城市道路机动车行驶工况本地化特性分析
2021-07-14杨阳,张涛
杨 阳,张 涛
(太原科技大学 交通与物流学院,山西 太原 030024)
行驶工况是车辆进行底盘测功机试验时用来遵循的驾驶操作,通常用速度-时间曲线表示.行驶工况作为车辆排放和燃料消耗评估的重要指标,尤其针对新型节能环保类车辆,例如混合动力汽车(HEV)和电动汽车[1].行驶工况也用于测试车辆排放因子,并根据节能减排排放标准对新的发动机技术进行评估.在应用范围方面,行驶工况分标准行驶工况和非标准行驶工况2种.标准行驶工况(也称为法定行驶工况),如美国的联邦测试工况(FTP-75),欧洲的新欧洲行驶工况NEDC(new European driving cycle)主要作为政府及相关管理部门强制使用的发动机排放认证标准工况.相反,非标准行驶工况(也称为非法定行驶工况),如不同城市开发的本地行驶工况主要用于车辆使用过程中的排放评估和污染控制,以及研究人员对车辆的排放生命周期分析[2].
目前,世界范围内轻型车新车排放认证工况主要分为3类:美国的联邦测试工况(FTP-75)、欧洲的新欧洲行驶工况(NEDC)和日本的行驶工况(JC08)[3].NEDC几十年来一直被视为中国轻型车新车排放认证标准测试工况,但是由于其怠速和匀速模式比例较高、加减速平稳、测试时间短,并且包含大量重复工况,因此被质疑不能代表实际的行驶状态.自2017年以来,NEDC正逐渐被WLTP(全球轻型车测试工况)所取代,目前中国也正在进行全国范围内国Ⅺ标准的普及.虽然WLTP的建立是基于道路实际数据的采集并且能够比NEDC更好地反映道路行驶状态,但是仍然不足以代表不同地区或城市的实际道路行驶条件.不同城市的社会、经济和地理特征的差异决定了城市道路机动车行驶工况的本地化特性.对于行驶工况的研究,特别是当前标准行驶工况已经不能很好地代表道路实际行驶条件时,仅局限于某些标准行驶工况是不合适的.因此,针对城市道路机动车行驶工况的本地化特性研究引起了越来越多研究者的关注.
笔者分析近年来构建的典型本地行驶工况,总结本地行驶工况的构建方法,并以南京市为例,利用历年数据构建不同年份南京本地行驶工况并进行对比分析,同时将南京本地行驶工况与国内其他城市进行参数比较,从时间和空间维度对城市道路机动车行驶工况的本地化特性进行分析.
1 国内外城市本地行驶工况
国内外学者在开发某些地区或城市的本地行驶工况方面进行了大量有价值的研究,表1列出了近年来新开发的典型城市本地行驶工况.

表1 近年来新开发的典型城市本地行驶工况
表1中,文献[5]采用追车和车载试验结合的方法,文献[6]采用仿真法,文献[14]采用追车法,其他文献采用车载试验的方法采集数据.每种新构建的本地行驶工况因其不同的构建方法、研究区域和车辆类型而具有独特性.即使对于同一城市,针对不同车辆类型也会开发出不同的行驶工况.例如,K.S.NESAMANI等[16]开发了印度钦奈公交车的行驶工况,而N.H.ARUN等[11]则开发了该城市的乘用车和摩托车的行驶工况.文献[2,5,10]将所开发的行驶工况与标准行驶工况进行了比较,文献[4,6-8,11-13,15]则将所开发的行驶工况与其他城市地区的本地行驶工况进行了比较.行驶工况特征参数之间的显著差异强调了城市道路机动车行驶工况本地化特性研究的必要性.然而,很少有文献能够系统地从时间和空间维度对本地行驶工况进行对比分析.本研究选择南京作为研究对象,分别利用2009年和2017年的道路采集数据进行乘用车行驶工况的构建,相同的数据采集方法和行驶工况构建方法使不同时期的本地行驶工况对比更加合理.
2 本地行驶工况构建方法
本地行驶工况的建立主要包括路线选择、数据采集、数据处理和工况构建.
