直流调速系统神经模糊自适应控制器设计
2021-07-14王立红
王立红
(辽宁工业大学电气工程学院,辽宁锦州 121001)
0 引言
直流调速系统具有过载能力强、起制动转矩大、易于平滑调速、动静态特性好等优点[1],在工业生产、日常生活、交通运输以及国防领域都有着广泛应用[2]。传统的直流调速系统采用PID控制,这种方法成熟简单,但是控制精度取决于被控对象的模型精度[3]。王松林等[4]对双闭环直流调速系统进行了改进,转速调节器采用模糊控制方式,电流调节器仍然是传统的PID控制,有效减小了系统初始的冲击电流,提高了系统的响应速度。于建国等[5]提出了一种增益自调整的神经元PID控制方法,有效改善了系统的动静态特性,使系统具有更好的自适应性和更强的鲁棒性。本文将传统PID控制、模糊控制和神经网络控制的优点融合在一起,提出一种神经模糊自适应控制器作为转速调节器,电流调节器仍采用PID控制。仿真结果表明,该方法可以有效抑制系统超调量,减小扰动的影响,提高系统的鲁棒性。
1 双闭环调速系统
为了满足系统在达到稳态时转速误差为0,又能够实现快速起制动、突加负载时动态速降小,必须按照要求控制动态过程的电流或转矩,所以在系统中设置了2个调节器,分别调节转速和电流,二者之间实行串级连接,如图1所示[6]。

图1 双闭环调速系统结构
转速调节器ASR是主调节器,其输出作为电流调节器ACR的输入,电流调节器是副调节器,其输出用来控制晶闸管触发整流装置。从闭环结构上看,电流环是内环,转速环是外环,这样就形成了转速、电流双闭环调速系统。
2 转速调节器ASR设计
转速调节器ASR采用神经模糊自适应控制器,其结构如图2所示。PID控制器和神经控制器的输出之和共同作用在被控对象上,在神经控制器没有训练之前,由PID控制器控制被控对象。随着神经控制器的学习训练,在系统的控制中取得主导地位,PID控制器的控制作用逐渐减弱。当系统再次受到扰动时,PID控制器重新发挥作用。
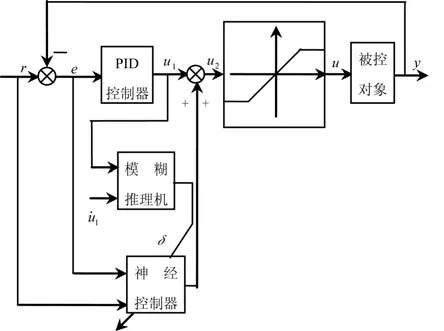
图2 转速调节器ASR的结构
3 分目标误差学习规则
一个三层的神经网络具有任意的逼近能力[7],所以本文的神经控制器采用三层前馈神经网络结构,包括输入层、隐含层和输出层。神经控制器的输入为系统输入r和误差e,输出为u2,学习误差为模糊推理机的输出δ。PID控制器的输出为u1,被控对象的输入u=u1+u2,输出为y。由于在神经控制器的学习训练初期,系统中存在较大的误差,并且在实际系统中有各种干扰的存在,如果直接采用PID控制器的输出作为神经网络的训练误差,网络的输出将会产生振荡,使系统的调节时间增加,响应速度变慢。因此,本文改变传统的误差学习规则,在每个采样周期中实现对一个分目标的跟踪,即分目标误差学习规则,使系统过渡过程平稳,最终进入稳态。规定模糊推理机的输入变量u1和u̇1的基本论域为(-u1m,u1m)和(-u̇1m,u̇1m),模糊论域为(-nu1,-nu1+1,…,0,…,nu1-1,nu1)和(-nu̇1,-nu̇1+1,…,0,…,nu̇1-1,nu̇1),则其量化因子αu1和αu̇1分别为:

式中:αu1和αu̇1为量化因子;u1m和u̇1m为模糊推理机的输入变量u1和u̇1的基本论域的最大值;nu1和nu̇1为模糊论域的最大值。
u1和u̇1经过模糊化后的模糊变量U1和U̇1分别为:

式中:U1和U̇1分别为模糊推理机的输入变量u1和u̇1经过模糊化后的模糊变量。u1、u̇1和输出变量δ的模糊子集采用负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)7个模糊状态来描述,相应的论域为{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}。输入变量和输出变量的隶属函数μ均选择为三角形函数。
分目标误差δ的学习规则通过模糊推理机推理得出,如表1所示。根据表1中所列的规则,采用重心法进行模糊判决后,得到分目标学习误差。
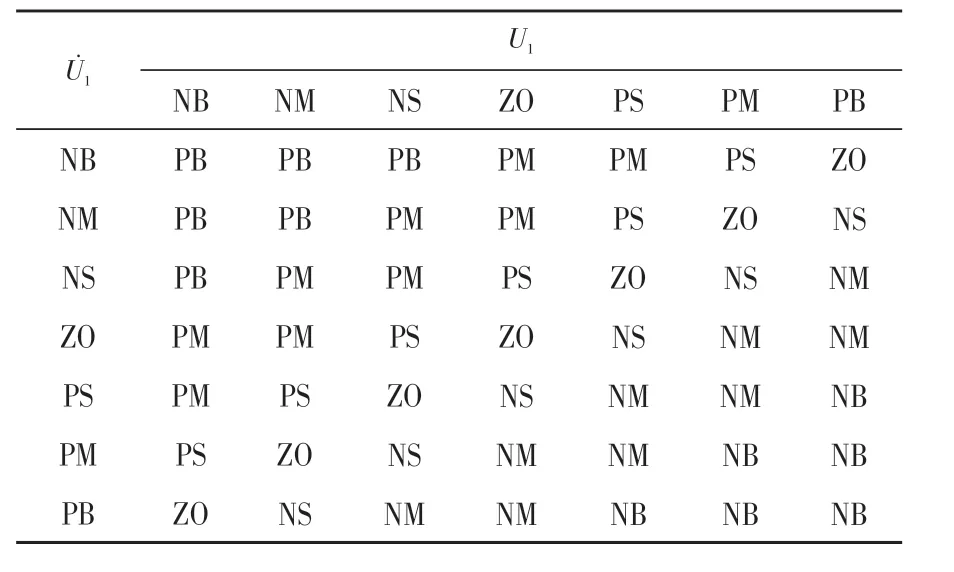
表1 分目标误差δ的模糊控制规则
ΔE为:

式中:ΔE为分目标学习误差的模糊变量;μ(δ)为输出变量δ的隶属度。
将分目标学习误差ΔE乘以一个比例因子αδ进行反模糊化,得到分目标学习误差的清晰化变量为:

这里规定神经控制器的最终学习误差为:

4 仿真研究
Matlab是MathWorks公司开发的一种功能强大的仿真软件,本文利用Simulink中的工具箱分别对转速调节器改进前和改进后的双闭环调速系统进行仿真研究。系统主回路和电动机参数如下:直流电动机Pnom=10 kW,Unom=220 V,Inom=53.5 A,nnom=1 500 r/min,电枢电阻Ra=0.31Ω。V-M系统主回路总电阻R=0.4Ω,三相桥平均失控时间Ts=0.001 67 s;触发整流装置的放大系数Ks=30。电枢回路电磁时间常数TL=0.012 8 s,系统运动部分飞轮矩相应的机电时间常数Tm=0.042 s,系统测速反馈系数α=0.006 7 V·min/r,电流反馈系数β=0.072 V/A,电流环滤波时间常数Toi=0.002 s,转速环滤波时间常数Ton=0.01 s。神经网络结构为4-10-1,学习速率为0.7,学习样本为50个,学习次数为8 000次。在1 s时加入负载扰动,在1.5 s时加入电网电压扰动,ASR采用不同的控制方式时系统的转速波形如图3所示。
由图可以看出,转速调节器采用PID控制时,转速产生很大的超调,加入负载扰动时,转速明显降落,电网电压波动对转速影响也较大。ASR采用PID+神经网络控制后,转速超调量有所下降,同时,负载扰动和电网电压波动对转速的影响均有所下降。ASR采用神经模糊自适应控制器之后,系统的超调量明显减小,由负载扰动引起的转速降落明显下降,电网电压的扰动对转速基本没有影响,系统的调节时间变短,响应速度变快。仿真结果表明,转速调节器改进后的双闭环调速系统具有更好的动态性能和抗扰性能。
5 结束语
本文所设计的直流调速系统自适应控制器,将神经模糊自适应控制器作为双闭环直流调速系统的转速调节器,能有效克服传统PID控制器的不足,减小系统的超调量,使系统的过渡过程平稳,加快系统的响应速度,改善系统的动态性能,同时提高系统的抗扰性。
