改进的BP神经网络在车辆目标识别中的应用研究
2021-07-14刘路
刘 路
(桂林航天工业学院,广西桂林 541004)
0 引言
近年来,智能识别和人工神经网络一直都是热门的研究方向,先后有谷歌、百度、华为和阿里巴巴等知名企业加入到其研发的队伍行列中。人工神经网络的研究涉及多学科多领域,应用范围也非常广泛,并在不断地扩展变宽,包括智能识别、模型构建、序列分析和生产控制等。在人工神经网络的研究领域,最热门的研究对象当属神经网络的学习算法,其中,对前馈神经网络学习算法的研究尤为深入,而BP神经网络是前馈神经网络中最具代表性的网络,对其改进优化的研究也是当今的热点之一。
目前,遥感图像下车辆目标的模式识别系统多数采用的是传统BP神经网络,传统的BP神经网络算法是基于梯度的最速下降法,因而存在固有的缺陷,如网络训练易陷入局部极小值、学习过程收敛速度缓慢、网络的结构难以确定、所设计网络泛化能力不能保证等,这些缺陷一定程度上影响了车辆目标模式识别系统的识别效率和准确度。李友[1]提出将含有车辆的道路从卫星图像中截取出来,结合灰度等纹理特征和BP神经网络的方法检测车辆目标。陈雪云[2]针对传统BP神经网络学习效率低下的问题,提出采用单纯性体积纹理算子优化训练样本,减少训练成本。本文提出采用随机梯度下降法和深层滑动神经网络算法对传统BP神经网络进行改进,能有效提高车辆目标识别系统的识别速度和精度。
1 传统的BP神经网络算法
传统的BP神经网络算法聚焦的对象是其网络闭值和权值的学习[3],概括来说BP神经网络的学习过程主要是由信号正传播和误差反传播这两个过程构成。信号正传播过程,首先是输入信号从输入层经隐含层,传递至输出层,从而在网络输出端产生关联信号,若在输出端所产生的关联信号与期望相差过大,则进入到误差信号反传播过程;误差信号反传播过程,与信号正传播过程相反,误差信号由输出端开始反向逐层回传,回传过程中每层网络的权值由误差信号进行修正,使输出端的实际输出信号在通过对网络权值的多次修正后更接近期望值。BP算法的步骤如下。
(1)初始化权值:对权值矩阵赋随机数。
(2)假设当前计划输入为p个样本,从1号样本开始,逐个输入学习样本至P号。
(3)按从输入层到输出层的先后顺序,计算网络各层的输出信号。
(4)求各层的反传播误差信号:

(5)记录已学习过的样本数p。如果p<P,转到第二步继续计算;如果p=P,转到步骤(6)。
(6)按权值修正公式修正各层的权值和阈值。
2 改进的BP神经网络算法
深层滑动神经网络是一种新颖的深度学习方法[2],其聚焦于若干局部关键区域,通过局部识别整体,因此不需要做全域的卷积,从而降低了计算量。深层滑动神经网络包括2个部分:特征提取部分和1个分类器部分。其特征分类器部分和传统的BP神经网络一样,都是由感知器构成;特征提取部分由2种网络层交替组成:候选窗定位层、特征提取层、候选窗定位层、特征提取层……,每2层循环1次。
深层滑动神经网络与BP神经网络除结构外最大的不同是输入对象的不同。深层神经滑动网络特征提取部分是用候选窗提取出的目标特征[4],并作为分类器输入。分类器就是BP神经网络,是利用随机梯度下降法改进BP神经网络,BP算法的改进过程如下。
传统BP算法在调整权值时候,训练易陷入局部极小值,学习过程收敛缓慢,时常出现训练过程发生震荡的情况。为了提高网络的训练速度,可以从权值调整这一环节出发,引入误差函数:

调整θ值,使得误差函数最小化。误差函数J(θ)构成一个曲面或者曲线,目的是找到该群面的最低点。随机梯度下降法的内核在于可以假设站在误差曲面上的随机一点,若要想以最快的速度从该点达到误差曲面的最低点,则要沿着坡度最大、最陡的路线行进,即梯度的反方向,本质上就是一个求偏导数的过程:

