对等式结构下的航迹关联算法
2021-07-13张天舒李寅龙
张天舒,周 正,李寅龙,卢 雨
(海军航空大学, 山东 烟台 264001)
在多传感器目标跟踪系统中,经常采用集中式、分布式2种结构。集中式结构中各节点发送数据至融合中心进行处理,信息损失小,但对计算量、通信量和设备性能提出较高要求[1-2]。分布式结构中各节点独立处理局部观测后发送至融合中心进行数据关联,可有效减少通信量,降低处理要求,且能达到与集中式结构相近的精度[3-4]。但集中式和分布式结构都依靠融合中心完成全局态势的信息融合,在态势瞬变的现代电子战中,多传感器以及情报源的信息传输可能造成信息爆炸,若融合中心性能瘫痪,将对作战能力造成毁灭性打击,因此提出对等式结构弥补集中式、分布式结构抗毁性差的缺点。
对等式结构已经应用于计算机、传感器组网、货币、军事等各个领域。P2P、Ad-Hoc网络、区块链、联合战术指挥系统数据链(JTIDS)等都是对等式结构的成熟应用[5-7],将对等式结构应用于航迹关联领域,可以突破各节点孤立的局限,提高我军作战能力上限,增强作战抗毁性。
在多传感器目标跟踪中,航迹关联是全局态势统一的关键。针对分布式结构下的航迹关联问题,一般采用统计类算法和不确定信息类算法。文献[8]利用量测关联性能以及变化率指标对关联波门进行预先调整,使回波数量保持稳定,提出改进的联合概率数据互联(JPDA)算法。文献[9]在此基础上,先利用波门法进行粗关联,再引入双门限对各时刻贴近度矩阵进行判决。文献[10]将信息熵引入最近邻域法来确定各量测量的权重。文献[11]提出IMM-JPDA相结合的新算法。当系统包含较大的导航、传感器校准及转换和延迟误差时,基于统计类方法的正确关联率明显下降,因此众多学者利用不确定信息类算法来解决航迹关联问题。文献[12-13]将时间采样异步、雷达系统误差的影响用区间灰数覆盖的灰区域进行描述,定义区域覆盖度与区域相离度进行航迹关联,该算法在时间异步、系统误差较大情况下具有很强的鲁棒性。文献[14]建立不同参数的区间灰数相对支持度,利用DS证据理论将支持程度进行合成,该算法能够取得较好的抗误差性。
上述算法利用概率统计、模糊数学等思想解决航迹关联问题,但具有以下不足:① 只关注雷达探测公共区域的航迹关联问题,而对等式结构强调全局态势下的航迹关联,包括各雷达独自探测区域以及边缘区域的关联,从根本上提高结构的抗毁性; ② 没有考虑由于噪声、环境、探测区域边界等原因引起的丢失航迹点问题; ③ 若多节点关联同一目标,应选择航迹质量最佳的航迹作为最终航迹,上述文献缺少对航迹质量的评估。针对以上问题,本文建立了多情况下对等式结构航迹关联模型,通过区间灰数对丢失航迹点进行弥补,构造区实混合序列,利用修正灰关联法判决航迹关联,并提出了评价航迹质量的新形式。
1 模型建立
对等式结构实际上是一种无中心化的通信模式,各节点具有同等的地位,可以相互通信、共享资源、协同工作,最终形成统一全局态势。分布式结构采用频分多址(FDMA)的通信方式,而对等式结构采用时分多址(TDMA)的通信方式,各节点在周期内依次循环报告,能够高效完成报告循环,采用TDMA的通信方式可有效降低各时刻的通信数据量,防止数据拥堵情况出现。图1为分布式结构传输数据图,假设无时间异步,节点A、B处理局部数据后,将同时发送数据至融合中心进行处理。图2为对等式结构传输数据图,各节点按照顺序在报告时间内发送数据至其余节点,完成周期循环后大量数据联结为巨大的信息池,各节点可在信息池内有选择地获取所需信息。
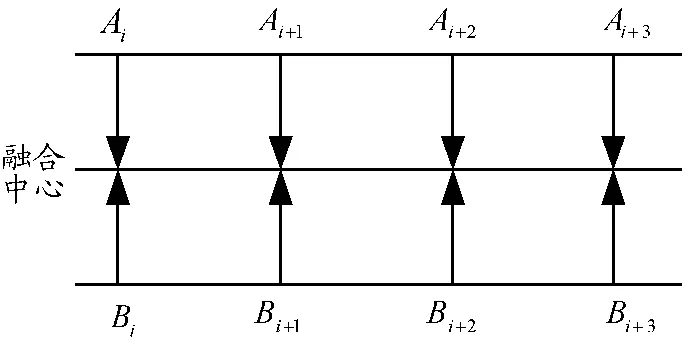
图1 分布式结构传输航迹数据图

