基于4G/5G的车辆监测系统*
2021-07-14黄原有张杨志
黄原有,阳 韬,张杨志
(华南理工大学广州学院,广州 510800)
0 引言
目前,我国经济发展迅速,汽车的数量也越来越多,但每年汽车事故频繁发生,车辆安全已成为人们出行主要问题。现在的车辆监测系统主要是采用STM32单排片机驱动定位[1]、酒精、温湿度、火焰[2]等传感器,采集数据后通过服务器传送到后台管理,进而进行车辆的监测。而基于4G/5G的车辆监测系统是采用4G/5G模组,进行数据的高速传输,将车辆的行驶信息快速传送到后端及进行数据的处理,并显示在后台界面,然后将后端的指令传达到底层的车辆监测系统,实现监测系统的实时性。
本文研发一种基于4G/5G的车辆监测系统,主要是运用STM32单片机驱动多种传感器,进行数据的收发,并传给Jetson Nano人工智能处理器,再通过Jetson Nano将摄像头的图像信息以及底层的信息,上传到后台管理进行车辆的监测,用以提高车辆驾驶的安全性。
1 系统整体设计
基于4G/5G的车辆监测系统是通过底层的车载监测系统进行数据的收发,经过4G/5G模组将底层的数据上传到云服务器端,最后经过数据分析处理将车辆的行驶状况信息显示在监测管理中心。底层的车载监测系统通过由STM32f407驱动多种传感器组成的底层监测系统与中上层的Jetson Nano人工智能处理器组成,进行各种数据的采集和监测,同时可以接受管理端的相关指令。管理监测中心则主要是可以接入互联网的机房,接收车载安全控制系统传输的数据,进行车辆数据的管理、实时显示、故障分析、突发状况报警等。云服务器端进行车辆数据的存储和分析,供客户端访问查看数据。系统整体设计如图1所示。

图1 系统整体设计
2 系统硬件设计
系统硬件部分的主要车载监测硬件系统如图2所示,系统的硬件部分可以分为由STM32单片机控制传感器组成的底层嵌入式系统和由Jetson Nano人工智能处理器控制的中层系统。

图2 车载监测硬件系统
2.1 底层嵌入式系统
