油电混合多旋翼无人机技术在铁路勘测中的应用
2021-07-15邢玥,郭磊,刘畅
邢 玥,郭 磊,刘 畅
0 引言
目前,无人机行业中多数航测设备厂家研发的测绘无人机为固定机翼结构,该结构无人机体积较大,日常作业需要3~5人的团队,便携性较差,且起降受场地限制较大。部分厂家研发多旋翼结构测绘无人机[1],但由于续航时间较短,不适宜铁路行业长距离、长航时应用。目前无人机测绘[2,3]专业程度较高,操作复杂,需要专业团队操作,不能满足用户自主使用的要求。
本文对固定机翼结构测绘无人机和电动多旋翼测绘无人机的优点进行技术融合,以实现现场高质高效的航测数据收集,使数据达到共享互通,设计人员无需耗费大量人工及时间成本进行现场踏勘,在办公室就可以获得现场测量数据,并对收集到的现场数据进行汇总、浏览,满足铁路测绘高精度的需求,大大提高了数据的精确度、时效性,确保铁路设计的高效率和准确度。
1 方案设计
依据现有航测无人机设备结构特征进行方案设计,主要研究内容及攻关目标如下:
(1)实现高效率、长航时、高安全性的目标。无人机的供电部分采用航空汽油发动机搭载发电机经变压整流为全机提供电力,利用锂电池作为后备电源。从目前动力型锂电池行业整体技术水平来看,单位重量下能量密度尚未超越传统燃料,因此采用内燃机提供电力在相同载重及续航下效率更高。同时动力型锂电池虽然重量较轻,但寿命相对较短,不稳定因素较多,因此利用内燃机发电驱动电机巡航,锂电池仅作为恶劣天气下内燃机功率不足以巡航时的后备电源及故障情况下的备用动力,较单一能源方式更加安全可靠。
(2)系统需具备易操作的特点。抛弃传统无人机需要人工实时操作的遥控器,基于模块化设计将所有控制设备整合于控制站,利用控制站及自驾仪,设置航路坐标、高程、重叠率等,实现无人机完全自主起降、自主飞行,无需人工实时操作。
(3)满足铁路测绘高精度的需求。为满足测绘高精度的需求,应具备高像素、低延时、结构简洁、抗震性强、通信可靠、控制灵活、接口规范等特点。
本设计采用数码相机CCD成像技术[4,5]进行数据记录。系统的硬件部分由探查系统、无人机遥感平台、数据传输装置、地面控制站单元、数据管理中心组成,如图1所示。

图1 油电混合多旋翼勘测无人机系统整体架构
1.1 硬件设计
(1)机身本体。机身采用四旋翼结构,整体结构均由碳纤维材料构制而成,机架、支臂、起落架等皆为轻强结构设计。中心采用3K碳纤维管为主体,上部为碳纤维制燃油箱固定板,下部为碳纤维制电池固定板。电机架采用7075铝合金CNC加工而成,机臂采用伞式折叠结构,折叠关节采用卡隼固定,展开方便快捷。机身本体如图2所示。

图2 机身本体
(2)数传系统。由于测绘任务多、面积大、距离远,为此选择专业的数传系统,功率1 W,频率800 MHz,以完成双向数据传输任务。双向数据传输的测控链路能可靠实现飞行数据下传和获取飞行参数。
(3)飞控系统。飞控系统由主控芯片、稳压芯片、姿态传感器、磁力计、气压计、存储器、USB串口、直插排针等组成,系统示意如图3所示。飞控系统可将飞行器的姿态、位置、高度、速度、航向以及动力电压等数据参数通过测控链路实时下传至地面工作站,提高信息获取效率。
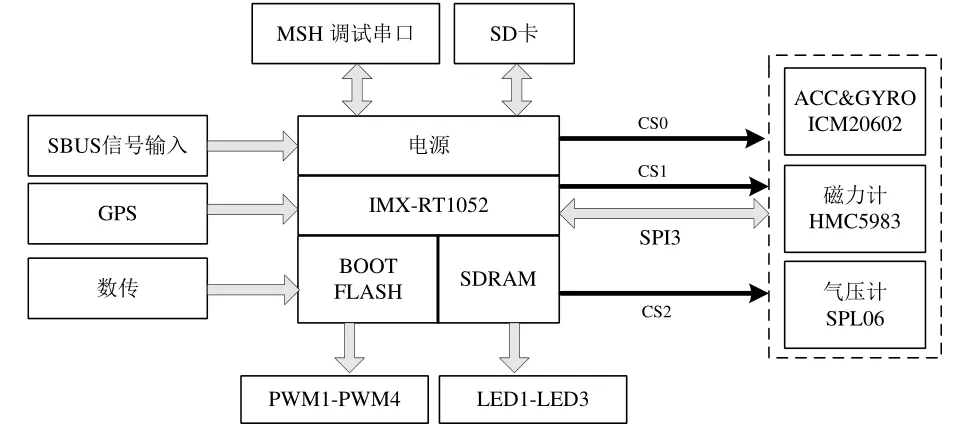
图3 飞控系统硬件示意图
(4)动力部分。动力部分选择日本小松32cc航空燃油发动机,上部通过减震橡胶与机身本体相连,发动机曲轴输出端固定连接2 000 W变频发电机线圈输出,并通过稳压整流器转换为44.4 V直流电,为电动机提供动力,增加航时的同时可提高测绘效率。发电机部分采用高集成、易检修模块化设计,安装、调试、检修实现一步到位,设计如图4所示。
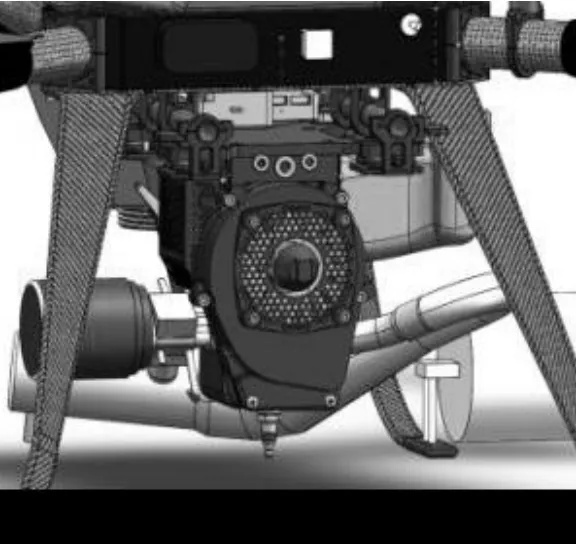
图4 发电机设计
整套设备均采用模块化设计,具有较强的可扩展性,可方便地实现各设备部件的更换,满足电力巡检等业务的需求,适应业务量、业务流程的扩展。设备具备多种应急自动处理机制,包括低电量、发动机熄火、下降速度过快、数据链中断、GPS信号丢失、姿态超限与角速率超限等异常保护,进一步提高安全性。在机载电池电压不足时,会发出报警(在遥控器和地面站上均会发出报警),提高了安全性。
1.2 无人机控制系统设计
无人机控制系统由于其组成复杂,且户外作业时的恶劣环境大大影响了控制系统的可靠性。为实时、可靠、有效地控制无人机,提出模块化整合无人机控制系统,如图5所示。