2.1 路线选择及数据采集
路线选择是行驶工况构建过程中虽主观但又比较关键的步骤,根据对当地交通状况的了解,考虑道路等级和交通流量特征等因素[6,9].选择代表研究区域的典型行驶条件的路线,路线应包括城市所有道路类型(快速道路、主干路、次干路和支路).
数据采集法通常分为追车法和车载试验法2种.文献[13]将GPS归类为第3种方法,而文献[10-11]则将GPS归类为车载试验法.文献[5]将追车法和车载试验组合作为第3种方法.目前还没有统一和明确的数据采集方法分类标准.为了更好地理解分类标准,笔者重新对这些方法进行定义归类.
第1种方法,即追车法,试验车辆随机选择目标车辆追踪,如果目标车辆驶出研究区域,则改换另一辆车追踪.由于南京市区道路交通流中经常会出现车辆插队或变换车道现象,特别是在交通拥堵的情况下,目标车辆难以顺利追随.追车法的测试路线具有一定的随机性,需要足够大的样本来覆盖所有类型的道路.
第2种方法命名为车载试验法是不合适的,因为所有数据采集方法都需要装有设备的车辆.根据测试车辆在数据采集过程中的特点,将其命名为自主行驶法.因为在试验过程中测试车辆处于个人出行目的的正常使用中,且没有空间和时间限制,因此该方法可以获取道路上的实际行驶数据,但是需要大量样本来确保数据的代表性.
第3种方法,即平均交通流法,具有操作简便、主动性强的特点.测试路线和时间需要提前规划,测试车辆由指定的对路况熟悉且经验丰富的司机驾驶.在测试过程中,装有设备的车辆应保持与道路交通流一致.
2.2 数据处理
构建本地行驶工况主要有2种方法:① 由随机选择的短行程(见图1)形成的行驶工况;② 基于模型的方法,通过对短行程进行分析和处理,使其工况特征参数接近现实数据[17].目前第2种方法应用比较多,大多数城市通过主成分分析法和聚类分析法相结合,提取短行程组合形成与道路行驶工况相接近的城市本地行驶工况.

图1 短行程和运动段的定义
通过道路试验获得速度-时间数据,经过数据预处理后确定每个采样点的行驶模式,主要分为加速(当采样点的加速度大于0.14 m·s-2时,计为加速点)、减速(当采样点的加速度小于-0.14 m·s-2时,计为减速点)、匀速(当采样点的加速度绝对值小于或等于0.14 m·s-2,且速度大于或等于1 km·h-1时,计为匀速点)和怠速(当采样点的加速度绝对值小于0.14 m·s-2,且速度小于1 km·h-1时,计为怠速点)4种状态[3].
2.3 工况构建
通常用特征参数来描述短行程的特征并作为评估对比的标准.特征参数的个数并没有明确的限制,各个短行程的特征参数通过SPSS等软件计算,选取与试验获得的实际道路行驶数据的平均误差最小的短行程组合作为本地行驶工况.本地行驶工况的构建过程如图2所示.

图2 构建本地行驶工况流程图
3 本地行驶工况的时间特性
根据本地行驶工况构建步骤,分别构建2009年和2017年南京本地行驶工况.试验车辆选用轻型汽油车,采用平均交通流法,测试路线如图3所示.