系统的硬件设计如图3所示,底层嵌入式系统主要是通过STM32f407驱动红外传感器、车辆控制系统的CAN总线接口[3]、气体酒精传感器模块、MPU陀螺仪角度传感器、司机体征检测手环以及北斗定位模块去采集车辆以及驾驶员的信息。
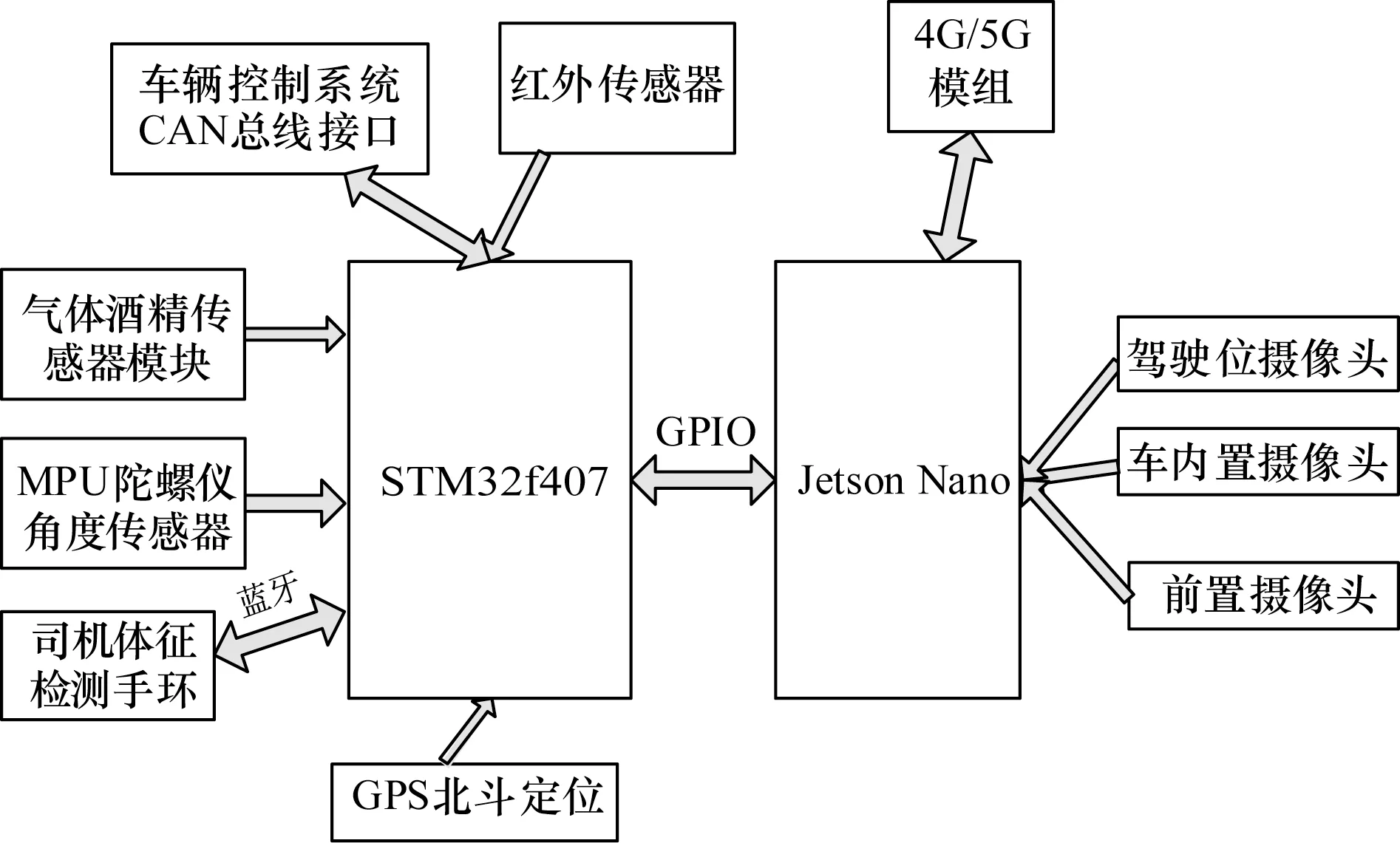
图3 系统的硬件设计
红外传感器是用于安装在车门的位置,用于记录车载人数,便于发生事故时对伤员的及时救援。而车辆的控制系统的CAN总线接口则用于读取车辆设备的状态信息。对于气体酒精传感器模块则是用于安装在汽车方向盘的位置,便于检测司机呼出的气体中的酒精含量,进而判别司机是否酒驾,如有酒驾的情况,则后台管理系统将提醒司机酒驾的危险驾驶行为。而MPU陀螺仪角度传感器则用于检测车辆的姿态信息,判断车辆是否发生碰撞及汽车当前车速信息,及时上传给后台。司机体征检测手环则用于采集司机的心率信息,并通过蓝牙将信息传送到STM32f407单片机,使后台管理中心能及时得知司机心率等身体状况信息。北斗定位模块基于北斗卫星导航系统对汽车进行定位,将车辆的位置信息及时反馈到后台。
2.2 Jetson Nano人工智能处理器
当底层的监测系统采集的数据通过串口将车辆的信息传送到Jetson Nano人工智能处理器后,Jetson Nano会将车辆信息以及摄像头的信息,通过4G/5G模组一起将信息上传到云服务器端。
驾驶位摄像头主要用于人脸识别[4],识别驾驶司机是否为车主,如若不是,则发出警报。司机的人脸识别主要基于卷积神经网络[5],将司机的图像预先录入到系统中,进行人脸检测和灰度处理形成训练集,再进行人脸识别建模,经过多轮的训练使模型的精确度达到90%
以上则将模型保存。等下次司机驾驶时,则将采集司机图像,经过人脸检测和灰度处理后,作为模型的测试集输入到模型,进行人脸识别,这时会设置一个阈值,当识别人脸的概率大于等于这个阈值则输出正确的人名,小于该阈值则输出为陌生人。
车内置摄像头主要用于监控车内的驾驶环境,如在大巴上有不法分子干扰司机驾驶,则后台人员监测到这一画面时,可以及时发出警报,并且可以记录这段监控录像,将犯罪分子绳之于法。