图2 对等式结构传输航迹数据图
2 算法原理
2.1 区实混合灰关联
灰数用于描述取值范围已知、但真值未知的一类数字,区间灰数是指在某个闭区间取值且真值唯一的数,定义如下:[15]


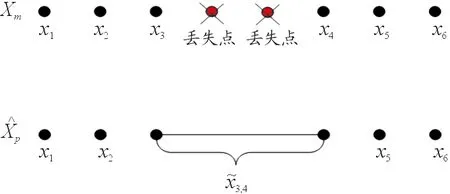
图3 丢失点航迹与区实混合航迹示意图
(1)


(2)
其中,
(3)

2.2 航迹质量评估
卡尔曼滤波中状态值的预测为:

(4)
预测值误差为:

(5)
量测值的预测为:

(6)
进而求得量测值的预测值与量测值之间的差值为:


(7)
k+1时刻的状态更新方程为:

(8)
其中,

(9)
滤波器的增益为:
K(k+1)=P(k+1|k+1)H′(k+1)R-1(k+1)
(10)
由式(5)、式(8)可得:

(11)
式(11)是各节点的报告航迹与真实航迹的差值,可反映航迹质量的优劣。
由式(7)、式(9)和式(11)可得:


H′(k+1)R-1(k+1)v(k+1)
(12)
(13)
式(12)~(13)中:H(k+1)为观测矩阵;R(k+1)为量测噪声协方差;W(k+1)是协方差为R(k+1)的零均值白色高斯噪声矩阵。

3 算法步骤
3.1 对等式算法关联流程
在对等式结构中,依据航迹点的数量和时间标记,将航迹序列分为4种类型:全部时刻航迹序列、部分时刻航迹序列、丢失点航迹序列、无需关联航迹序列。建立对等式结构航迹关联算法流程如图4所示。
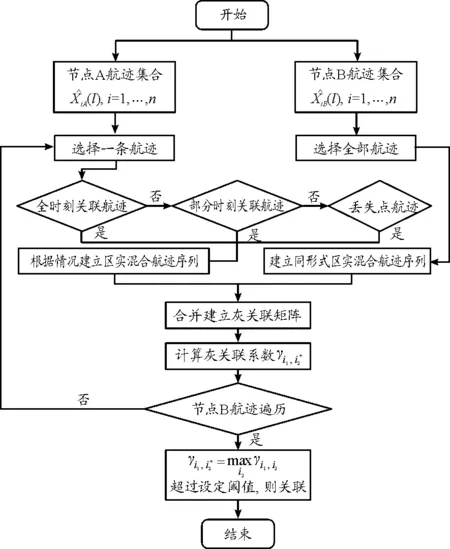
图4 对等式结构航迹关联算法流程框图
3.2 算法步骤



