基于PLC的矿井提升控制系统应用
2021-07-14张建锋
张建锋
(中煤科工集团重庆研究院有限公司,重庆 400039)
0 引言
随着国家对煤矿资源的大量开采,矿用提升机作为煤矿生产中关键设备,在矿井中人员及物料和设备输送等方面发挥着重要作用。同时也能将开采好的矿石和矸石运输到地面,是矿井生产过程中极其重要的一部分,提高整套控制系统的综合性能至关重要[1]。针对提升机作业调速问题,目前主要采用增加调节电阻方式进行设备调速,存在调速范围窄、调速精度低等问题,已无法满足当前提升机在矿井中的智能调速需求,不断开展提升机控制系统的优化改进,成为当前的研究重点方向。
为此,本文设计一种以PLC为控制核心的矿井提升系统,解决了传统提升中的不足。该系统主要由PLC控制装置、提升调速系统及安全监测等部分构成[2]。在详细设计提升机控制系统需要的硬件部分基础上,利用相关软件编写程序,实现了对提升运输机的有效控制。
1 矿用提升机调速机理分析
调速功能在提升机中应用的较为广泛,其调速的目的主要是通过对其运动速度与时间的变化关系来是实现调节,找到速度随时间的变化规律,由此所形成的变化曲线称之为提升机速度变化图,如图1所示。图中,t0为初始加速度阶段,t1为主加速阶段,t2为恒速阶段,t3为主减速阶段,t4为平稳过渡阶段,t5为制动阶段,θ为停车阶段。当前,整个提升机的调速过程主要按照此变化规律来进行调节,而速度的变化则主要通过电机的转速调节进行实现,其计算公式为:

图1 提升机速度变化

式中:f为供电频率;n为转速;p为磁极数;s为转差率。
2 系统硬件设计
提升机控制系统中的核心是PLC和变频器[4],PLC选用的是西门子公司的S7-300,CPU模块将收集的信息进行计算、判断及处理,并向执行单元发出相应的数字信号和模拟量信号控制指令,同时,该控制器中的通信模块具有远程通信的作用,能满足提升机远程操控的需求。S7-300控制器中配备了多个开关量输入和输出接口,数据之间通过RS485进行信号传输通讯,内部的JD-BP37/38系列变频器则采用了BUS协议,可通过调节电机的转速来实现对提升机输出功率及运行速度的控制,控制器的实物如图2所示。

图2 S7-300控制器实物
3 系统软件设计
3.1 安全保护模块
由于提升机在作业过程中经常出现超速、弹簧疲劳、变频器故障等问题,为提高提升机作业过程中的安全性,在整个控制系统中设计了安全保护模块。该保护模块首先将对提升机运行时出现的故障进行诊断检测,针对出现的不同故障问题及时发出相应的故障报警提示和故障发生位置,并在显示面板中进行了故障实时显示,同时切断相应的电源系统,人员只需通过提示的故障进行故障检修及排除。以此达到智能保护提升机作业安全的目的。该模块控制流程如图3所示。

