基于RFID车车通信的防碰撞预警系统设计
2021-07-14顾昊伦王军年邱鹏铖魏梦岩
顾昊伦,王军年,邱鹏铖,魏梦岩,严 云
(吉林大学 汽车工程学院,长春 130025)
近年来,交通事故频发,汽车碰撞成为最主要的交通事故形式,严重威胁着人们的生命和财产安全[1]。车辆防碰撞预警系统等主动安全技术具有重要的研究意义。美国加州大学伯克利分校研究了防撞控制;通用汽车公司研发了“视觉控制雷达”防碰撞系统[2-3];日本Eaton VORAD公司研制了汽车防撞雷达;丰田汽车公司将视觉系统和毫米波雷达结合,通过视觉图像处理对车距进行动态监测[4];韩国Moon等[5]研究了走-停系统,并将主动防撞功能整合到自适应巡航系统;北京泰远科技有限公司研制的“泰远”牌汽车防撞器针对障碍物运动和静止有两种工作模式;河南超越汽车有限公司的防撞产品将红外探头安装在汽车前端,以检测前方车辆[6-7];吉林大学王军年等[8]利用超声波雷达检测车体后方物体运动并对车门进行锁死控制,采用激光三角测距原理检测车身两侧障碍物,限制车门开启角度;南京工程学院滕飞等[9]设计的汽车侧门开启防碰撞预警系统通过超声波检测模块检测周围环境,所得环境信号经处理后判断是否预警;德赛西威公司[10]发明的预警系统通过预设身份识别号(ID)库,使标签ID与车辆周边的事物信息一一对应。停车后,系统采集识别到的信息与ID库中的标签ID匹配,并根据标签的种类发出相应预警。
综上所述,现有智能驾驶辅助系统的防碰撞预警大多是基于车载视觉和雷达感知技术的单车智能防碰撞预警,市面上的汽车防碰撞系统多采用红外线、超声波、雷达等技术手段等进行检测和预警[11]。车载视觉测距实时性较低且测量精度受限于摄像头分辨率和视觉信号处理方法;红外线、超声波在恶劣天气时穿透能力较低且灰尘、烟雾笼罩时传感器性能较差;雷达的目标识别能力较差且成本较高。
目前无线射频识别(RFID)技术已基本成熟,广泛应用于各个领域[12]。随着高速公路过桥费电子不停车收费系统(ETC)的普及,车辆普遍装有RFID模块。该无线通信技术具有成本低、普及量大、准确度较高等优点。为此,本文提出基于RFID技术实现车-车通信,且专门针对停车路段容易发生的碰撞事故提供一套可行的预警系统设计方法。
1 总体方案设计
为简化说明,道路行驶车辆用A车表示,停车路段停放车辆用B车表示。系统工作原理如图1所示。本系统提出的防碰撞预警系统分别布置于行驶车辆A车和停放车辆B车。安装在A车的装置由电源、信息采集模块(包括前置摄像头、毫米波雷达、车速传感器)、预警模块、RFID模块、控制器、汽车主动安全系统(包括主动前轮转向系统(AFS)和自动紧急制动系统(AEB))组成;安装在B车的装置由电源、信息采集模块(包括方向盘转角传感器、车速传感器、车门开启角度传感器)、控制器和RFID模块组成。

图1 系统工作原理