图3 2009年和2017年测试路线
测试时间包含工作日和周末的高峰时段和非高峰时段,每条路段往返2次以上.从获取的有效数据中提取短行程,18个特征参数用来描述短行程的行驶特征,参数描述如下:vmax为最大速度,km·h-1,表示短行程中采样点速度最大值;vm为平均速度,km·h-1,表示短行程全部采样点速度之和除以全部采样点个数;vmr为平均行驶速度,km·h-1,表示短行程全部采样点速度之和除以非怠速采样点个数;a1max为最大加速度,m·s-2,表示短行程中采样点加速度最大值;a2min为减速时最小加速度,m·s-2,表示短行程中采样点加速度最小值;a1为平均加速度,m·s-2,表示整个短行程的平均加速度;a2为减速时的平均加速度,m·s-2,表示整个短行程减速时的平均加速度;L为行驶距离,km,表示整个短行程的运行里程;t为短行程行驶时间,s;Pa为加速比例,%,表示加速采样点个数占全部采样点个数的比例;Pd为减速比例,%,表示减速采样点个数占全部采样点个数的比例;Pc为匀速比例,%,表示匀速采样点个数占全部采样点个数的比例;Pi为怠速比例,%,表示怠速采样点个数占全部采样点个数的比例;P0为速度大于0 km·h-1,小于等于20 km·h-1的采样点个数占短行程全部采样点个数的比例,%;P20为速度大于20 km·h-1,小于等于40 km·h-1的采样点个数占短行程全部采样点个数的比例,%;P40为速度大于40 km·h-1,小于等于60 km·h-1的采样点个数占短行程全部采样点个数的比例,%;P60为速度大于60 km·h-1,小于等于80 km·h-1的采样点个数占短行程全部采样点个数的比例,%;P80为速度大于80 km·h-1的采样点个数占短行程全部采样点个数的比例,%.
通过主成分分析和聚类分析法将原始数据中的短行程分为3类,具体数据处理方法参考文献[17].最终构建2009年和2017年南京本地乘用车行驶工况原始数据、组合行驶工况的特征参数平均值及相对误差如表2所示.其中:A1、A2、A3分别为2009年车辆在南京低、中、高速区行驶的工况;B1、B2、B3分别为2017年车辆在南京低、中、高速区行驶的工况.从表2可以看出,2009年和2017年组合的行驶工况与原始数据特征参数的平均相对误差均小于11.00%,表明该工况构建方法的可行性.

表2 2009年和2017年南京本地乘用车行驶工况原始数据、组合行驶工况的特征参数平均值及相对误差
表3分别列出了低速区、中速区和高速区南京2009年和2017年本地行驶工况的几个典型特征参数平均值.从表3可以看出,车辆的平均速度vm在低速区最低,怠速比例Pi最大值出现在低速区,说明低速区的车速经常会被中断.随着车辆保有量的增多,与2009年相比,2017年低速区vm从14.01 km·h-1降至12.88 km·h-1,中速区vm从30.68 km·h-1降至26.88 km·h-1.此外,低速区a1和a2分别在8年内从2.73 m·s-2减少到1.47 m·s-2、从2.83 m·s-2减少到1.56 m·s-2,这很大部分是因为经常占用支路和次干道的违法占道现象得到了有效的整改.虽然2017年行驶工况中速区vm相对于2009年略有下降,但在2009年至2017年间,a1和a2均减少了约50%,这主要是得益于南京市主干道路网交通信号的优化.与低速和中速不同,高速的vm得到了显着改善,从2009年的48.36 km·h-1提高到2017年的57.40 km·h-1.高速区的城市快速道路网于2009年初步形成,很多地方建设不完善仍需要进一步加强和改进,因此无法顺利疏散来自市中心的大量交通流,从而城市快速道路有时会发生交通拥堵.而在8年后的2017年,南京市城市快速道路网已经全部建成和完善,可以迅速有效地疏散市内道路交通流,这也是2017年高速区道路状况有所改善的原因(2017年Pc达到53.78%).

表3 南京本地行驶工况典型特征参数平均值
根据2009—2017年的南京统计年鉴数据,南京市乘用车拥有量已经连续8年以超过10%的速度持续增长,然而道路驾驶条件并没有以同样的速度恶化.根据2015年中国主要城市交通分析报告显示,南京在1年内交通拥堵指数排名下降了20位,位居第26位,优于济南、哈尔滨、杭州等省会城市.南京市道路行驶条件的改善很大程度上是由于城市对便捷、快速、环保的公共交通和智能交通系统开发的大力投资已初见成效.
总之,2009年和2017年南京市本地行驶工况之间的特征参数存在显著差异,将会导致利用不同年份行驶工况得到的车辆尾气排放因子的差异也较大.因此,在与其他城市比较行驶工况的特征参数时,有必要考虑行驶工况所建立的年份.对于城市而言,为了获得比较准确的车辆排放预测,需要每隔几年对用于在底盘测功机上模拟的本地行驶工况进行更新.
