电动载物台结构及控制系统设计*
2021-07-14张龙旭刘丰源张江涛李柏炎
张龙旭,刘丰源,张江涛,李柏炎,冯 琦,张 闫
(哈尔滨理工大学荣成学院,山东威海 264300)
0 引言
随着社会的发展和市场竞争的不断加剧,企业生产线的智能化需求变得越来越迫切[1]。智能化生产的关键在于产线的检测和纠错功能,这部分目前大部分仍然依靠人工完成,现有检测设备大都是为单独检测的个体而设计,不容易直接应用于生产线的改造升级。本文将滑台与视觉检测技术相配合,完成零件运送和位置调整功能,有利于生产线自动检测的实现。专用电动滑台的发展,直接影响到相关制造、检测行业的改变,很多国家都注重在此领域的研究,随着“中国制造2025”的提出,我国对该领域的发展也越来越重视,对专有电动滑台的研发和投入,将直接提高我国多行业的发展。
目前,国内电动滑台相关领域发展态势良好,但是相关产品制造成本高,存在价格等方面的短板,据调查,相关产品售价均在万元以上,且为配套销售。此外,存在自动化程度不高、结构单一、使用方向窄等问题,只可应用于单一方面,性价比没有优势。虽然有相关人员研究过类似产品[2],但该类产品往往会根据需求的不同相应做出不同的调整,即使有相类似的部分,也需要另行研究,因此,需要在现有基础上设计一套适合具体生产生活要求的产品。本文所设计的一款滑台用于三维测量仪,精度较高,具有二自由度,可以根据实际需求来进行相关调整,以达到满意的使用效果。
1 电动滑台结构设计
1.1 总体设计
对滑台而言,总体设计方案主要是X、Y方向2个坐标的传动,根据需要,一般采用点控制,为了确保系统的工作效率,工作台采用滚珠丝杠螺母对和滚珠导向装置,以减少齿侧间隙的影响[3]。该项目使用电驱动装置,该装置将电动机的旋转运动转换为滑台的线性往复运动。滑动台的线性往复运动是通过控制电动机的正向和反向旋转来完成的。例如,各种杠杆、摇杆和其他机构用于完成旋转、摆动和其他动作。整体三维结构如图1所示,主要由机械驱动系统、上下滑盖板、滚珠丝杠及丝杠螺母组成。

图1 电动滑台整体结构
1.2 机械系统设计
机械系统主要由水平(X、Y轴)驱动系统构成。水平驱动系统使用2个并联的线性驱动单元,减速器由交流伺服电机驱动。为了确保2个线性驱动单元的同步,使用轴连接2个线性驱动单元。
1.3 丝杠螺母
丝杠螺母机构也称为丝杠驱动机构,其主要用于将旋转运动转换成线性运动或将线性运动转换成旋转运动。
螺母分为滑动摩擦机构和滚动摩擦机构。滑动螺钉具有简单的结构和自锁功能,但是其抗摩擦扭矩大且传动效率低。滚珠丝杠是一种非常有效的传动元件,其最大的优点是摩擦阻扭矩小,传动效率高,可达90%以上,具有精度高、可逆性强的特点[4]。
1.4 加强台面
平滑平台和加强平台通过多个螺钉紧密连接,可以近似地彼此之间没有相对滑动,并且可以在弯曲和变形时整体上近似。加固工作台的材料不同于水平滑动工作台的材料。中性轴不超过组合截面的质心。根据两者的弹性模量之差,确定中性轴的位置,然后计算该截面相对于中性轴的惯性矩和抗弯强度。图2所示为抗弯模量计算坐标系,显示了其横截面结构,其中h1为增强工作台面的厚度,h2为肋的高度。

图2 抗弯模量计算坐标系
由截面的惯性矩公式推出截面抗弯模量表达式,计算h1与h2不同取值时截面对中性轴的抗弯模量,以确定滑台表面的抗弯强度与刚度。
重力物体振动试验时,与加强台面链接。在振动试验过程中,重力物体在各自质心处受惯性力作用,在台面产生弯矩[5],生成如图3所示的挠度求解简化模型,其中,M1为重物在惯性力作用下对台面产生的弯矩,M2为振动在惯性力作用下对台面产生的弯矩。

图3 挠度求解简化模型
水平滑台受到的总弯矩:

式中:m1、m2、L1、L2分别为上下板质量及水平长度;a1、a2分别为上下板横截面积。
其挠度变形为:

式中:M为水平滑台受到的总弯矩;E为弹性模量;I为惯性矩;l为力学模型简支梁的总长度;b为电动滑台下端面外缘半径。
2 电动滑台控制系统设计
2.1 控制系统组成
该控制系统主要由STC89C51单片机最小系统、驱动电路模块、按键电路模块、数字管显示电路模块和步进电机组成。考虑到驱动器芯片替代了ULN2003A芯片,ULN2003A芯片是一种高压、大电流驱动器芯片,内部装有7个硅PNP达林顿管。
STC89C51单片机向ULN2003A输出脉冲信号,驱动芯片放大脉冲信号的电压和电流,驱动步进电机的各相绕组,使步进电机通过不同的脉冲信号执行相应的动作。系统结构如图4所示。

图4 控制系统组成结构
2.2 控制系统总流程
工作时,系统初始化后判断是否进行中断,当执行中断后,检测是否有数据传输或按键动作发生;当检测到输入时,系统接收识别相关指令,判断是否按下方向键或数字键,并执行相关子命令。控制系统总流程如图5所示。

图5 控制系统总流程
2.3 步进电机驱动电路
本滑台采用L297型号步进电机进行驱动。由于L297的输出电压与输入电压相比有一些损耗,当输入为5 V时,输出约为4.10 V,无法达到步进电机的驱动电压。因此,L297和ULN2003A(驱动)的组合可用于形成步进电机驱动电路。
由于四相八拍步进电机的脉冲序列是A-AB-B-BC-C-CD-D-DA,因 此L297也 可 以 提 供A-AC-C-BC-B-的脉冲信号BD-DA,只需要稍微调整一下接线,即可使连接到步进电机的连接器上的脉冲信号满足28BYJ-48电机的脉冲序列。
将微控制器的P3.0端口与L297的CLOCK连接,为L297提供时钟信号。P3.1端口与L297的方向控制端口相连,控制步进电机的正向和反向。P3.2端口与L297的RST连接,控制步进电机的启动和停止。将L297的启用端子(ENABLE),电源端子(VCC)和半步/全步模式选择端子(CW/CCW)连接到高电平。斩波功能控制端子(CTL)和GND连接到低电平,以确保芯片输出四相八拍脉冲。A、B、C、D的4个输出端子分别连接到ULN2003A的输入端口1~4。ULN2003A的1~4个输出端口根据28BYJ-48电动机的脉冲序列分别连接到XH-5A连接器。在滤波方面,1个0.1μF的电容器连接到每个集成芯片的VCC和GND端子,以增强驱动电路的稳定性[6]。具体驱动电路如图6所示。
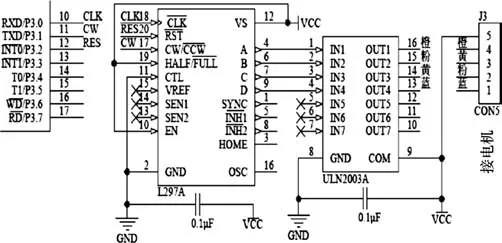
图6 步进电机驱动电路
2.4 复位程序
常见的硬件复位方式有2种[7],上电复位和手动按钮复位。相较另外一种复位方式,通过按键对单片机的复位进行控制是相对稳定的,因此采用手动按钮复位的方式。
系统检测是否有复位命令,如果没有按键动作发生,继续扫描按键输出端,直到检测到按键动作发生。当系统检测到按键动作发生时,系统首先检测减速传感器是否有信号;如果没有,则向加速按键方向运行检测判断,并最终执行相关子程序;当系统检测到正反转按下的信号后,取反正反转标志,并判断反转标志是否为0。如果是正转则取正转码执行子程序,调节电机速度,反转过程与正转过程相同[8]。复位程序流程如图7所示。

图7 控制系统复位程序总流程
3 结束语
设计一款高精度电动滑台,具有X、Y两个自由度,主要设计部分为机械结构以及控制系统。其中结构由滑台底板、滚珠丝杠、步进电机等构成。控制系统使用STC89C51单片机模拟控制电路程序,通过串口及无线通信模块,完成对单片机控制信号的输入;通过电机驱动电路,控制该步进电机组的协调运动,完成滑台的位置移动,但由于自由度低且结构尺寸的特殊性,会造成应性下降。
