测。Redmon J等[8]提出的YOLOv3算法具有小而精的特点,在保证算法准确性不变的基础上,通过减少算法输出张量的尺度,可以有效减小算法的运算量,提高算法的运行速度。本文基于YOLOv3算法,能准确识别实时视频中的目标,并对目标的尺寸与视场范围角度进行对比,对视频的焦距变化提出变焦建议,使目标在视场中保持一定尺寸,便于观察。
YOLOv3使用ResNet的残差思想和多尺度预测,使其在一定程度上可以进行不同尺度的目标识别。原始图片在预处理阶段被填充缩放至416×416的大小,作为网络输入。YOLOv3的特征提取网络结构为DarkNet53,输入图片经过DarkNet53网络降采样5次,每次产生不同尺度的特征图。YOLOv3网络结构如图1所示。

图1 YOLOV3网络结构
目标检测阶段采用多尺度融合的方式,在最后3个尺度(13×13、26×26、52×52)的特征图上分别检测。每个尺度上有3个锚点框(anchor boxes)用于检测不同规格的目标。算法按照特征图的大小(S×S)将416×416的图片划分为S×S个等大栅格(grid cell),每个栅格根据锚点框预测3个边界框(bounding boxes)。每个边界框返回两类参数:第一类为目标框信息,即目标框的中心位置与目标框的宽和高;第二类为目标的置信度,取值范围为[0,1]。 具体检测方法为:先对13×13的特征图进行卷积预测,得到第1个尺度下的检测结果;之后将13×13的特征图上采样得到26×26特征图,与网络降采样生成的26×26特征图进行特征融合后进行卷积预测,得到第2个尺度下的结果;同理得到第3个尺度下的结果。将3次检测结果进行非极大值抑制(Non-Maximum Suppression,NMS),得到最终 结果。
YOLOV3采用logistic方式,边框预测公式为:
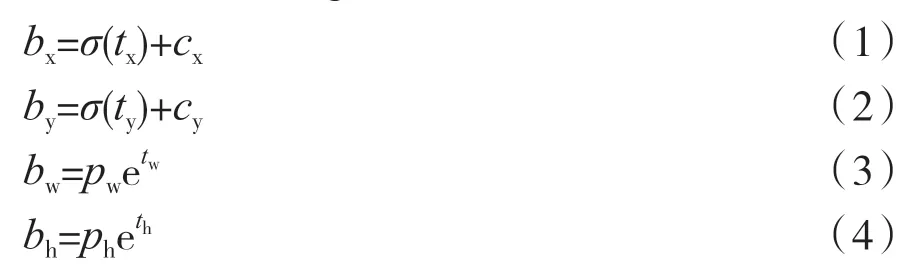
式中:cx、cy是网格的坐标偏移量;pw、ph是预设的anchor box的边长。最终得到的边框坐标值是bx、by、bw、bh,网络学习目标是tx、ty、tw、th。
1.2 基于目标检测的焦距调节算法
本算法对输入视频进行逐帧检测,获取检测目标的边界框,得到检测目标的宽、高数值。分别计算检测目标的宽、高与原始视频宽、高的比值,取两者较小值为检测目标的尺寸特征变量。若其数值小于0.6,检测目标尺寸较小,建议增大焦距,放大目标在视场中所占比例;若其数值大于0.4,检测目标尺寸较大,建议减小焦距,减小目标在视场中所占比例。
2 基于梯度的自动聚焦调节系统
自动聚焦主要包括图像清晰度评价函数、基于评价函数的图像清晰度计算方法以及自动聚焦策略3个环节。
2.1 基于梯度的图像清晰度评价函数
张宏飞等[9]提出了以图像的灰度梯度和阈值计数为基础的清晰度评价方法。在视场不变的情况下,图像清晰度最高的聚焦位置为对比度高、边缘清晰的情况。这种情况下,对应图像的边缘高频分量的信息较高。为了兼顾效率,本文使用了空域的梯度作为图像清晰度的评价标准,用来检测图像的边缘高频信息。使用拉普拉斯算子进行梯度计算,考虑X、Y两维方向:

式中:f()为像素的数值。
2.2 图像清晰度的计算方法
在实际计算图像清晰度时,需要进行条件约束,来降低噪声及干扰的影响,具体采用3个步骤进行处理:
(1)将彩色RGB图像变换为灰度图,以提高计算效率;
(2)对图像进行高斯滤波,消除图像中的椒盐噪声,降低噪声对梯度的影响,提高鲁棒性;
(3)选择计算窗口,为了避免图像成像畸变对计算的影响,本文并不进行全图像的梯度计算,而是在图像中心窗口进行计算。根据上述自动变焦的结果,目标在视场内的范围约为0.5,考虑到目标不一定在图像中心位置,因此选择0.8(w)×0.8(h)的窗口来进行梯度计算(w和h分别为图像的宽 和高)。
2.3 自动聚焦策略
自动聚焦过程即是求取变化过程中图像梯度最大点的过程。通过折半查找策略,获取梯度最大点。聚焦调节过程如图2所示。
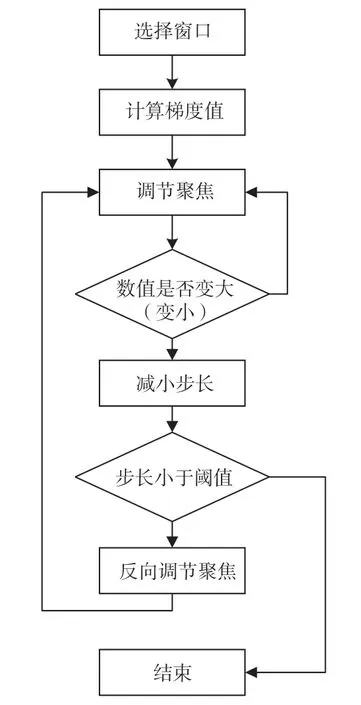
图2 聚焦调节过程示意图
其过程如下:
(1)计算当前窗口梯度数值;
(2)按照步长L1调节聚焦,重新计算窗口梯度数值;
(3)如果梯度增加,则继续调节焦距,直至梯度减小;
(4)若梯度减小,步长减半,反向调节焦距,直至梯度增加;
(5)反复迭代,直至步长小于阈值。
3 试 验
针对飞机目标进行自动变焦试验。当目标在视场中较小时,提示增大焦距,放大目标在视场中的占屏比。如图3所示。
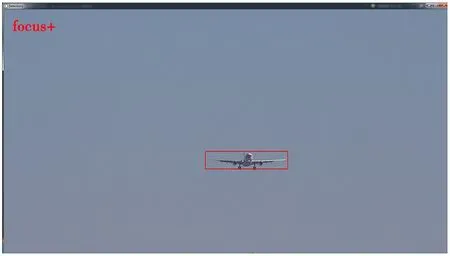
图3 检测目标较小时提示增加焦距
目标在视场中较大时,提示减小焦距,缩小目标在视场中的占屏比。如图4所示。
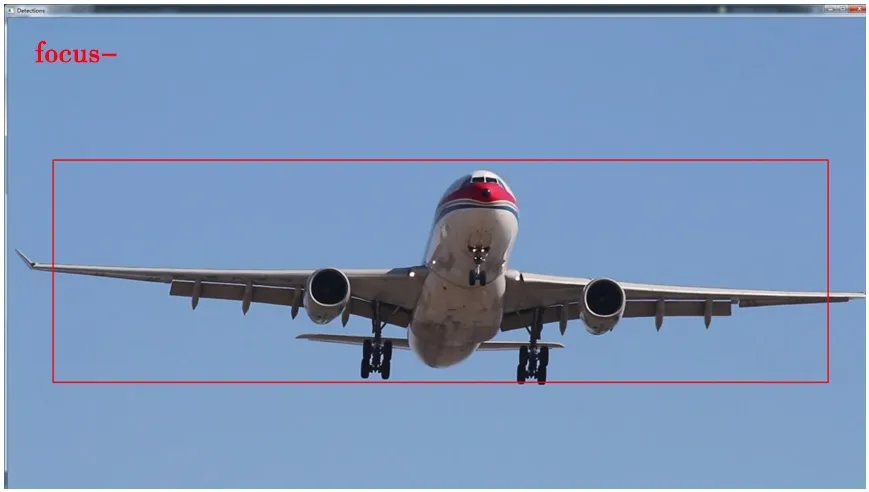
图4 检测目标较大时提示减小焦距
目标占屏比适中时,提示占屏比合适。如图5所示。
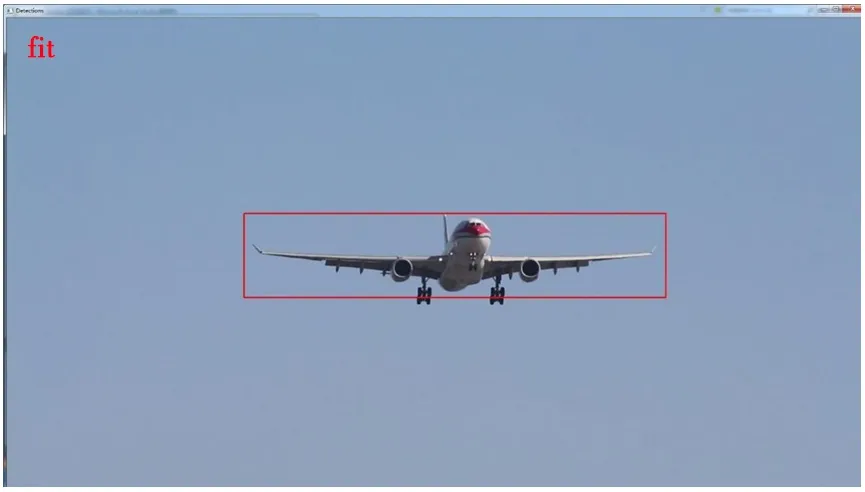
图5 检测目标占屏比合适
对图像进行自动聚焦试验,结果如图6和图7所示。从两组图可以看到,图像边缘逐渐清晰,符合人的视觉观察情况。

图6 自动聚焦试验1
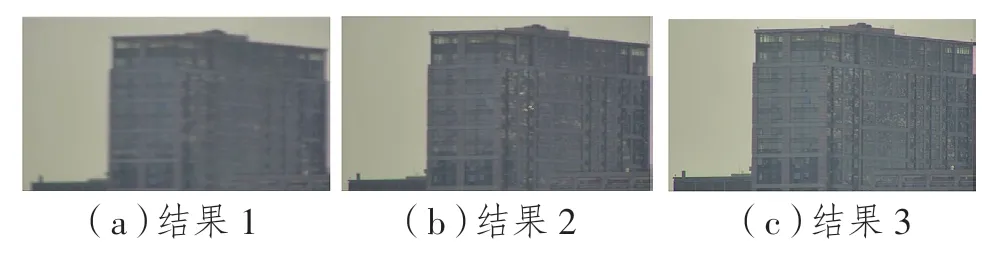
图7 自动聚焦试验2
4 结 语
本文针对工程中目标焦距不易调节和图像不清晰等问题,使用深度学习和梯度算子相结合的方法,实现了焦距自动调节和自动聚焦。通过试验结果可以看出,焦距自动调节后,目标比例合适,符合人的视觉观察;图像清晰,细节准确,可直接用于工 程实践。