4 本地行驶工况的空间特性
为了深入对南京市本地行驶工况特性的了解,选择了包括北京、上海、天津和宁波4个城市行驶工况的典型特征参数进行比较[18].表4列出了国内不同城市乘用车行驶工况的典型特征参数平均值.
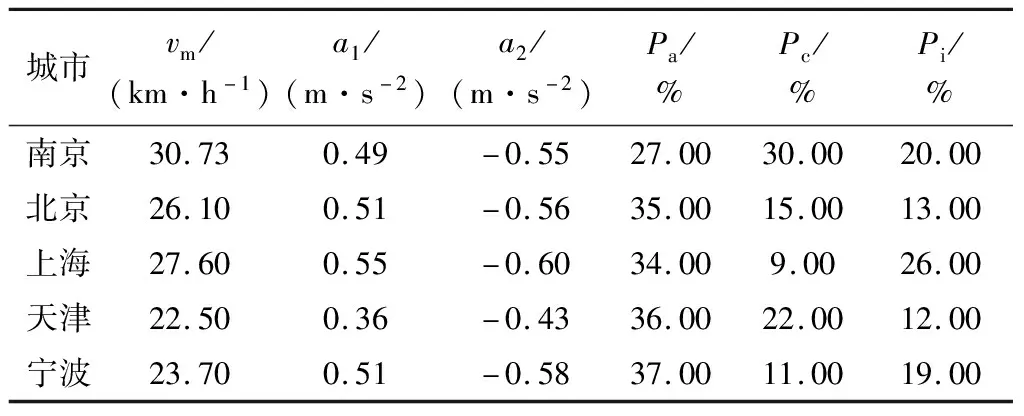
表4 不同城市行驶工况典型特征参数平均值
通过对比可以看出,南京市乘用车行驶工况的特征参数与其他城市的特征参数有很大区别:南京市的vm为30.73 km·h-1,平均速度相对高于其他城市.a1和a2可以反映一个地区驾驶员行为的激进程度,从数据上看南京市的a1和a2比天津市以外的其他城市都低,尤其低于北京和上海,可以得出南京市道路车辆的驾驶行为较为温和.此外,南京市行驶工况具有较低的Pa,加速模式的时间比例最低,这表明南京市道路上的司机不会频繁改变车速,可见道路行驶状况较好.根据分析结果可知,Pc的最大值(30.00%)出现在南京市,说明道路车辆匀速行驶的比例较大,反映南京较好的道路路况.同时南京市Pi(20.00%)也较大,道路车辆怠速行驶的比例较大,这表明在南京市道路上车辆在交叉口等待的时间相对较长,一定程度增大了道路车辆污染物排放[18].总之,通过观察南京市和国内其他城市在本地乘用车行驶工况的特征参数对比可以发现明显的差异,即使同一国家的不同城市,道路上的行驶特征也不相同,不同的行驶工况会导致测试出不同的排放因子.因此,对于不同的城市,使用相同的道路行驶工况来预测排放因子可能会得到与实际排放误差较大的结果.
5 结 论
1)构建不同年份同一城市的本地行驶工况并进行对比,典型特征参数的差异表明:在进行城市道路机动车行驶工况本地化特性研究时,考虑数据收集年份的重要性,为了获得与道路实际排放相符的排放因子,城市本地行驶工况有必要根据道路交通发展状况进行定期更新.
2)国内不同城市道路本地行驶工况的特征参数差异也表明了城市道路机动车行驶工况本地化特性研究的必要性,不同城市因地理特征、交通规划和设施等差异都会导致道路车辆运行状态的不同,因此会导致测得不同的排放因子.
3)城市道路机动车行驶工况本地化特性研究有利于获取更精确的道路实际车辆排放因子,有利于进行车辆生命周期排放特性研究,为道路机动车排放量化提供理论基础.在构建本地行驶工况时利用保有量比例最多的汽油乘用车采集数据,但在道路路网中不同类型的车辆行驶工况差异较大,因此需要在后期研究中考虑不同车型,例如新能源汽车和新概念汽车等,通过研究具有城市特性的道路行驶工况进行更精确的道路车辆污染物排放量化.