步骤5利用丢失前一时刻的航迹点作为区间灰数左端点,利用下一时刻接收的航迹点作为区间灰数右端点,根据式(1)计算区间灰数的距离,建立区实混合航迹参考序列,转至步骤3。
步骤6计算正确关联率Ec,错误关联率Ee,漏关联率Es。
4 仿真分析
4.1 仿真环境
假设探测区域是:x轴6~10 km,y轴6~10 km,边长为4 km×4 km的矩形区域。节点A的坐标为(0,0),节点B的坐标为(15 km,0)。节点A的x轴探测范围为6~9 km,y轴探测范围为6~10 km。节点B的x轴探测范围为7~10 km,y轴探测范围为6~10 km。各节点随机误差服从均值为0,方差为3 600 m2的高斯分布。随机生成120批目标,目标初始运动速度在300~700 m/s之间,初始角度在0~2π之间,随机生成航迹数据,在以上仿真条件下,进行500次Monte Carlo仿真实验。
4.2 仿真结果
图5表示在不同目标批数与随机误差情况下本文算法的正确关联率。在目标批数从30批增长到150批,各节点随机误差标准差从10 m逐步增长到90 m的条件下,仿真结果表明,随着目标批数和随机误差的增加,航迹正确关联率逐渐下降。在目标批数超过90批、节点随机误差的方差超过 2 500 m2时,正确关联率开始低于96%,并且下降趋势越来越快,但本文算法的正确关联率仍能保持在90%以上。
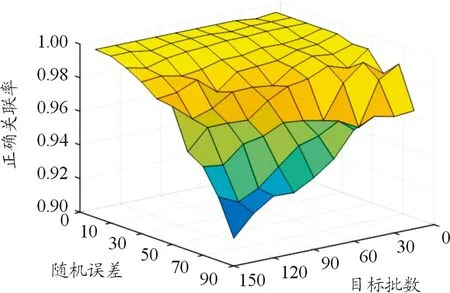