前置摄像头主要用于监控车辆行驶时前方的行驶路况,便于发生突发情况时报警。
党的十九大报告指出:推进绿色发展。加快建立绿色生产和消费的法律制度和政策导向,建立健全绿色低碳循环发展的经济体系。构建市场导向的绿色技术创新体系。构建政府为主导、企业为主体、社会组织和公众共同参与的环境治理体系。
4G/5G模组主要是对Jetson Nano中的数据进行转发,因其传输速度非常快,所以将监测系统的延时降到了最低,能够实时监测车辆的行驶状况。
3 系统的软件设计
3.1 软件网络结构
如图4所示,系统的软件部分主要是上层部分,即Jetson Nano人工处理器的车载数据,将会通过4G/5G模组上传到云服务器,云服务器将对这些数据进行分析和处理,并记录车载和已处理的信息。后台管理设备可以通过路由器访问云服务器上已处理的数据[6],并显示在后端界面上。也可以开发一个微信小程序,移动设备可以进入该小程序,通过路由器访问云服务器上的数据,呈现在手机界面上。
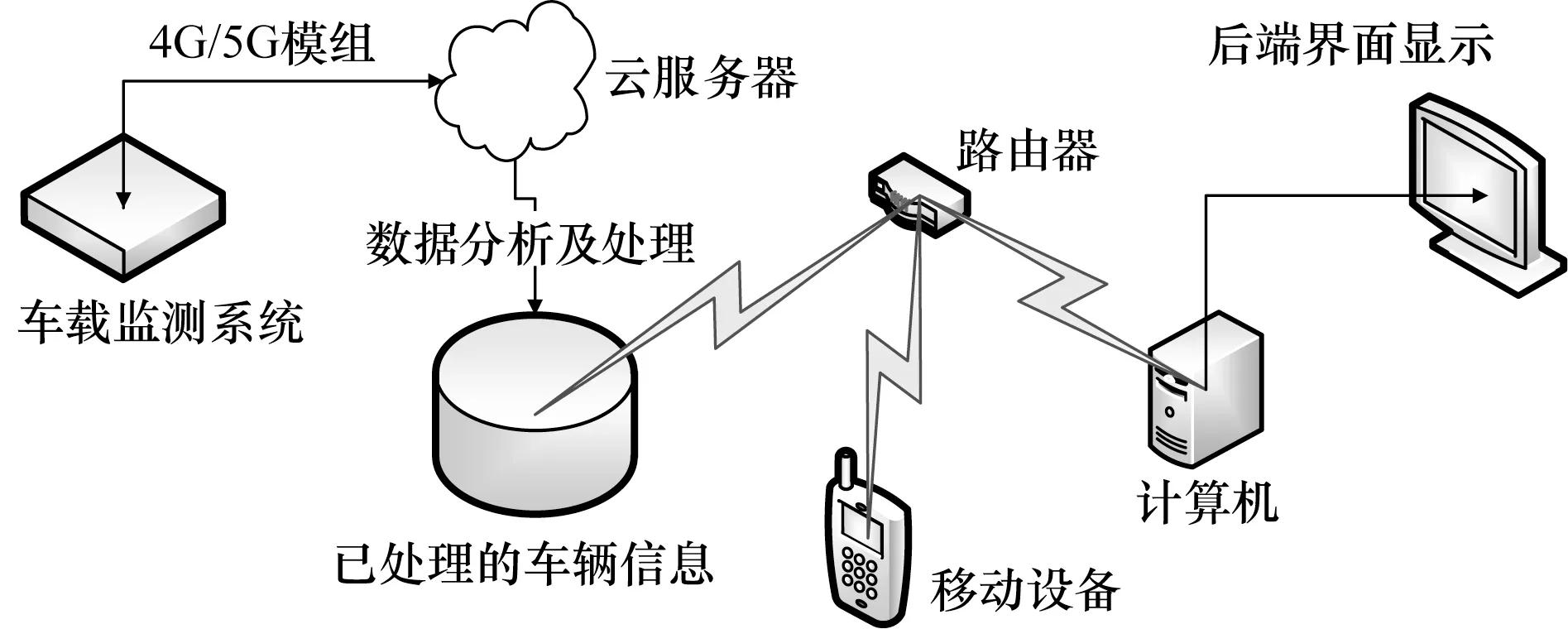
图4 软件层结构
3.2 数据分析及处理
基于4G/5G车辆监测系统是基于4G/5G的快速传输能力,对车载进行实时的监督,而对于传输过来的底层车辆信息,则需要对于做进一步的数据处理,便于后台管理人员监督,并能将数据简明的呈现给用户。因此,对于本系统的数据,则采用了模糊综合评价法[7]对数据进行评价:
(1)建立了一个因素集U={u1,u2,u3,u4,u5},u1表示司机驾驶的时长,u2表示司机的心率值,u3表示汽车行驶车速,u4表示司机呼出气体的酒精浓度,u5表示汽车的状态信息。
(2)建立一个综合评价的评价集V={v1,v2,v3,v4},v1表示当前车辆驾驶状态舒适,v2表示当前驾驶状态良好,v3表示当前车辆驾驶状态较差,v4表示当前车辆驾驶不适合驾驶应立即停止驾驶。
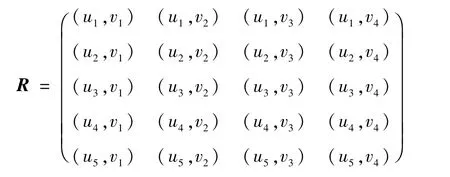