参数θ的更新过程可以描述为:

上述过程和传统BP神经网络所使用的最大梯度下降法[5]相同,但在输入样本这一环节随机梯度下降法和最大梯度下降法有所不同,最大梯度下降法输入样本采用的是顺序输入样本的方式;随机梯度下降法采用的是随机选取样本的方式[6],把原样本排序充分打乱后随机挑选样本作为输入,这也充分体现了该算法的随机性。改进后的BP神经网络运算流程如图1所示。
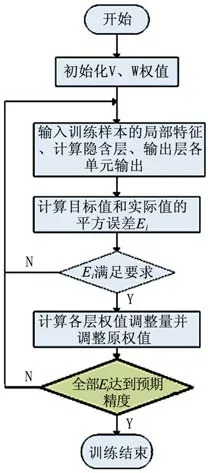
图1 随机梯度下降法流程
利用随机梯度下降法改进后的BP算法的运算步骤分成以下几步。
(1)初始化权值矩阵。
(2)对权值矩阵赋予权值调整量ΔW。
(3)随机选择样本的局部特征作为输入。设置样本计数器p。
(4)计算隐层、输出层各单元输出。
(5)计算目标值和实际值的平方误差。
(6)若ΔEi减小,则计算各层权值调整量并调整权值;否则,返回步骤(2)赋予新权值调整量-ΔW。
(7)记录已学习过的样本数p。如果p<P,转到步骤(2)继续计算;如果p=P,转到步骤(6)。
3 基于改进的BP神经网络的车辆目标识别算法
基于改进的BP神经网络的车辆目标识别算法,主要技术手段是运用候选窗特征提取算法提取出目标车辆局部特征值,输入到采用随机梯度下降法改进后的BP神经网络进行训练,从而达到通过车辆局部特征识别整体的目的。
3.1 候选窗定位车辆目标
(1)确定候选窗口的尺寸
用于对改进后的BP神经网络进行训练的图样尺寸为21×21像素,所以候选窗口的尺寸大小和图样大小保持一致,也为21×21像素。
(2)定义初始变量
读取图样,确定其大小为m×n后,定义行变量i和列变量j,初始值都为1。
(3)候选窗的循环检测
候选窗的检测顺序遵循从上至下、从左到右的原则进行逐个检测,循环往复。检测过程中,依据候选窗的识别定位结果,若识别为车辆目标,则候选窗对该图样进行记录;若识别为非车辆目标,则越过该图样继续检测下一图样,直到所识别的图样为车辆目标后,对图样进行记录。
3.2 提取车辆局部纹理特征
在定位好的候选窗中,选取像素点(X,Y)作为圆心,设置采样圆半径R,一般选取候选窗中心像素点为圆心。以圆心作为顶点,连接任意2个采样点(2个采样点与圆心不能构成直径)围成三角形,共有个三角形,利用秦九韶海伦公式计算所围成的各三角形面积和圆域内所有三角形区域内灰度变化,找出差值最大的点,置该点对应位置为1,否则置0。统计区域内灰度变化差值最大点的数目,得出直方图特征。
3.3 BP神经网络的训练
把候选窗提取出的局部纹理特征送入改进的BP神经网络进行训练,通过随机梯度下降法观察误差减小曲线,也可以通过调整图像尺度,隐含层数,隐含层节点数和学习速率,使得网络具有获得较高精度的识别能力。
4 实验分析
4.1 建立和标定数据库
样本数量对神经网络的训练效果有较大程度的影响,若训练样本数量的选取过少,会导致网络处于欠学习的状态,影响神经网络的识别能力;反之,若样本数量选取过多,不仅会增加训练成本,还会网络发生过学习现象[7]。因此,训练样本选取的关键在于尽可能挑选最具有代表性的样本,以避免欠学习和过学习现象的发生,也可以节约训练成本。
本文所采用自行建立的车辆目标数据库为包括63张像素大小为1 368×972的照片,包含6 771辆汽车,所有的照片都具有相同的分辨率,均采自谷歌地球的美国旧金山市区。图像中各车辆车身的长度约为42~58个像素,宽度约为30~40个像素。由于图片中的车辆目标都是由一系列的像素点集组成,因此车辆周边环境对检测结果的准确性具有一定程度上影响。对此,样本的采集需要包含多种车辆情况,例如单一车辆、屋檐下的车辆、道路旁的车辆和被树木和其他建筑阴影遮挡的车辆等,所选取的图样需要包含车辆识别中绝大多数典型的车辆环境情况。采集的图片如图2所示。
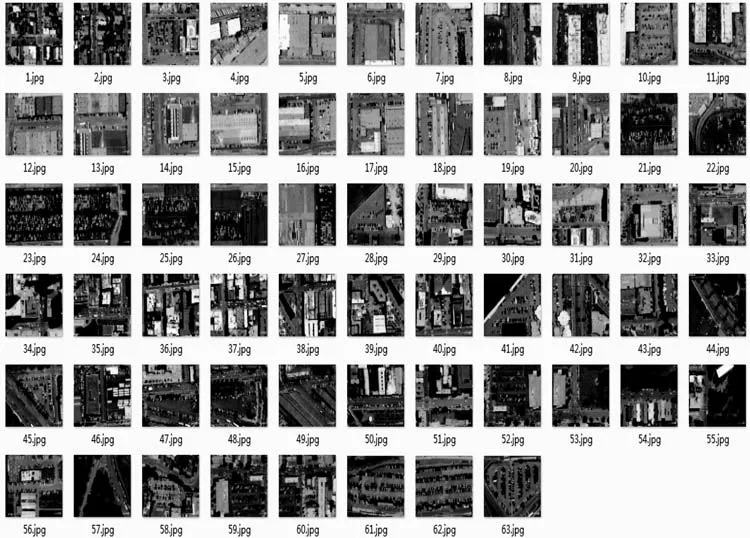
图2 采集的遥感路面
采集好图片后,对图片里同一目标和非同一目标进行双点标定处理。对同一目标的标定,采取首尾标定的方式,即在头和尾处各点一点进行连线;对非车辆样本,采取垂直均匀标定的方式,标定的两点以两目标之间最明显的特征边界为中心,在特征边界中心点两旁取距离相等的两点进行标定,同时标定的两点必须要在不同目标上。具体做法如图3~4所示。