图5 无人机地面控制站单元系统结构
外部以防水、防尘、防摔的三防安全箱保护,预留了RTK、图传馈线以及USB接口,并在内部设计了双重散热风道,确保不影响整套控制系统的正常稳定运行。同时为了更直观地观察到实时影像,该设计在控制系统中加入了1.2 GHz实时影像图传以及图传摄像头,方便日常巡检等任务。
1.3 数据采集相机自稳云台单元设计
由于采用内燃机为动力,内燃机产生的震动成为影响采集精度的主要因素。为此,设计了可满足精度要求的云台组。
首先设计了云台固定架,固定架采用航空级7075铝合金材料,下部安装板采用碳纤维复合材料,表面采用阳极氧化处理,并进行轻量化处理,以保证整体刚性与强度。上部固定采用碳纤维管材吊装、抱箍结构固定的方式,稳定可靠,同时该框架式结构也可防止运输移动过程中因意外发生磕碰相机的情况。云台固定架与相机如图6所示。
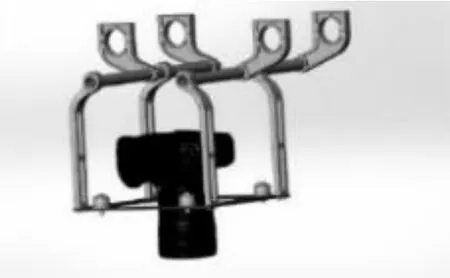
图6 云台固定架与相机
自稳云台本体采用三轴结构,使用碳纤维复合材料及轻质高强度7075铝合金CNC加工,抗震性强;自稳伺服机选用高速无核伺服机,角速度最快可达到7.476 rad/s,控制灵活,俯仰动作、横滚动作、航向动作均可实现及时纠偏,并根据相机规格设计了固定夹具。动作部分选用了高角速度伺服机,以齿轮传递结构连接至云台。云台下部与云台固定板之间装有4只滤波减震橡胶,进一步有效过滤、降低震动,如图7所示。

图7 自稳云台单元
2 试验验证
设备研制完成后,组织了设备验收及测试,并对距离、面积等测量数据的精度进行了验证。通过实时遥感影像传输,获取相应坐标高程参数及高精度数据,还可进行数据计算,同时提高了数据处理的效率。
2.1 试验验证1
首先在铁路线路附近拍摄约3 km2的实时地形信息,并获取相应坐标高程参数。经过实地测量,该路段路灯杆间距为50 m,利用无人机航测获取的数据为49.999 m,相对误差为0.1%,满足高精度测距的精度要求。
2.2 试验验证2
在集通电气化改造工程项目好鲁库220 kV牵引变电所选址中,利用研制的无人机对现场周围环境进行勘测,设定6处路径,将获得的数据分别与人工现场测距进行对比,对比数据如表1所示。结果表明,无人机测试距离误差小于5%,满足工程选址精度要求。

表1 测量数据误差对比数据
3 经济效益分析
研制的油电混合多旋翼无人机于2019年8月在京广铁路电气化工程改造项目中进行了现场实地勘测与测量。经统计,采用该方式较传统方式累计节约成本12万余元,经济效益较好。
4 结语
本文研究在传统多旋翼无人机设备的基础上,重新构建新型油电混合多旋翼无人机勘测设备设计方案,采用系统集成、模块化设计思路,最终实现了全部航测数据的共享互通,极大提高了铁路工程勘测的作业效率,并在工程项目中得到了实际应用,获得了良好的经济效益。