图5 目标批数与随机误差对正确关联率的影响图
将本文算法与文献[8]算法、文献[12]算法进行比较。图6为不同算法的正确关联率曲线,本文算法将航迹序列变为区实混合序列,实质上简短了航迹序列,相比文献[8]、文献[12]算法提高了航迹关联的正确率,正确关联率最终稳定在98%左右。
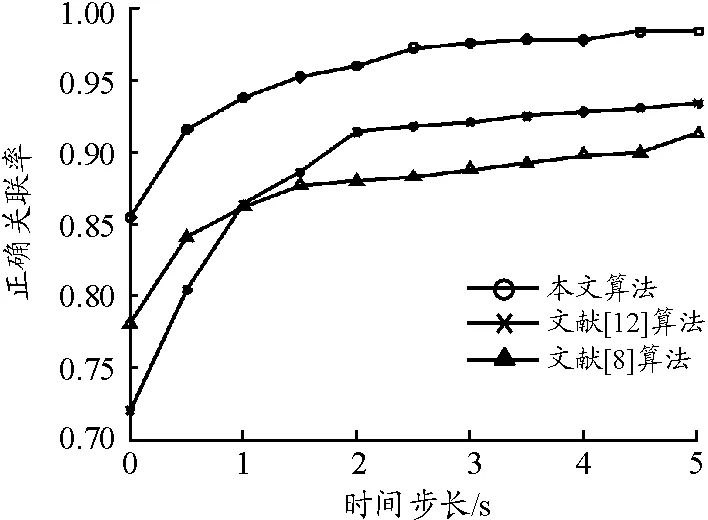
图6 不同算法的正确关联率曲线
图7为不同算法的正确关联率随采样比变化的曲线。若2部关联雷达采样比不同,统计学类算法会受到较大影响,随着采样比差距逐渐加大,文献[8]算法的正确关联率下降至70%。本文算法及文献[12]算法都利用灰色理论,对于异地雷达采样比不同情况下有着较好的鲁棒性,本文算法的正确关联率稳定在97%左右,文献[12]算法的正确关联率稳定在93%左右。
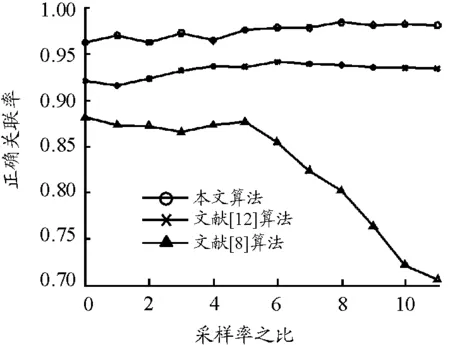
图7 采样率对正确关联率影响曲线
图8为不同算法的正确关联率随信噪比变化的曲线。信噪比越小,代表噪声干扰越大。文献[8]算法在低信噪比环境中正确关联率下降严重,文献[12]算法的正确关联率在信噪比低于30dB时开始下降。本文算法在强杂波干扰情况下正确关联率优于文献[8]、文献[12]算法,对于噪声干扰有较强的鲁棒性。