系统的工作原理为:当A车行驶于停车路段的慢速车道上时,会发出带有地址的RFID触发信号,此信号发出后以局域网的形式传播,即只要处在一定范围内的停放车辆皆可受到触发。此时如果停车路段上有停放车辆B车即将起步或存在车门开启这一动作时,则B车信息采集模块中的各类传感器会监测,并将数据信息传至控制器,到达电子标签中,再经A车的无线射频信号激发使B车向A车发出带有地址且携带本车状态信息的无线射频信号,A车RFID模块接收并将其传至控制器中进行数据处理和安全判定,根据不同的判定结果完成后续的预警和驾驶辅助操作。
2 各硬件模块设计
2.1 子系统硬件设计
本系统的控制器中采用16位Freescale9S12型单片机,具有速度快、功耗低、性能高的特点,并具有较强的数值运算和逻辑运算能力,可满足系统所需处理功能。A车子系统硬件组成框图如图2 所示。A车控制器与A车的车速传感器、前置摄像头、毫米波雷达、语音预警模块、RFID模块、AEB、AFS相连,通过处理自身传感器检测到的本车车速、距离和视觉信号等状态信息以及接收到的包含B车状态信息的RFID信号,进行判定处理,根据判定结果传递相应数字信号控制对应模块或系统完成后续预警或驾驶辅助等操作。B车子系统硬件组成框图如图3所示。B车控制器与B车的车速传感器、方向盘转角传感器、车门开启角度传感器、RFID模块相连。在RFID模块接收A车带有地址的RFID触发信号后,B车信息采集模块中的各类传感器会监测车速、转角数据信息和车门开启状况,将数据信息传至控制器,并存入电子标签中,经RFID模块发射携带本车状态信息的RFID信号。

图2 A车子系统硬件组成框图

图3 B车子系统硬件组成框图
2.2 RFID模块设计
RFID模块电气组成框图如图4所示,RFID模块主要由电子标签、读写器和天线组成。由于该系统的工作环境为停车路段和慢速车道,信息的传递量较大(包含车身部分设计参数、车速和车轮转角等运动状态信息),依据《机动车电子标识读写设备通用规范》(GB/T 35786—2017)[13],拟采用BRT-02型电子标签,该标签优点为通信距离远、读写灵敏度高、物理特性良好,芯片内存和读写灵敏度符合国家标准,能够存储较大数量的数据信息,适用于此工作环境;读写器则采用CNIST CN-9800超高频(UHF)远距离读写器,其读写频率、读写灵敏度、存储容量符合国家标准,同时,其静态识读距离可达20 m,明显优于国家标准所规定的最低静态识读距离12 m。当电子标签进入读写器的信号范围并接收无线射频信号后,凭借感应电流所获得的能量发送存储的数据信息,读写器读取信息解码后,送至中央处理模块进行数据处理。

图4 RFID模块电气组成框图
2.3 预警模块设计及预警时序确定