图3 双闭环调速系统的转速波形
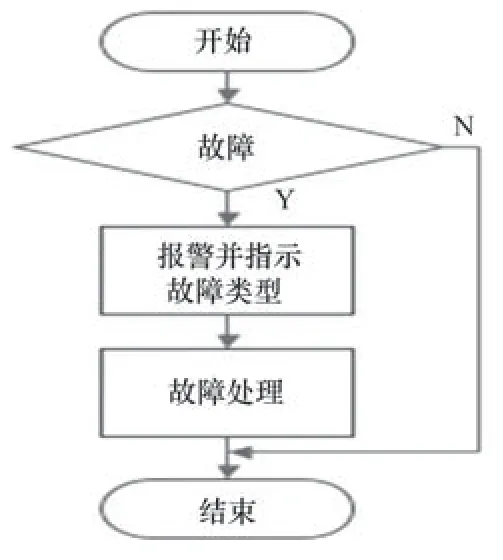
图3 安全模块控制流程
3.2 模拟量模块设计
各类传感器会将采集相关信息及时传输出来。因而,在CPU接收信号之前,需经过专门的模拟量接收模块进行信号接收,并将接收的信号通过A/D转换器进行电信号向数字信号的转换,发送至CPU处理器中。CPU处理器在进行数据的分析、计算及处理时,若发现相应的参数超过设定阀值,在会发出相应的报警提示,若参数正常则进行参数的实时显示。模拟量模块的控制流程如图4所示。
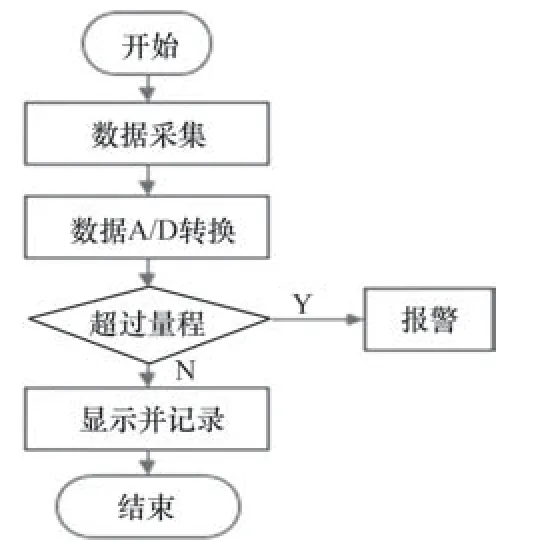
图4 模拟量模块设计流程
3.3 上位机显示界面设计
为实时、直观地掌握提升机运行参数及故障情况,采用了MCGS组态软件对提升机控制系统的上机位显示界面进行了设计,通过显示界面,可对设备的运行状态及相关参数进行实时显示及控制,是人员掌握设备状态的重要窗口。在显示界面中,能将提升机的作业功率、运行速度、故障类型、作业温度进行实时显示,人员可通过显示界面中的按钮进行状态查询,整体智能化程度相对较高。
4 模糊自适应整定PID在提升机系统中的运用
4.1 模糊控制原理
模糊控制是一种新型的控制方式,主要将成熟经验及专家知识等通过收集、整理后形成一种模糊化的控制信号,相应执行器在接收到此信号后,经过内部的模糊推理和计算,执行相关模糊化控制,实现整个环节的智能化闭环控制[4]。而整定PID则主要是利用此控制原理进行控制操作。
4.2 模糊自适应整定PID
PID控制在工业控制中应用的较为普遍,主要通过内部的微分、积分、比例等方式进行不同功能的调节,其中,通过比例调节来改变提升机的运行速率,通过积分调节来消除速度变化误差,通过微分调节来修正速度的变化趋势,以此实现整个提升速度的有效控制[7]。结合提升机运行特点,在此处PID控制中,选取了误差和误差变化率作为输入控制量,通过控制器对其两输入量的信号收集及模糊化计算与判断,使其转为可识别的控制量,结合自身的模糊控制及误差修正技术处理后,得到最佳的修正量参数,最后再与PID初始参数进行比较,以此得到最新的PID参数,更好地实现对提升机的实时控制。
4.3 模糊自适应整定PID实现方法
结合S7-300PLC控制器中的程序编程软件STEP 7,采用了离线控制方式,通过将控制语言制作成表格的形式,存储在S7-300的存储器中,工作的时候通过查表的方式找到PID参数,给到PID控制器中,实现整个系统的控制。
5 控制系统的应用评价
在完成该控制系统的总体设计后,为进一步掌握该控制系统的可靠性及稳定性,将该系统在矿用提升机中进行了应用测试,测试周期约为5个月。在此期间,该控制系统运行良好,与原来的单片机或PID控制相比,提升机的控制精度及灵敏性均得到明显提升,提升机在加速、恒速及制动减速等环境的稳定性也大大提升。在此测试期间,整套系统未出现故障异常现象,据人员统计,提升机因电气故障产生的停机时间缩短了将近70%,在减少提升机维护成本基础上,也降低了人员的劳动强度,实现了提升机自动化的稳定运行。由此验证了该控制系统能更好地满足提升机的现场生产需求。
6 结束语
分析目前煤矿提升系统,发现其存在消耗高、故障率高、控制不灵活的问题,影响提升的运行稳定及可靠性,不利于设备的高效运行及井下作业安全。而不断将当前成熟的自动化控制技术应用到提升机的生产作业中,成为当前重点任务。为此,完成了基于PLC控制器的提升机控制系统硬件及软件分系统设计,大大提升了提升机的控制精度及控制准确性,在煤矿中运用本系统,实践证明本系统相较于模糊控制和PID控制单一控制,在性能上比较突出,能更好地满足现场生产的需求。