图9为在对等式结构下正确关联率随传输方式变化的曲线。仿真采用了4种传输方式:① 正序传输,即按照1,2,3,…,n的顺序传输;② 倒序传输,即按照n,…,3,2,1的顺序传输;③ 跳一个点进行传输,即1/1传输,按照1,3,5,…,n的顺序传输;④ 跳2个点进行传输,即1/2传输,按照1,4,7,…,n的顺序进行传输。仿真设置n为15。随着航迹点数的增加,正确关联率逐步提升。在4种传输方式中倒序传输最优,相比正序传输的正确率稍稳定,其次是1/1传输、1/2传输的正确率最低。传输5个以上数据点时,倒序传输和正序传输的正确率都能达到95%以上,跳点传输方式的正确率能达到90%以上。传输9个数据点以上时,倒序传输和正序传输的正确率能够达到98%且保持稳定,分析可得在航迹关联过程中传输11~14个数据点就可以满足关联需求,可通过减少传输航迹点数的方式,降低对等式结构航迹关联的通信量。
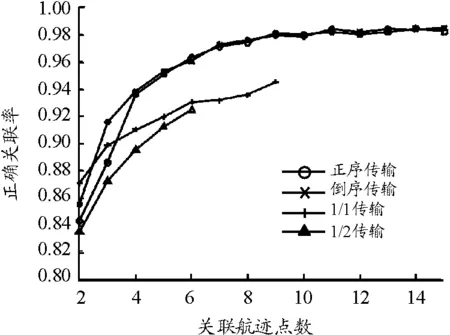
图9 不同传输方式对正确关联率影响曲线
图10为不同算法传输不同航迹点数对正确关联率的影响曲线。随着传输航迹点数的增多,各算法的正确关联率逐步提升,本文算法的正确关联率优于文献[8]、文献[12]算法,最终稳定在98%左右,其余2种算法的正确关联率稳定在90%左右。
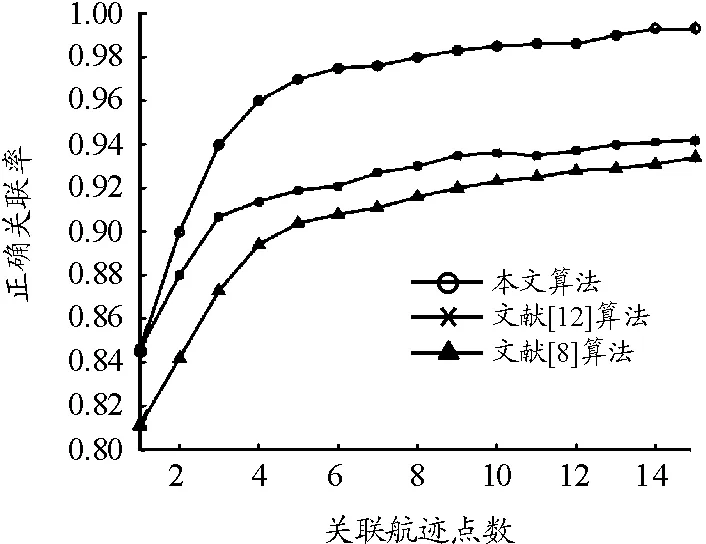
图10 不同航迹点数对正确关联率影响曲线
在不同交叉航迹批数的情况下各类算法的正确关联率如表1所示。
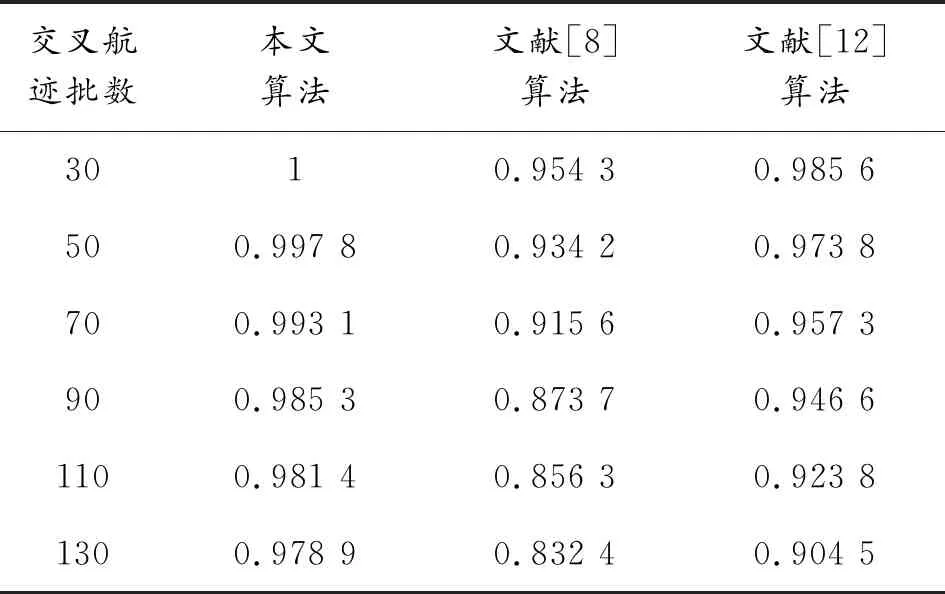