预警模块主要包括警示灯和扬声器。在控制器处理好数据后,与已知的安全范围进行比较,若超出安全范围则触发扬声器,发出语音预警或闪烁警示灯。语音模块可采用N588D作为语音芯片,N588D系列语音单片机具有功能多、音质好、应用范围广、性能稳定等特点,弥补了以往各类语音芯片应用领域狭小的缺陷。预警时序包括预警信号收发、触发预警和预警响应3个过程。在预警信号收发过程中,A车首先借助自身配备的前置摄像头捕捉路况画面,然后将画面信息传送至自身控制器进行处理,若处理结果显示检测到前方停车路段存在停放车辆B车,且此时A车正行驶于慢速车道,则触发自身的RFID模块,发出带有地址的RFID触发信号,B车电子标签经此信号激发后随即发出携带自身数据信息且同样带有地址的RFID反馈信号,即预警信号,而后被A车接收。接下来为触发预警过程,A车控制器将所获B车的运动状态数据信息和自身状态数据信息进行数据处理,若数据处理结果符合判据,则会触发预警。预警响应为仪表盘中碰撞预警灯闪烁提醒驾驶员已行至路边有停车路段,并且控制语音扬声器播放语音,提示驾驶员留意路边停放车辆,小心驾驶。
3 系统控制软件设计
3.1 系统软件功能
系统软件的功能需求按工作场景分为停车路段停放车辆起步和车门开启两种情况。
停车路段停放车辆起步防碰撞预警系统工作场景如图5所示。该工作场景为停放车辆突然起步并线入道的突发场景情况,A车行驶于慢车道,B车停在停车路段。A车的毫米波雷达测得其前保险杠距离B车后保险杠的纵向距离为SL,横向距离为SS;A车的车速VA由A车的车速传感器测得;B车的瞬时速度VB由B车的车速传感器测得;B车车轮的转角δB经方向盘转角传感器获得后再通过式(1)计算可得;A车的车宽为WA,B车的车宽为WB,轴距为LB。
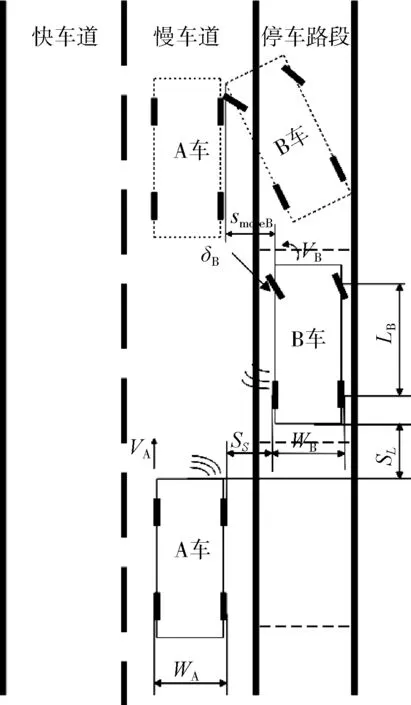
图5 停车路段停放车辆起步防碰撞预警系统工作场景
(1)
式中,θB为B车的方向盘转角,°;iS是方向盘转角与车轮转角的传动比。
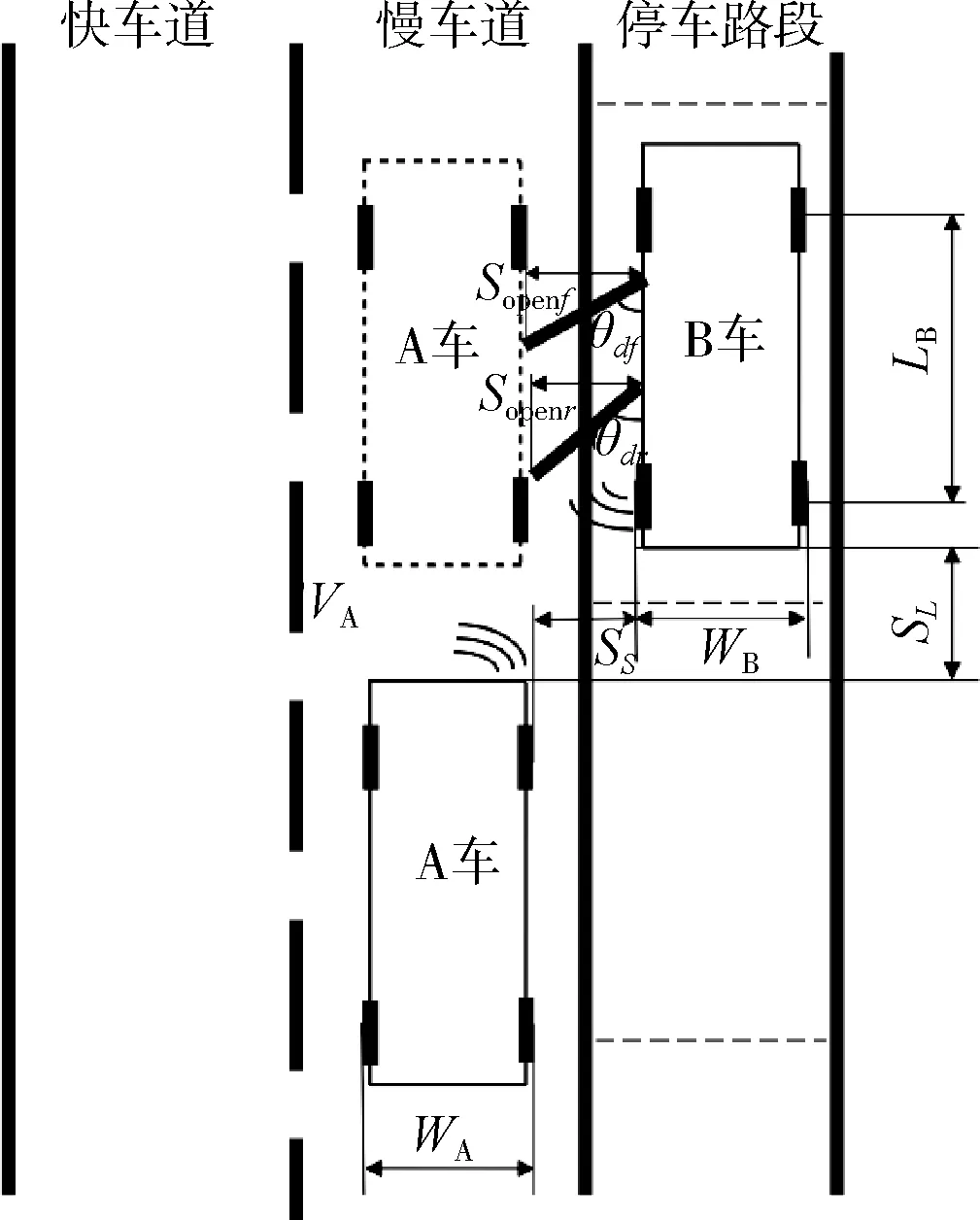
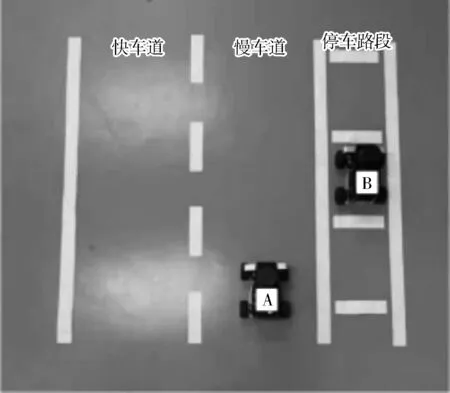
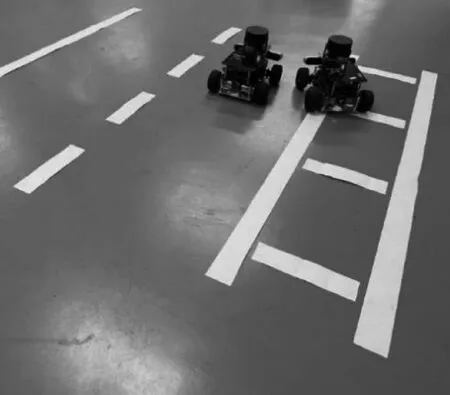
运用上述已知数据建立预警机制模型。在安全情况下,应满足在两车运动到轨迹相互重合的临界位置时,B车横向位移SmoveB小于两车的横向距离SS,即SmoveB (2) 在本场景中,判据应为:SmoveB 停车路段停放车辆车门开启防碰撞预警系统工作场景如图6所示。该工作场景为停放车辆突然有车门开启动作,此时,A车行驶于慢车道,停车路段B车正在开启车门。 图6 停车路段停放车辆车门开启防碰撞预警系统工作场景 A车的毫米波雷达测得其与B车的横向距离SS;B车的前、后门开启角度传感器测得前门开启角度为θdf,后门开启角度为θdr。 运用上述已知数据建立预警机制模型。在安全情况下,应满足两车的横向距离大于B车车门开启后占据横向的最大长度Sopen,其中Sopen可通过将WA、WB、LB、θdf、θdr和SL0代入式(3)得出前门和后门的Sopenf和Sopenr,此时判据应为:SS>max{Sopenf,Sopenr}。 (3) 式中,kd为车门宽度计算系数,由于汽车的车门一般与汽车轴距存在线性关系,且前后车门存在差异,kd取2.5~3.0,本场景取2.5;θd为车门开启角度,°,分为前门开启角度θdf和后门开启角度θdr,车门开启角度一般为45°~90°,代入式(3)可分别得到Sopenf和Sopenr。 若处理结果符合判据,则触发后续语音预警过程;反之,A车底盘域控制器控制AEB和AFS,根据感知的环境状况,协调决策完成自动紧急刹车或自动紧急避障变线的车辆运动,以避让B车起步上道或车门开启导致的碰撞危险。 防碰撞控制软件流程如图7所示。防碰撞控制软件操作步骤: 图7 防碰撞控制软件流程 (1) A车通过自身配备的硬件设施读取得到B车发送的状态信息。 (2) A车获得自身的相关状态信息以及与B车的实时距离信息。 (3) A车通过确定获得的信息里有无B车前轮转角信息从而判断属于哪种工作情况,若检测到有前轮转角信息则说明是停放车辆起步预警工况,若无,则说明是停放车辆车门开启预警工况。 (4) 根据不同的工况运用不同的安全判据。 (5) 根据安全判定结果进行后续的语音预警或驾驶辅助操作。 采用模型车,搭建相关试验场景完成验证。由于本实验未采用实车,模型车包括车速传感器、毫米波雷达、前置摄像头、预警模块、RFID模块、车轮转角传感器和控制器,未包括AEB、AFS和车门开启角度传感器以外的其他硬件设备。其中,预警模块包括警示灯和蜂鸣器。车速传感器用于采集两车的车速信息;毫米波雷达用于采集模型车A与模型车B的距离信息;前置摄像头用于捕捉路面信息;预警模块中的警示灯和扬声器用于显示预警效果;RFID模块用于两辆车之间的通信;车轮转角传感器用于获得车轮转角信息;控制器用于进行数据处理。通过上述硬件设备能够满足本实验的验证要求。 试验场景如图8所示。初始状态下,模型车A和模型车B分别静止在慢车道和停车路段上。预警场景如图9所示。试验开始后,模拟停放车辆起步上道,两车在运动过程中通过自身的硬件设备获得实时运动状态信息,并通过RFID模块完成信息传递,其中模型车A的车速快于模型车B。经控制器处理数据显示本次实验场景下并不满足安全判据:SmoveB 图8 试验场景 图9 预警场景 为解决路边侧方位停放车辆起步或车门开启与道路行驶车辆发生碰撞的问题,采用较为成熟且成本合理的RFID技术进行车间信息传递,设计了基于RFID车-车通信的防碰撞预警系统软硬件方案。通过搭建模型及其场景,验证了该系统能够有效避免狭窄城市道路路边停放车辆突然驶入车道或开启车门造成的事故,相比现有技术,在一定程度上解决了城市道路停放车辆的通行效率和安全问题,且系统结构简单、成本较低,具有实用价值。后续将进行更深入的实车试验,更加全面系统地验证该系统的预警效果。
3.2 控制软件流程

4 试验验证
5 结论