(3)对每个因素进行单因素评价进而获得评价矩阵R[8],在对每个单因素进行评价之前会根据车载监测系统上传的每个因素值进行等级划分。例如对于驾驶时长在0~2 h为舒适驾驶,2~4 h为驾驶状态良好,4~5 h为驾驶状态较差,6 h以上则不适合驾驶,需停止驾驶。假设司机驾驶的时长最多是8 h,则当驾驶时长在0~2 h,(u1,vj)有序对则可能为[0.75,0.125,0.075,0.05]。因为软件系统会根据驾驶时长t,用1-t/8作为评价为舒适驾驶的值即0.75。再用t/6分别乘以0.7、0.2、0.1得到评价为良好、较差、不适合的值,即(u1,vj)有序对中的0.125、0.075、0.05。
软件会根据类似的评价体系,对底层传输过来的每个因素进行等级划分,再对每个因素赋予评价值,最后得到一个评价矩阵如下:
(4)确定每个因素的权重集合,即A={a1,a2,a3,a4,a5},ai越大表示该因素占的比重越大,在本系统中采用的权值集合是{0.15,0.35,0.3,0.2}。
(5)建立一个综合评价模型,即定义一个模糊向量B,B=A×R={b1,b2,b3,b4},在b1~b4之间取出最大值,该最大值对应的评价就是当前的车辆驾驶状态。如:b2最大,则当前车辆驾驶状况良好,可继续驾驶。
3.3 数据处理结果展示
车载数据在后台将会显示车载摄像头所监控画面、司机人脸检测的结果和司机呼出气体的酒精浓度,以及车速和司机心率随时间的变化,如图5所示,车辆驾驶状态的评价如图6所示。
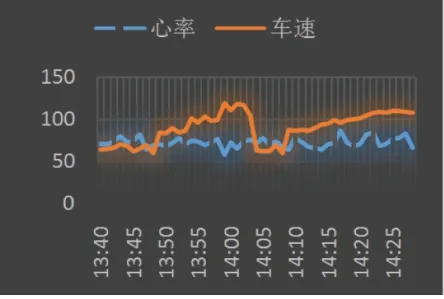
图5 车速和司机心率变化

图6 车辆驾驶状态的评价
4 结束语
本文研究基于4G/5G的快速传输能力,对车辆驾驶状态信息传输,并对车辆数据进行数据处理与分析,实时显示在后台管理中心以及用户的移动设备上;可以实现车辆的监测,避免突发状况的发生,并可在发生事故后,第一时间报警请求援助来抢救生命。可将其应用于各汽车制造公司,为该公司的汽车提供安全保障。也可应用于出租车公司、公交车公司和长途客车公司。给公司的车辆安装一套安全系统,能够实时监测车辆的运行状态,了解司机的驾驶情况,并针对性地处理,能够减少事故发生,减少人员和财产的损失。