表1 不同算法对交叉航迹的正确关联率
仿真表明随着交叉航迹批数的增加,不同算法的正确关联率逐步下降,但本文算法仍然保持着较好的稳定性与鲁棒性,在交叉航迹批数达到130批时正确关联率仍能达到97%以上。对等式结构中各节点的报告时间较短,且所提算法采用区实混合序列代替原有航迹序列,本质上是将交叉航迹序列分段线性离散化,因此提高了在航迹交叉情况下的关联精度。同理,本文算法也能够提高在航迹分岔、合并情况下的鲁棒性。而文献[8]、文献[12]算法受交叉航迹影响较大,正确关联率下降严重。
不同形式航迹质量评估对比如图11所示,此时航迹序列含有均值为零,标准差不断增长的随机误差,随机选取某时刻航迹,分析航迹质量与随机误差的关系,仿真表明本文提出的滤波航迹质量与真实航迹质量的估计误差不超过15 m,在标准差不断上升的情况下,雷达的随机误差不断增长,2条曲线的趋势也随着误差的提升而上升,说明式(13)的值不断增大,符合理论预期。
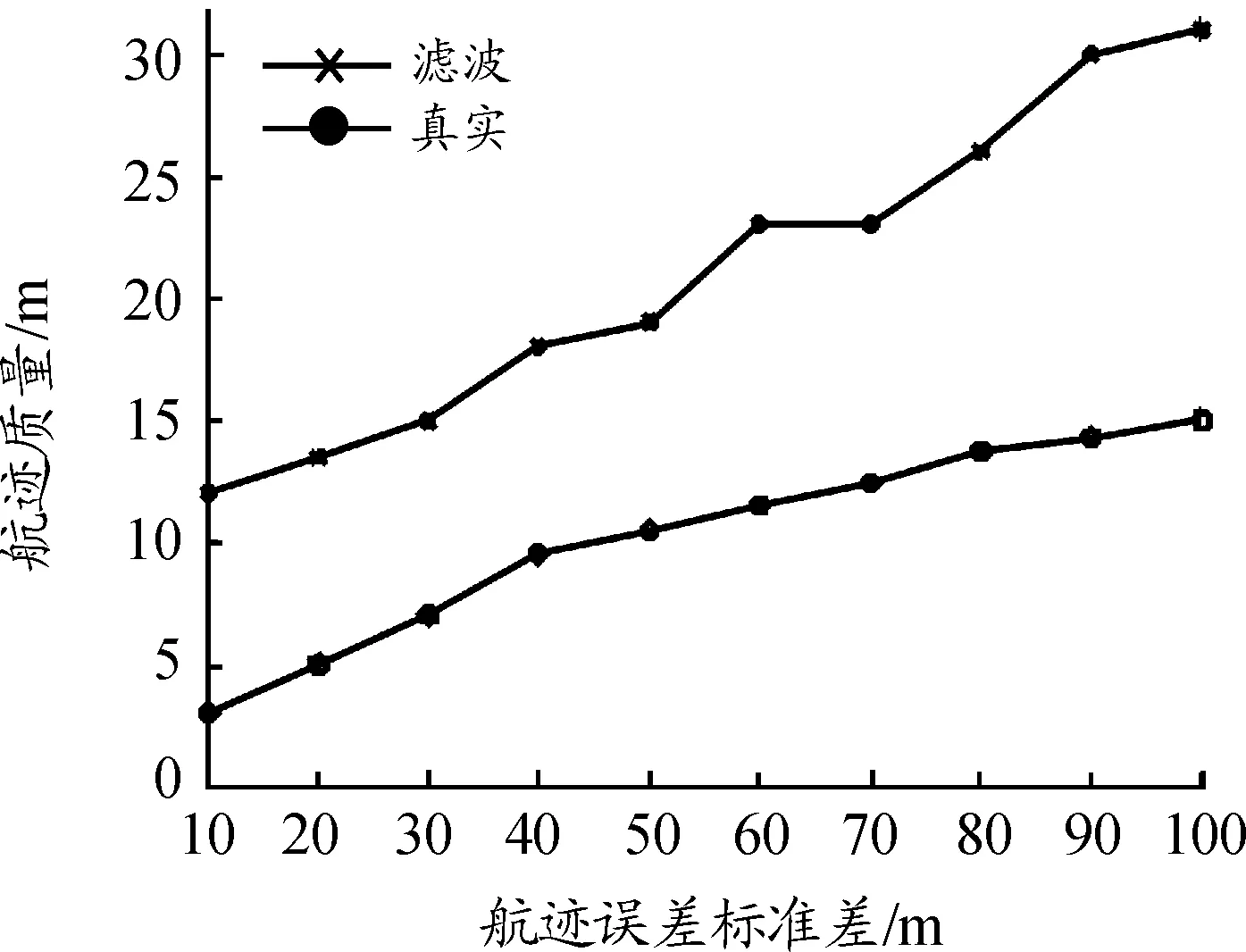
图11 不同形式航迹质量与标准差的关系曲线
图12为不同目标批数情况下不同算法的耗时曲线。随着目标批数的增加,不同算法的耗时也不断增加。文献[12]算法利用灰色区域描述系统误差与时间异步的不确定性,降低了计算量,因此耗时最少。本文算法耗时稍高于文献[12]算法,但低于文献[8]算法。文献[8]算法利用Hellinger距离评价量测噪声协方差与滤波协方差的关系以达到预先调整航迹关联波门的目的,因此算法计算量较大,并且随着目标批数的增加,耗时程度加重。