图3 同一目标的标定

图4 非同一目标的标定
标定完成之后,选取3 000个标定好的同一目标样本作为正样本,建立正样本数据库。选取3 000个标定好的非同一目标样本作为反样本,建立反样本数据库,生成样本数据库库的图像大小为21×21。
4.2 BP神经网络的优化实验
由于实验设备的限制,本次实验是从之前建立好的样本库中随机选取200个正样本和200个负样本作为训练样本,选20个正样本和20个负样本作为测试样本,图像尺度均为21×21,每次输入图像个数设为1,核函数选tanh核,隐含层数设为3,隐含层节点数为5,初始化步长为0.05,学习速率为0.02,迭代次数为4 000次。分别采用传统的BP神网络和改进后的BP神经网络进行实验,计算各自的识别精度,绘制出误差曲线,如图5~6所示。图5显示测试误差为11,识别精度为72.5%。图6显示测试误差为6,识别精度为85%。由此可见,随机梯度下降法改进后的BP神经网络具有更加理想的精度和识别能力[8]。
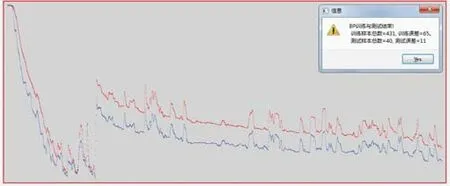
图5 传统BP神经网络的实验误差曲线

图6 改进的BP神经网络的实验误差曲线
5 结束语
本文针对传统BP神经网络所表现出的缺陷,如易成局部极小而得不到全局最优、训练次数多、学习效率低、收敛速度慢,提出用随机梯度下降法改良传统BP算法。中心思想是对误差函数求偏导,把该偏导作为权值更新量生成新权值。本文所提出的改进的BP神经网络的车辆目标识别算法,经实验证明,由该算法训练所得的BP神经网络相比于传统的BP神经网络,前者具有更高的识别精度,计算速度明显高于传统的BP算法,而且训练过程不会发生大幅度振荡,不会影响到收敛速度。
