一种基于体感检测的温室智能分拣移动平台的设计
2021-07-14曾雯莲肖茂华
曾雯莲 许 鹏 肖茂华
(1.南京农业大学 工学院,江苏 南京 210031;2.东台市金津果业有限公司,江苏 盐城 224200)
随着我国人口红利的消失,人工成本的不断上涨,传统的人工分拣方式越来越不适用,且人工分拣受操作人员主观因素的影响较大,检测精度和检测质量都无法保证稳定,难以实现标准化的管控。市场上绝大多数水果分拣工作都在拥有流水化自动化的大型水果分选机的工厂内完成,但对于温室来说,大棚种植区域小,空间有限,无法实现大规模的机器采摘与大型农产品分级设备的安装,水果产后处理能力不足。
1 温室水果分拣问题分析
国内目前大多数地区主要采用人工分拣的方式对水果进行分级,但随着农业机械现代化的发展以及人们对农产品质量要求的提高,这种分拣方式的劣势越发凸显。随着国家的经济、科技的快速发展以及农业产业结构转型和优化,设施农业在农业领域的应用越来越广泛,其中,温室大棚种植已成为现代农业应用中不可或缺的一部分,但我国设施农业目前仍存在土地利用率低、盲目引进温室、运营管理费用高、劳动社产率低等诸多问题。
我国市场上现有的水果分拣设备主要包括滚筒筛孔式水果分拣机和辊带式水果分拣机2种。缺点是这种分拣技术在分拣过程中水果在分拣机上受到水果相互之间以及水果与设备之间摩擦力的时间长,水果的外部品质比较容易被破坏,而且当水果的果形不规则的时候,分拣的结果则会存在较大偏差,且此类分拣机较大,不适于大多数温室大棚。因此,研发一款基于体感检测的温室智能分拣移动平台具有重要意义。平台在大棚内进行分拣作业时,既保证了工作效率,也保证了稳定的检测精度和检测质量。
2 分拣移动平台的整体设计方案
为适应大棚空间上的局限性和特殊性并且保证平台工作效果,对整体装置进行优化设计。平台由动力部分、传动部分、控制部分、执行部分和机械部分等5个部分组成。
本作品由重量较轻、行走效率高效且使用和维护方便的四轮结构及分拣装置组成。动力部分由电池和电机组成,采用蓄电池可在一定时间内为平台供电而避免作业时插电工作带来的麻烦,控制部分以STM32为核心控制器,驱动及执行部分以步进电机、UWB模块、直流电机、舵机及等装置组成,平台可实现对采摘后的水果实时分拣,其中分拣机构结合3D打印技术,极大程度上保证水果在分拣过程中不受损害,使温室分拣操作更精简化、高效化。机械部分主要包括了平台底板、四轮机构和传送带。
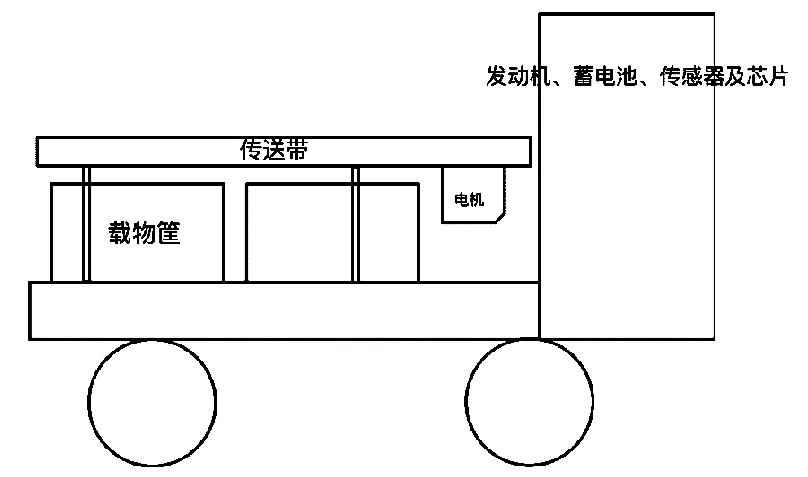
图1 分拣移动平台示意图
3 基于ANSYS的静力学分析
3.1 建立有限元模型
温室智能分拣移动平台的整机结构较为简单,在实际问温室环境中,能否以较高的完成度和精确性来完成分拣工作十分重要,因此整个平台最易受影响的部位就是履带架。在工作过程中履带架作为最主要的受力部件,有必要对其进行有限元分析。利用CREO建立履带及其履带架的三维模型,并导入到ANSYS软件中。
设置单元类型为正六面体20节点单元solid186,履带架架材料为铝合金,弹性模量为E=70 GPa,泊松比μ=0.3,密度ρ=2.72×103 kg/m3;利用系统对模型划分网格,网格大小为10 mm,履带架有限元网格模型如图2所示。

图2 分拣移动平台有限元网格示意图
3.2 履带架的静态分析
在平台底部4个截面处建立固定约束,在履带的带轮支撑柱上添加面均布载荷q,其值为150 N,进行静力学分析,其如图3和图4所示,履带架架整体受力变化不大,应力最大处的应力值仅为0.19777 MPa,小于材料的许用应力值,变形最大处为2.2928×10-4mm,变形量极小,所以整体结构设计完全符合要求。

图3 静应力分析结果
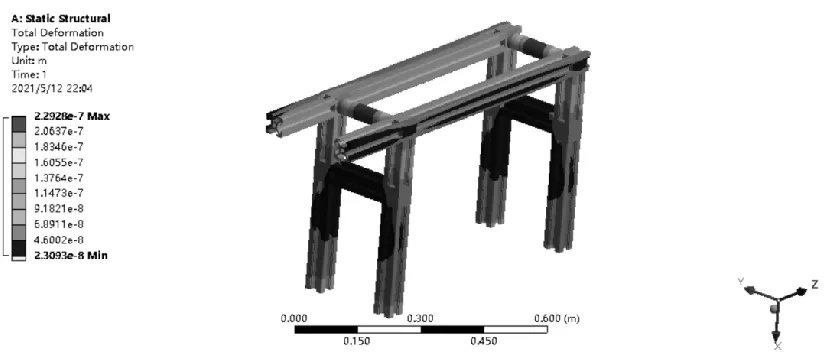
图4 应变云图
4 结语
针对温室大棚的实际环境情况,设计出一种基于体感检测的温室智能分拣移动平台,以分拣移动平台的履带架为重点,建立其三维实体模型并进行有限元分析,结果表明:履带支架受力而产生的应变以及履带架所受的应力均较小,证明该分拣移动平台设计方案是可行的。文中采用的分析方法有效科学,为节省成本,缩短机械设计的周期奠定了理论基础,在实践应用中有很重要的借鉴意义,对温室大棚农业的智能化、人性化以及高效化发展具有推进性作用。该分拣移动平台的研究设计对设施农业机械化有很重要的意义。