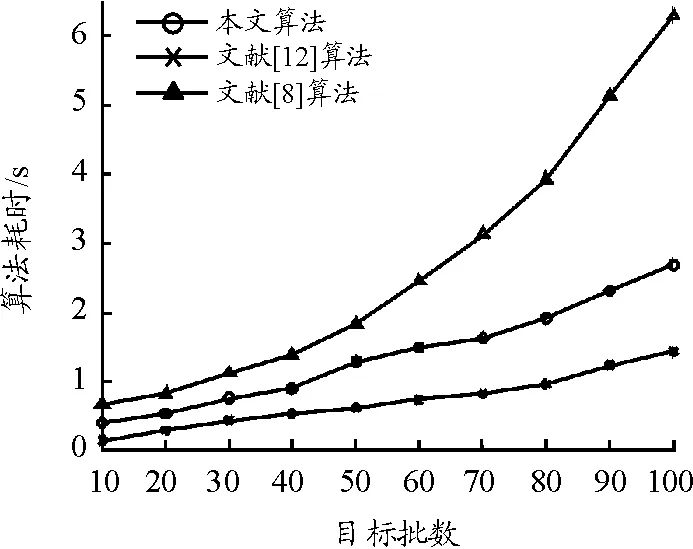
图12 目标批数对不同算法耗时曲线
图13为不同运行次数下各类算法的耗时曲线,假设此时目标批数为50批,在相同的仿真环境下,不同算法的单次运行耗时几乎不变。仿真结果表明随着运行次数的增加,算法耗时不断增加。其中文献[8]算法的耗时最长,其次为本文算法,文献[12]算法的耗时最短。
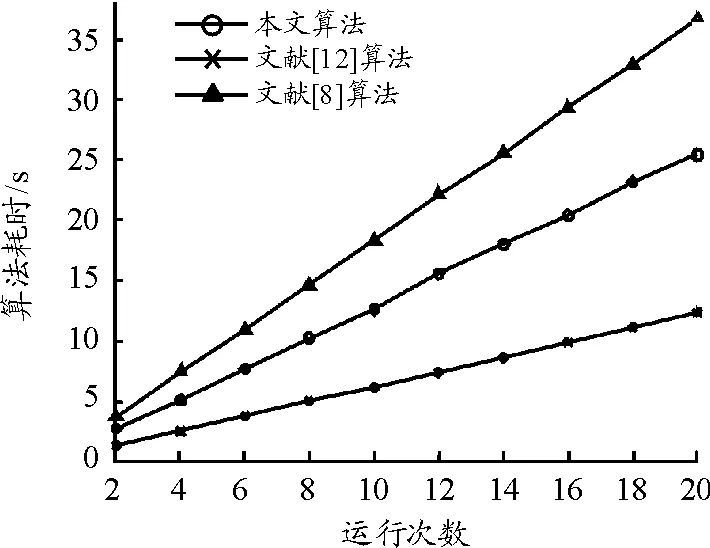
图13 运行次数对不同算法的耗时曲线
5 结论
本文在抗毁性差的分布式结构基础上提出无中心化的对等式结构,建立了对等式结构航迹关联算法模型。针对丢失航迹点问题,利用区间灰数覆盖丢失点,建立区实混合序列利用修正灰关联法进行航迹关联。围绕航迹质量评估问题,在卡尔曼滤波的基础上利用滤波值代替真实值,提出有效评价航迹质量的新形式。仿真实验表明,本文算法无需时间配准,对异步航迹有较高的正确关联率,对强杂波环境有较好的鲁棒性。在4种传输方式中,本文算法在倒序传输时正确关联率最高,1/2方式传输时正确关联率最低,当传输9个点以上时,倒序传输的正确关联率高达98%。本文算法在航迹交叉、分岔、合并等情况下仍能保持较高的关联精度,且算法的耗时适中,具有较好的工程应用前景。